1
Изобретение относится к измерительной технике для преобразования угла поворота в электрический сигнал.
Известны индукционные датчики угла с сосредоточенными обмотками 1.
Недостатком таких датчиков является невысокая точность преобразования.
Известны также индукционные устройства типа редуктосина 2, содержащие зубчатые ротор и статор, а также обмотки возбуждения и измерительные обмотки.
Недостатком данной конструкции является также невозможность повышения точности выше определенного предела.
Например, при диаметре 100 мм можно получить коэффициент редукции не более 150.
Целью изобретения является повышение точности преобразования угла поворота в электрический сигнал.
Это достигается тем, что на роторе и статоре выполнено по две аксиально смешенные зубчатые системы, между которыми установлена кольцевая обмотка.
Датчик снабжен элементами сопротивления, соединенными электрически с кольцевой обмоткой. Датчик может содержать два элемента сопротивления и катушку индуктивности, соединенные с кольцевой обмоткой по мостовой схеме. Он может быть снабжен дополнительной системой из ротора и статора, аналогичной основной, смещенной от- носительно ее аксиалъно, и двумя трансформаторами, первичные обмотки каждого из которых соединены параллельно с одной кольцевой обмоткой, а вторичные соединены встречно-последовательно.
Кроме того, индукционный датчик может to быть снабжен дополнительными двумя роторами и статорами с кольцевыми обмотками и трансформаторами, аналогичными основным, причем дополнительные роторы и статоры смещены на четверть зубцового щага относительно основных.
IS
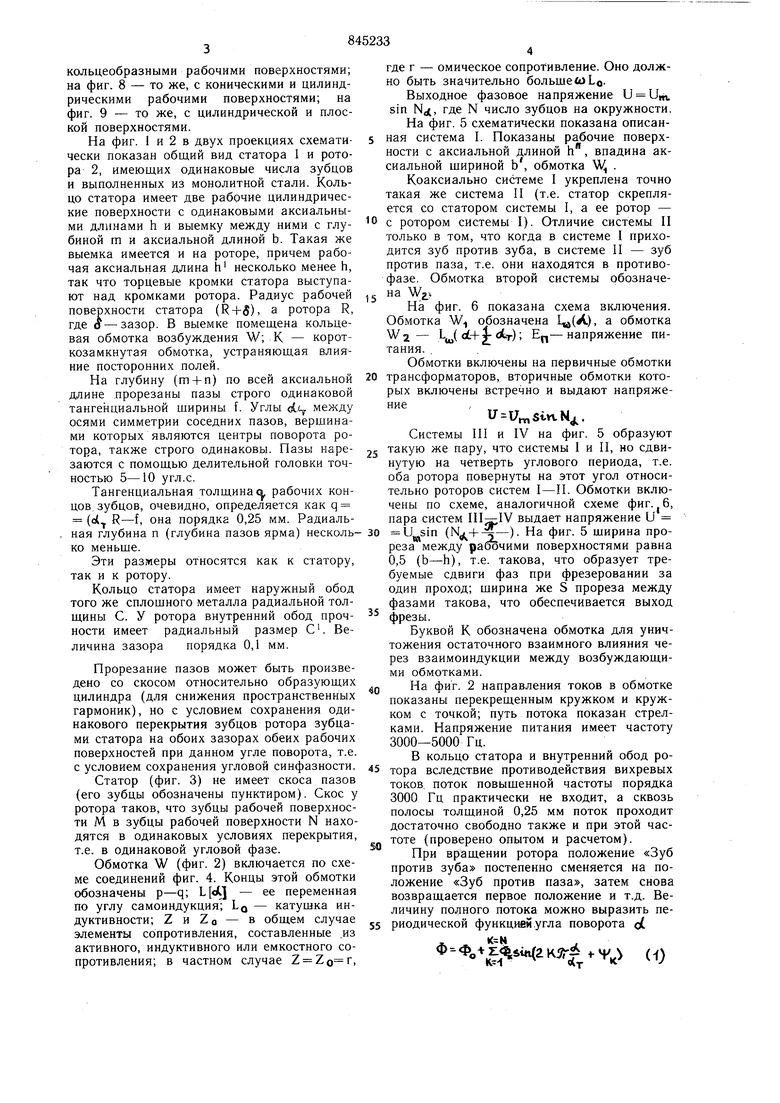
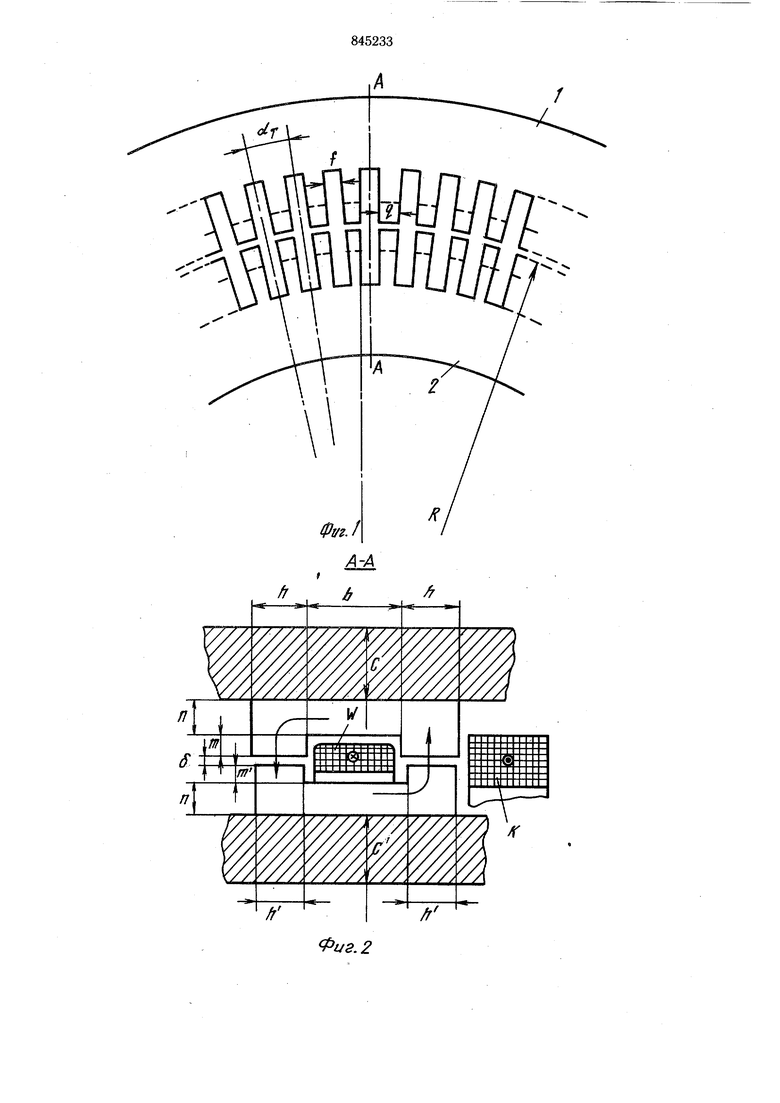
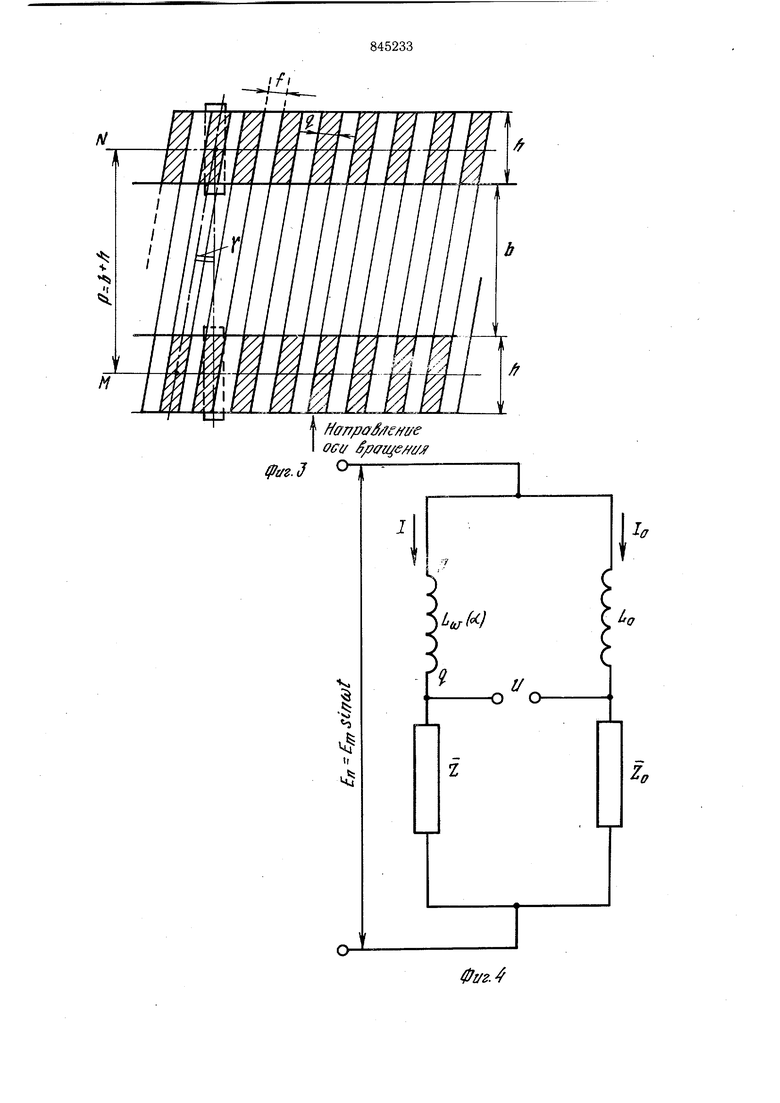
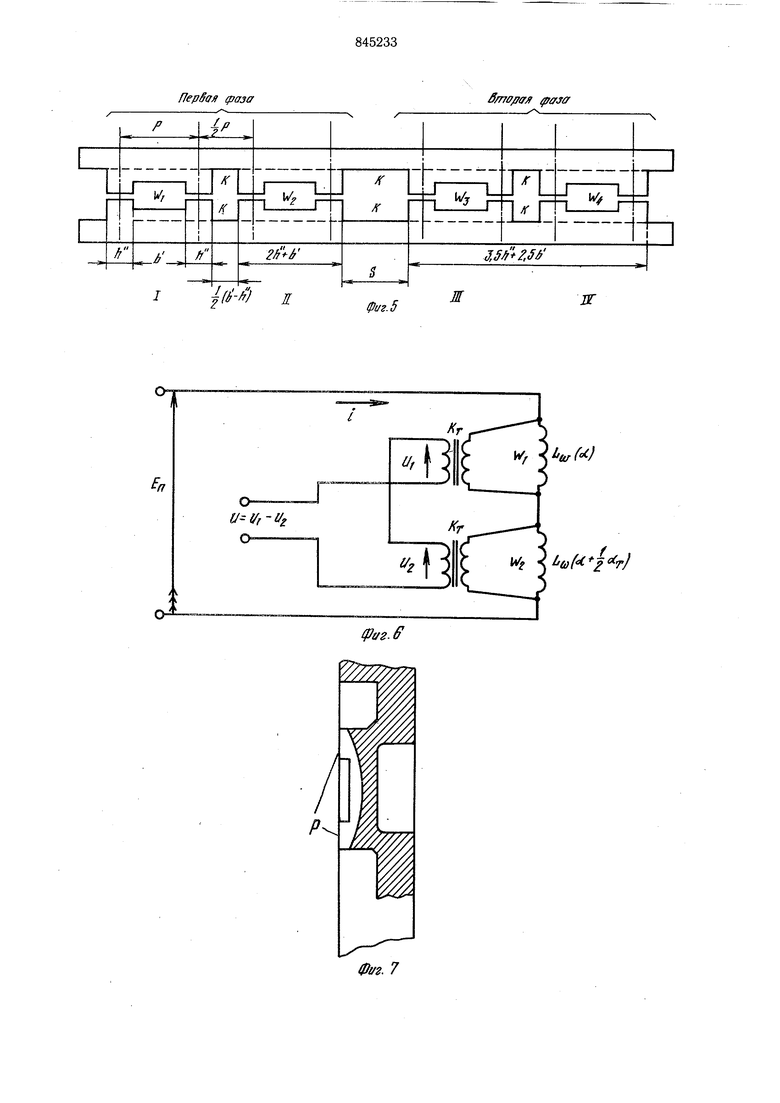
На фиг. 1 изображен участок магнитопровода датчика, поперечный разрез; на фиг. 2 - то же, продольный разрез; на фиг. 3 - взаимное расположение зубцов статора и ротора; на фиг.-4 - схема включения обмотки датчика; на ;фиг. 5 схемати20чески изображена магнитная цепь датчика; на фиг. 6 - схема включения обмоток датчика; на фиг. 7 - конструкция датчика с кольцеобразными рабочими поверхностями; на фиг. 8 - то же, с коническими и цилиндрическими рабочими поверхностями; на фиг. 9 - то же, с цилиндрической и плоской поверхностями. На фиг. 1 и 2 в двух проекциях схематически показан общий вид статора 1 и ротора 2, имеющих одинаковые числа зубцов и выполненных из монолитной стали. Кольцо статора имеет две рабочие цилиндрические поверхности с одинаковыми аксиальными длинами h и выемку между ними с глубиной m и аксиальной длиной Ь. Такая же выемка имеется и на роторе, причем рабочая аксиальная длина h несколько менее h, так что торцевые кромки статора выступают над кромками ротора. Радиус рабочей поверхности статора (R+5), а ротора R, где «У-зазор. В выемке помещена кольцевая обмотка возбуждения W; К - короткозамкнутая обмотка, устраняющая влияние посторонних полей. На глубину (т + п) по всей аксиальной длине прорезаны пазы строго одинаковой тангенциальной щирины f. Углы d.ty между осями симметрии соседних пазов, верщинами которых являются центры поворота ротора, также строго одинаковы. Пазы нарезаются с помощью делительной головки точностью 5-10 угл.с. Тангенциальная толщина рабочих концов, зубцов, очевидно, определяется KaKq (dk R-f, она порядка 0,25 мм. Радиальная глубина п (глубина пазов ярма) несколько меньще. Эти размеры относятся как к статору, так и к ротору. Кольцо статора имеет наружный обод того же сплошного металла радиальной толщины С. У ротора внутренний обод прочности имеет радиальный размер С . Величина зазора порядка 0,1 мм. Прорезание пазов может быть произведено со скосом относительно образующих цилиндра (для снижения пространственных гармоник), но с условием сохранения одинакового перекрытия зубцов ротора зубцами статора на обоих зазорах обеих рабочих поверхностей при данном угле поворота, т.е. с условием сохранения угловой синфазности. Статор (фиг. 3) не имеет скоса пазов (его зубцы обозначены пунктиром). Скос у ротора таков, что зубцы рабочей поверхности М в зубцы рабочей поверхности N находятся в одинаковых условиях перекрытия, т.е. в одинаковой угловой фазе. Обмотка W (фиг. 2) включается по схеме соединений фиг. 4. Концы этой обмотки обозначены р-q; - ее переменная по углу самоиндукция; LQ - катушка индуктивности; Z и Z о - в общем случае элементы сопротивления, составленные .из активного, индуктивного или емкостного сопротивления; в частном случае Z , где г - омическое сопротивление. Оно должно быть значительно больше fciLo. Выходное фазовое напряжение U Unt sin N, где N число зубцов на окружности. На фиг. 5 схематически показана описанная система I. Показаны рабочие поверхности с аксиальной длиной h, впадина аксиальной шириной Ь, обмотка W . Коаксиально системе I укреплена точно такая же система II (т.е. статор скрепляется со статором системы I, а ее ротор - с ротором системы I). Отличие системы II только в том, что когда в системе I приходится зуб против зуба, в системе II - зуб против паза, т.е. они находятся в противофазе. Обмотка второй системы обозначенаНа фиг. 6 показана схема включения. Обмотка W обозначена 1щ(Л), а обмотка W 2.- ta( Т т) Ef,- напряжение питания. Обмотки включены на первичные обмотки трансформаторов, вторичные обмотки которых включены встречно и выдают напряжениеU-U SitxNj,. Системы III и IV на фиг. 5 образуют такую же пару, что системы I и II, но сдвинутую на четверть углового периода, т.е. оба ротора повернуты на этот угол относительно роторов систем I-II. Обмотки включены по схеме, аналогичной схеме фиг. 6, пара систем выдает напряжение U U sin () На фиг. 5 ширина прореза между рабочими поверхностями равна 0,5 (Ь-h), т.е. такова, что образует требуемые сдвиги фаз при фрезеровании за один проход; щирина же S прореза между фазами такова, что обеспечивается выход фрезы. Буквой К обозначена обмотка для уничтожения остаточного взаимного влияния через взаимоиндукции между возбуждающими обмотками. На фиг. 2 направления токов в обмотке показаны перекрещенным кружком и кружком с точкой; путь потока показан стрелками. Напряжение питания имеет частоту 3000-5000 Гц. В кольцо статора и внутренний обод ротора вследствие противодействия вихревых токов, поток повышенной частоты порядка 3000 Гц практически не входит, а сквозь полосы толщиной 0,25 мм поток проходит достаточно свободно также и при этой частоте (проверено опытом и расчетом). При вращении ротора положение «Зуб против зуба постепенно сменяется на положение «Зуб против паза, затем снова возвращается первое положение и т.д. Величину полного потока можно выразить периодической функцией угла поворота оС ц (i)
Прорезание пазов на роторе может быть произведено с таким скосом, что амплитуды высших гармоник незначительны.
Модулированный магнитный поток будет содержать постоянную (не зависящую от угла) составляющую
Чтобы получить периодическую по углу знакопеременную функцию напряжения, нужно применить схему соединений фиг. 4.
Второй вариант состоит в том, что добавляют второй блок, изготовленный так же, как блок, изображенный на фиг. 1 -3, но находящийся по перекрытию зубцов в противофазе. Для получения второй фазы таким же образом нужно образовать еще одну подобную пару противофазных потоков со сдвигом по углу на четверть периода от первой пары.
Обмотки Wi, Wi и обмотки Wj, W (фиг. 5) соединены попарно по схеме фиг. 6. Разность напряжений U и U обозначенная и, является выходным напряжением одной из фаз. Точно такая же магнитная система, но со сдвигом всех зубцов ротора на четверть периода, дает разность (U3:-U i)- являющуюся напряжением другой фазы.
Выходная мощность датчика во много раз выще, чем в индуктосине, и значительно выще, чем в редуктосине.
В конструкции по фиг. 7 пазы по длине имеют одинаковую толщину, а рабочие поверхности зубцов трапецеидальные. Дно пазов - цилиндрическое и паз фрезеруется с осевой подачей. Сделано это с тем, чтобы усилить сопротивление отгибу зубцов при фрезеровке.
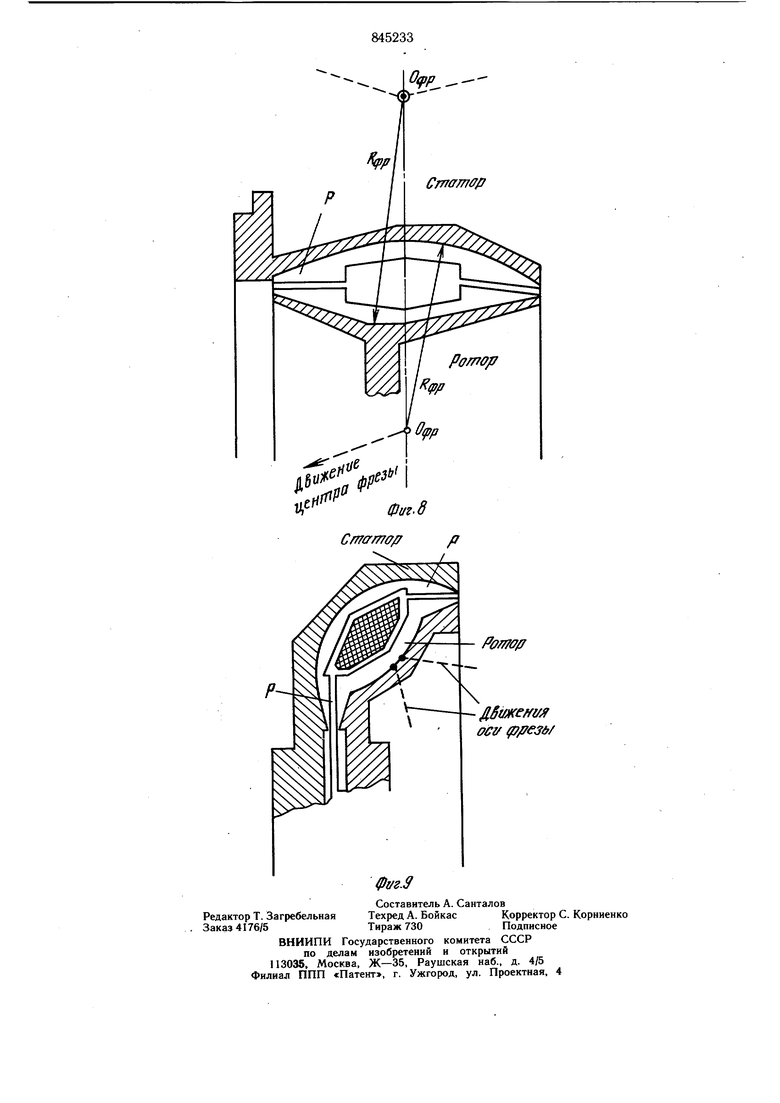
Конструкция по фиг. 8 с коническими и цилиндрическими рабочими поверхностями позволит увеличить сечение обмотки.
Возможна конструкция с цилиндрической и плоской поверхностями (фиг. 9), которая позволяет также увеличить сечение обмотки.
По сравнению с известными преобразователями данный позволит повысить точность преобразования и уменьшить габариты, а также создать цифровой измеритель угловой скорости высокой разрядности.
Формула изобретения
1.Индукционный датчик, содержащий зубчатые статор и ротор, кольцевую обмотку возбуждения, отличающийся тем, что, с целью повыщения точности, на статоре и
0 роторе выполнено по две аксиально-смещенных зубчатых системы с общими пазами, между этими системами установлена кольцевая обмотка, датчик снабжен элементами сопротивления, соединенными электрически с кольцевой обмоткой.
2.Датчик по п. 1, отличающийся тем, что он содержит два элемента сопротивления и катущку индуктивности, соединенные с кольцевой обмоткой по мостовой схеме.
3.Датчик по п. 1, отличающийся тем, что он снабжен дополнительной системой
из ротора и статора, аналогичной основной, смещенной относительно ее аксиально, и двумя трансформаторами, первичные обмотки каждого из которых соединены параллельно с одной кольцевой обмоткой, а вторичные соединены встречно-последовательно.
4.Датчик по пп. 1, 3, отличающийся тем, что он снабжен дополнительными двумя роторами и статорами с кольцевыми обмотками и трансформаторами, аналогичными
0 основным, причем дополнительные роторы и статоры смещены на четверть зубцевого щага относительно основных.
Источники информации, принятые во внимание при экспертизе
1.Пульер Ю. М. Индукционные электромеханические элементы вычислительных и дистанционно-следящих систем, - М.: «Машиностроение, 1964, с. 155-159.
2.Ахметжанов А. А. и др. Индукционный редуктосин. - М.: Энергия, 1971, с. 5-7 (прототип).
Фиг. 2
т ffffnpff /7Cffi/e I ос(/ jyffu e f/
аг. J 

| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный редуктосин | 1988 |
|
SU1571727A1 |
| Индукционный редуктосин | 1988 |
|
SU1584042A1 |
| Индукционный редуктосин | 1984 |
|
SU1216819A1 |
| Вращающийся трансформатор | 1977 |
|
SU736284A1 |
| Многополюсный двухфазный датчик угла | 1977 |
|
SU736283A1 |
| Индукционный редуктосин | 1982 |
|
SU1069081A1 |
| Бесконтактный синусно-косинусный преобразователь перемещения | 1982 |
|
SU1147924A1 |
| Устройство для определения геометрических размеров зубцовой зоны магнитопроводов статора и ротора электрической машины | 1983 |
|
SU1145312A1 |
| Индукционный датчик | 1989 |
|
SU1705974A1 |
| Датчик угла поворота вала | 1977 |
|
SU705261A1 |
фуг. 4
ПерВая ffjff
3moflff pffjff
LU,M
u)f-(
