Е
САЭ
01
О5
Изобретение относится к электротехнике и предназначено для электроприводов, подверженных воздействию случайных вoз dylцeний, в частности в системах управления электроприводом подачи дефибрера.
Цель изобретения - повьшение качества регулирования путем формирования заданного значения дисперсии ре- гулируемой координаты.
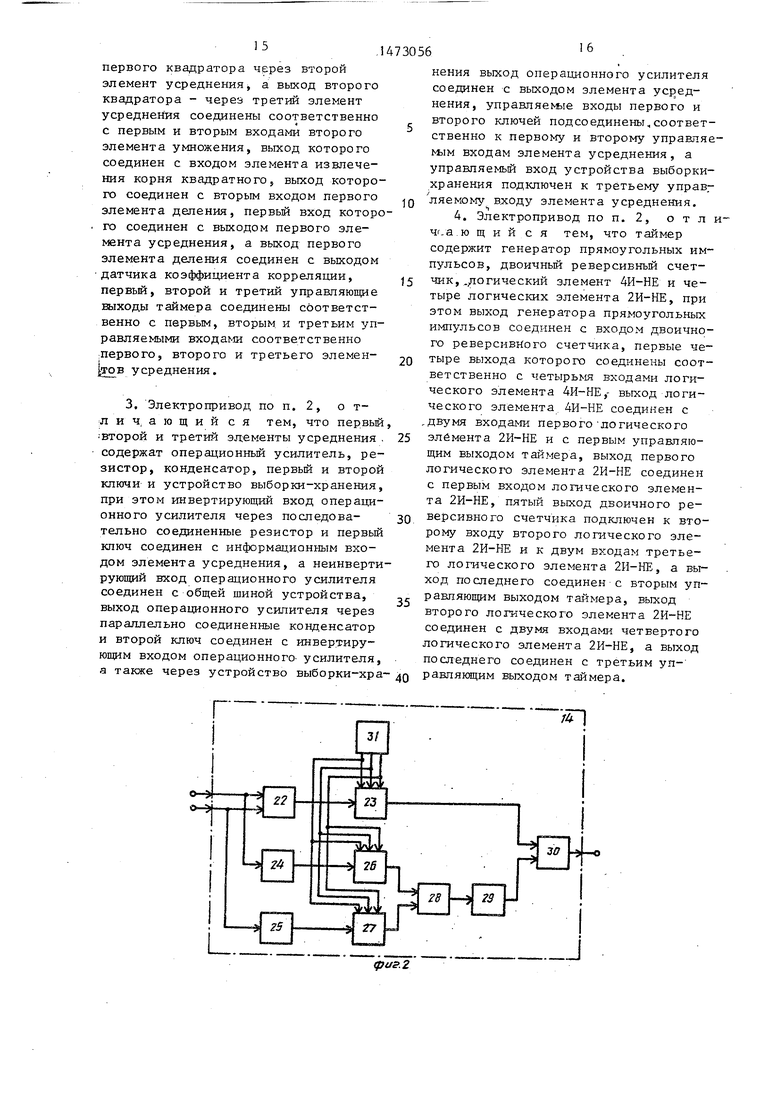
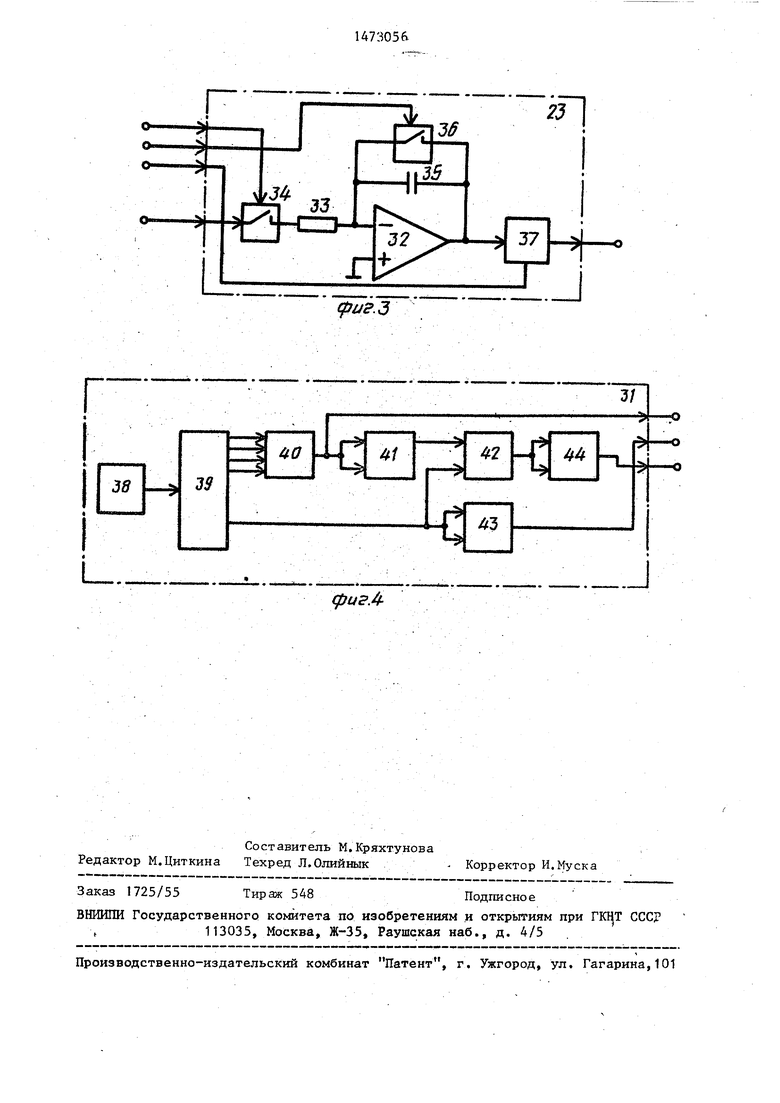
На фиг. 1 представлена функциональная схема предлагаемого электропривода; на фиг. 2 - функциональная схема датчика коэффициента корр,еля- ции; на фиг. 3 - функциональная схема элемента усреднения; на фиг. 4 - функциональная схема таймера.
Электропривод содержит электродвигатель Is якорная обмотка которого подключена к регулируемому источнику 2 питания, последовательно соединенные задатчик 3 и регулятор 4, выход которого подключен к регулируемому источнику 2 питания, датчики
5тока якоря, 6 напряжения, входы которых подключены к якорю электродвигателя 1, выход которого через рабочий механизм 7 соединен с входом датчика 8 механических обратных свя- вей, а выходь датчиков 5 тока якоря,
6напряжения и датчика 8 механических обратных связей подключены к входам регулятора 4. Первьш информационный вход переключателя 9 соединен с выходом датчика 6 напряжения, второй информационньш вход переключател
9 соединен с выходом датчика 5 тока якоря, третий информационньй вход переключателя 9 соединен с выходом дат чика 8 механических обратных связей, а четвертый, пятый и шестой информационные входы переключателя 9 соединены соответственно с первым, вторым и третьим выходами вычи.спитель- ного блока 10, первый вход которого соединен с выходом задатчика 3, а второй вход вычислительного блока 10
соединен с пятым входом регулятора 4 и с информационным вькодом фазо- сдвигающего устройства 18. Первый выход переключателя 9 соединен с первым входом датчика 11 отклонения регулируемой координаты, второй вход которого соединен с выходом з.адатчик 3, а третий вход датчика 11 отклонения регулируемой координаты .соединен с вторым выходом переключателя 9.
JQ
15
20 25
35
О
55
Первьй выход, датчика 11 отклонения регулируемой координаты соединен с входом первого датчика 12 дисперсии, а второй выход датчика 11 отклонения регулируемой координаты соедин ен с входом второго датчика 13 дисперсии и с вторьм входом датчика 14 коэффициента корреляции, первьй вход которого соединен с первым выходом датчика II отклонения регулируемой координаты,, Первый и второй входы первого устройства 15 сравнения соединены соответственно с выходом , вого 12 и второго 13 датчиков дисперсии, а управляющий выход первого устройства 15 сравнения соединен с первым управляемым входом генератора 16 случайного процесса, второй управ- ля емьш вход которого соединен с управляющим выходом задатчика 17 частоты спектра, а информационньй выход генерэтора 16 случайного процесса соединен с информационным входом фа- зосдвигающегс} устройства 18, Выход задатчика 19 дисперсии соединен с вторым входом блока 20 вычисления требуемого значения коэффициента корреляции, первьй вход которого соединен с выходом первого датчика 12 дисперсии. Выход блока 20 вычисления т|5ебуемого значения коэффициента кор- реляции соединен с первым входом второго устройства 21 сравнения, второй вход которого соединен с выходом датчика 14 коэффициента корреляции. Управляющий выход второго устройства 21 сравнения соединен с управляемым входом фазосдвигающего устройства 18.
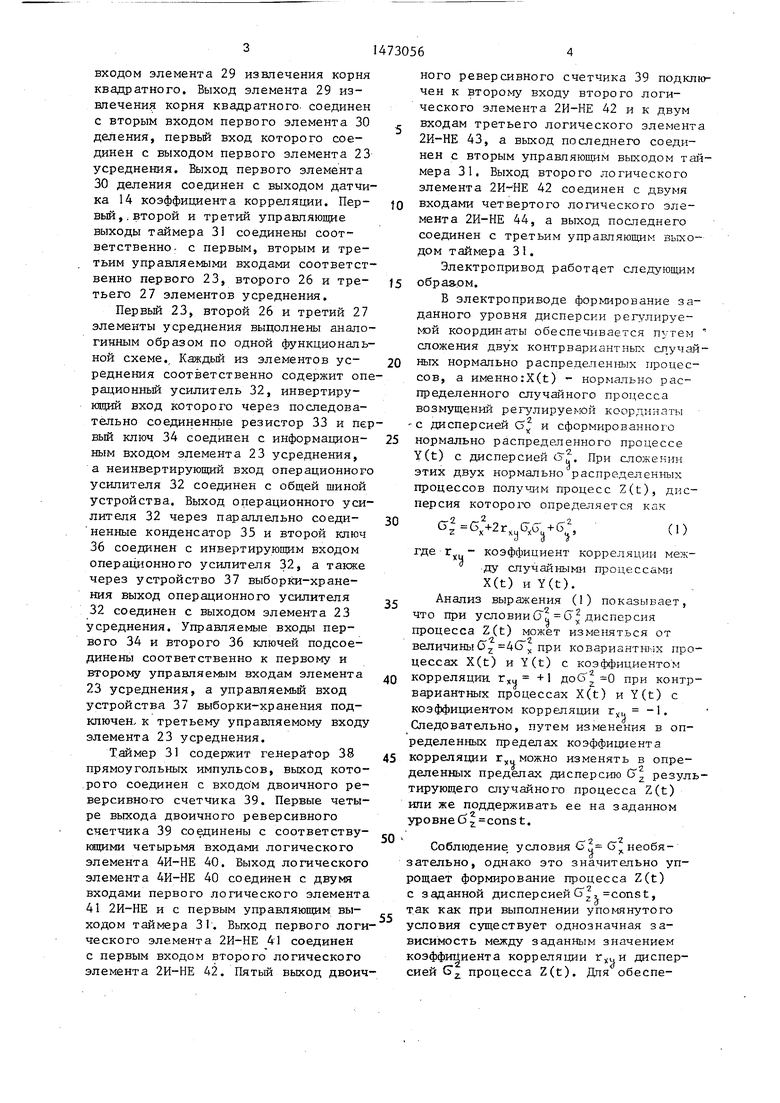
Датчик 14 коэффициента корреляции содержит первьй элемент 22 умножения, первьй и второй входы которого подключены к соответствугацим входам датчика 14 коэффициента корреляции, а вь)ход первого элемента 22 умножения соединен с входом первого элемента 23 усреднения. Входы первого 24 и второго 25 квадраторов соединены соответственно с первым и вторым входами датчика 14 коэффициента корреляции. Выход первого квадратора 24 через второй элемент 26 усреднения, а выход второго квадратора 25 через третий элемент 27 усреднения соединены соответственно с первым и втб- рым входами второго элемента 28 умножения, выход которого соединен с
входом элемента 29 извлечения корня квадратного. Выход элемента 29 извлечения корня квадратного, соединен с вторым входом первого элемента 30 деления, первьй вход которого соединен с выходом первого элемента 23 усреднения. Выход первого элемента 30 деления соединен с выходом датчика 14 коэффициента корреляции. Первьй,; второй и третий управляющие выходы таймера 31 соединены соответственно- с первым, вторым и третьим управляемыми входами соответственно первого 23, второго 26 и третьего 27 элементов усреднения.
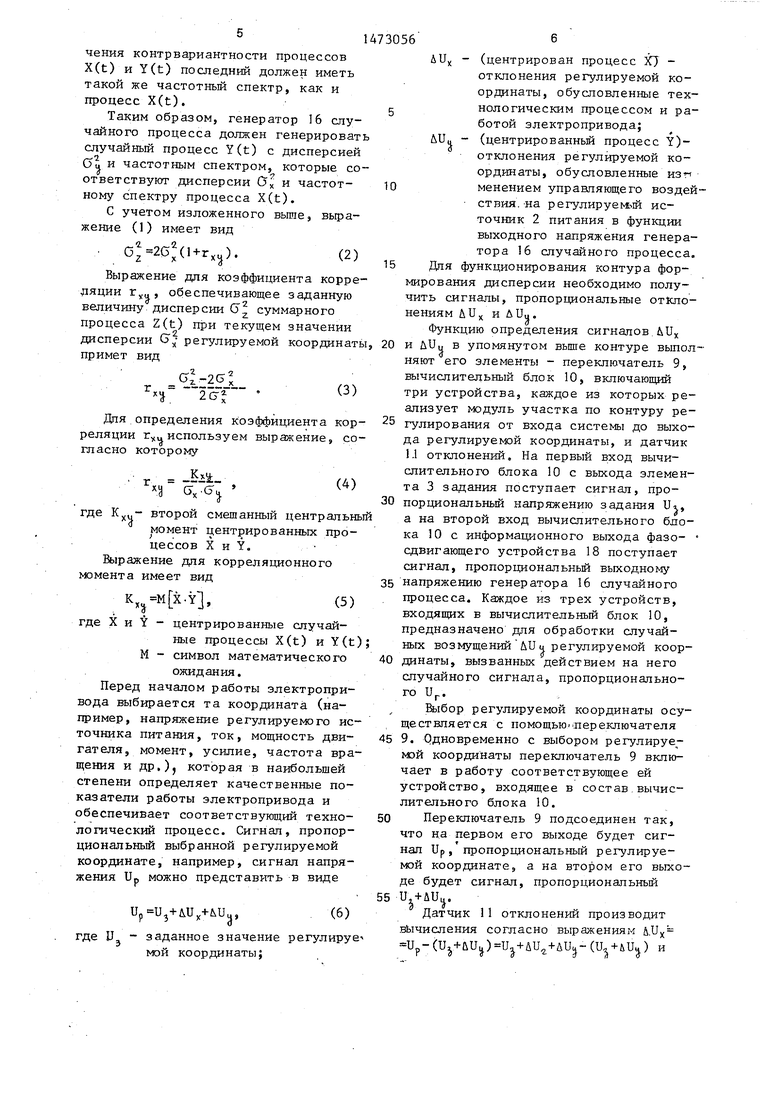
Первьй 23, второй 26 и третий 27 элементы усреднения выполнены аналогичным образом по одной функциональной схеме., Каждьй из элементов усреднения соответственно содержит опе рационньй усилитель 32, инвертирующий вход которого через последовательно соединеннь е резистор 33 и первьй ключ 34 соединен с информационным входом элемента 23 усреднения, а неинвертирующий вход операционного усилителя 32 соединен с общей шиной устройства. Выход операционного усилителя 32 через параллельно соеди- ненные конденсатор 35 и второй ключ 36 соединен с инвертирующим входом операционного усилителя 32, а также через устройство 37 выборки-хранения выход операционного усилителя 32 соединен с выходом элемента 23 усреднения. Управляемые входы первого 34 и второго 36 ключей подсоединены соответственно к первому и второму управляемым входам элемента 23 усреднения, а управляемьй вход устройства 37 выборки-хранения подключен, к третьему управляемому входу элемента 23 усреднения.
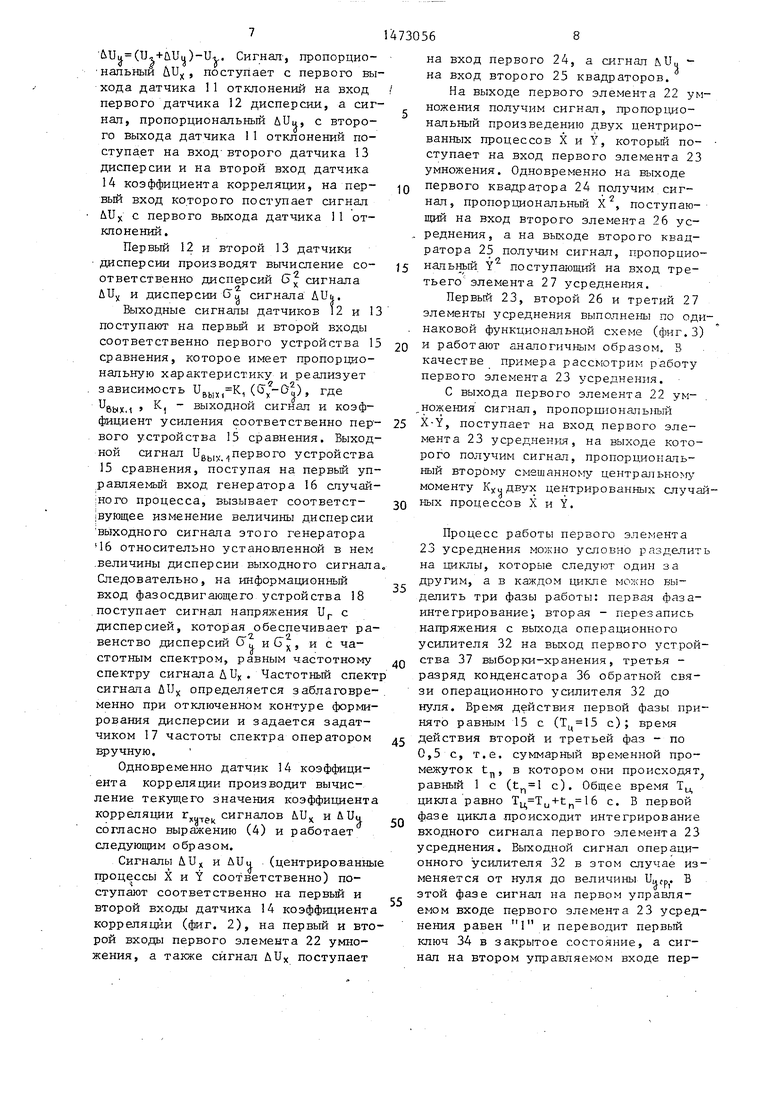
Таймер 31 содержит reHepatop 38 прямоугольных импульсов, выход которого соединен с входом двоичного ре- версивно-го счетчика 39. Первые четыре выхода двоичного реверсивного счетчика 39 соединены с соответству- кяцими четырьмя входами логического элемента 4И-НЕ 40. Выход логического элемента 4И-НЕ 40 соединен с двумя входами первого логического элемента 41 2И-НЕ и с первым управляющим выходом таймера 31. Выход первого логического элемента 2И-НЕ 41 соединен с первым входом второго логического элемента 2И-НЕ 42. Пятьй выход двоичного реверсивного счетчика 39 подключен к второму входу второго логического элемента 2И-НЕ 42 и к двум входам третьего логического элемента 2И-НЕ 43, а выход последнего соединен с вторым управляющим выходом таймера 31. Выход второго логического элемента 2И--НЕ 42 соединен с двумя 0 входами четвертого логического элемента 2И-НЕ 44, а выход последнего соединен с третьим управляющим выходом таймера 31.
Электропривод работает следующим 5 обрааом.
В электроприводе формирование заданного уровня дисперсии регулируе- мэй координаты обеспечивается путем сложения двух контрвариантных сл,учай- 0 ных нормально распределенных гфоцес- сов, а именно:X(t) - нормально распределенного случайного процесса возмущений регулируемой координаты -с дисперсией G и сформированного 5 нормально распределенного процессе Y(t) с дисперсией G. При сложении этих двух нормально распределенных процессов ПОЛУЧ1.1М процесс Z(t), дисперсия которого определяется как 0
,,jG;d + 6(1)
где г - коэффициент корреляции между случайными процессами X(t) и Y(t).
Анализ выражения (1) показывает,
что при условии (Гц и дисперсия процесса Z(t) может измeIiятьcя от величины (J 46,; при ковариантн1.1х процессах X(t) и Y(t) с коэффициентом
корреляции, г, +1 доб 0 при контрвариантных процессах X(t) и Y(t) с коэффициентом корреляции г. -1. Следовательно, путем изменения в определенных пределах коэффициента
корреляции г, можно изменять в определенных пределах дисперсию G результирующего случайного процесса Z(t)
НИИ же поддерживать ее на заданном уровне б| const.
Соблюдение, условия - 0 необязательно, однако это значительно упрощает формирование процесса Z(t) с заданной дисперсиейG, const, так как при выполнении упомянутого условия существует однозначная зависимость между заданным значением коэффициента корреляции 1)(иИ дисперсией G процесса Z(t). Для обеспе
чения контрвариантности процессов X(t) и Y(t) последний должен иметь такой же частотньй спектр, как и процесс X(t).
Таким образом, генератор 16 слу- чайного процесса должен генерироват случайный процесс Y(t) с дисперсией Gij и частотным спектром, которые соответствуют дисперсии (х и частотному спектру процесса X(t).
С учетом изложенного вьппе, вьфа- жение (1) имеет вид
(1+Г;
).
(2)
Выражение для коэффициента корреляции , обеспечивающее заданную величину дисперсии G суммарного процесса Z(t) при текущем значении дисперсии G регулируемой координаты примет вид
г..
(3)
Для определения коэффициента корреляции используем выражение, согласно которому
.г -5ii(j.cr
(4)
где второй смещанный центральный момент центрированных процессов X и Y, &1ражение для корреляционного
момента имеет вид
.,
(5)
где X и Y - центрированные случайные процессы X(t) и Y(t М - символ математического
ожидания.
Перед началом работы электропривода выбирается та координата (например, напряжение регулируемого источника питания, ток, мощность двигателя, момент, усилие, частота вращения и др.), которая в наибольшей степени определяет качественные показатели работы электропривода и обеспечивает соответствующий технологический процесс. Сигнал, пропорциональный выбранной регулируемой координате, например, сигнал напряжения Up можно представить в виде
U5-i-iU + iUu,
(6)
где Uj - заданное значение регулируемой координаты;
10
15
20
Ли - (центрирован процесс Х7 отклонения регулируемой координаты, обусловленные технологическим процессом и работой электропривода; AUu - (центрированньн процесс Y)- отклонения регулируемой координаты, обусловленные изг менением управляющего воздей- ствия. На регулируемой источник 2 питания в функции выходного напряжения генератора 16 случайного процесса. Для функционирования контура формирования дисперсии необходимо получить сигналы, пропорциональные отклонениям ди и AUu.
Функцию определения сигналов.ди и uUu в упомянутом выше контуре вьшол- няют его элементы - переключатель 9, вычислительный блок 10, включающий три устройства, каждое из которых реализует модуль участка по контуру ре- 25 гулирования от входа системы до выхода регулируемой координаты, и датчик 1.1 отклонений. На первый вход вычислительного блока 10 с выхода элемента 3 задания поступает сигнал, про- 30 порциональный напряжению задания Ui, а на второй вход вычислительного блока 10 с информационного выхода фазо- сдвигающего устройства 18 поступает сигнал, пропорциональньй выходному 35 напряжению генератора 16 случайного процесса. Каждое из трех устройств, входящих в вычислительный блок 10, предназначено для обработки случайных возмущений &Uч регулируемой коор- 40 динаты, вызванных действием на него случайного сигнала, пропорционального и.
йз1бор регулируемой координаты осу- , ществляется с помощью переключателя 45 9. Одновременно с выбором регулируемой координаты переключатель 9 включает в работу соответствующее ей устройство, входящее в состав,вычислительного блока 10.
0 Переключатель 9 подсоединен так, что на первом его выходе будет сигнал Up, пропорциональный регулируемой координате, а на втором его выходе будет сигнал, пропорциональный 5 и, + ли.
Датчик П отклонений производит вычисления согласно выражениям i.U Up-(Uj+uU)Uj+uU +AU -(U,+&U) и
MJN (U,+uUu)-U-, . Сигнал, пропорциоflк л тт
нальныи UUj( , поступает с первого выхода датчика 11 отклонений на вход первого датчика 12 дисперсии, а сигнал, пропорциональный &Uu, с второго выхода датчика 11 отклонений поступает на вход-второго датчика 13 дисперсии и на второй вход датчика
14коэффициента корреляции, на первый вход которого поступает сигнал
AUj( с первого выхода датчика 1 1 отклонений.
Первый 12 и второй 13 датчики дисперсии производят вычисление соответственно дисперсий С сигнала Ди и дисперсии СГ сигнала ALU.
Выходные сигналы датчиков 12 и 13 поступают на первьй и второй входы соответственно первого устройства 15 сравнения, которое имеет пропорциональную характеристику и реализует
зависимость Ugy.,,K, (.-об, где UeiMx.i 1 выходной сигнал и коэффициент усиления соответственно первого устройства 15 сравнения. Выходной сигнал ,; nepBoro устройства
15сравнения, поступая на первьш уп- равпяемьй вход, генератора 16 случайного процесса, вызывает соответст- |вуЮ1цее изменение величины дисперсии выходного сигнала этого генератора 16 относительно установленной в нем .величины дисперсии выходного сигнала,, Следовательно, на информационный вход фазосдвигающего устройства 18
поступает сигнал напряжения Up с дисперсией, которая обеспечивает равенство ,дисперсий J иС, и с частотным спектром, равным частотному спектру сигнала MJ . Частотный спектр сигнала ди определяется заблаговре-. менно при отключенном контуре формирования дисперсии и задается задат- чиком 17 частоты спектра оператором вручную.
Одновременно датчик 14 коэффициента корреляции производит вычисление текущего значения коэффициента корреляции г g| сигналов ли, и uUu согласно выражению (4) и работает следующим образом.
Сигналы Ли и AUu (центрированные процессы X и Y соответственно) поступают соответственно на первьй и второй входы датчика 14 коэффициента корреляции (фиг. 2), на первый и второй входы первого элемента 22 умноения, а также сигнал AUx поступает
5
на вход первого 24, а сигнал &и„ - на вход второго 25 квадраторов. На выходе первого элемента 22 умс ножения получим сигнал, пропорциональный произведению двух центрированных процессов X и Y, которьй по- ступает на вход первого элемента 23 умножения. Одновременно на выходе 10 первого квадратора 24 получим сигнал, пропорциональньй Х, поступающий на вход второго элемента 26 ус- . реднения, а на выходе второго квадратора 25 получим сигнал, пропорцио- J5 нальньй Y поступающий на вход третьего элемента 27 усреднения.
Первый 23, второй 26 и третий 27 элементы усреднения выполнены по оди- . наковой функциональной схеме (фиг.3) 0 и работают аналогичным образом. В качестве примера рассмотрим работу первого элемента 23 усреднения.
С выхода первого элемента 22 ум- ,ножения сигнал, пропоршюнальныи 5 X-Y, поступает на вход первого элемента 23 усреднения, на выходе которого получим сигнал, пропорциональный второму смешанному центральном. моменту центрированных случай- 0 ных процессов X и Y.
Процесс работы первого элемента 23 усреднения можно условью разделить на циклы, которые следуют один за другим, а в каждом цикле можно выделить три фазы работы: первая фаза- интегрирование , вторая - перезапись напряжения с выхода операционного усилителя 32 на выход первого з -стройQ ства 37 выборки-хранения, третья - разряд конденсатора 36 обратной связи операционного усилителя 32 до нуля. Время действия первой фазы принято равным 15 с ( с); время
5 действия второй и третьей фаз - по 0,5 с, т.е. суммарный временной промежуток t, в котором они происхо,цят равный 1 с (t l с). Общее время Т цикла равно с. В первой Q фазе цикла .происходит интегрирование входного сигнала первого элемента 23 усреднения. Выходной сигнал операционного усилителя 32 в этом случае изменяется от нуля до величины Uutp. В этой фазе сигнал на первом управляемом входе первого элемента 23 усреднения равен 1 и переводит первьй ключ 34 в закрытое состояние, а сигнал на втором управляемом входе первого элемента 23 усреднения равен
О, который нереводит второй ключ 36 в открытое состояние
По истечении времени Т сигнал на первом управляемом входе становится равным О, первьш ключ 34 размыкается и первое устройство 23 усредне- тгя переходит во вторую фазу. При этом процесс интегрирования прекращается, т.к. на вход резистора 33 не
f поступает входной сигнал и сигнал
на выходе операционного усилителя 32
не изменяется и равен U
LJCp,
В этой
фазе-формируется сигнал 1 на управ- ляемом входе устройства 37 выборки- хранения, которьй соединен с третьим управляемым входом первого элемента 23 усреднения. Этот сигнал переводит первое устройство 37 выбо рки-хра-20 торых 1 Гц (время 1 - 0,5 с, вре- нения в режим отслеживания и сигнал Uujp, с выхода операционного усилителя 32 повторяется на выходе устройства 37 выборки-хранения, т.е. на выходе первого элемента 23 усредне- 25 ния. В момент времени, равный Т, + +0,5 ,5 с, сигнал на третьем управляе.Мом вхбре первого элемента 23 усреднения становится равным О .(начало третьей фазы) и устройство зО 37 выборки-хранения переходит в режим хранения сигнала Пц , а на вто- ,ром управляемом входе первого элемента 23 .усреднения появляется сигнал 1, которьй nepeBo;jHT второй,5 ключ 36 в закрытое состояние, чем конденсатор 35 закорачивается и разряжается. Сигнал на выходе операционного усилителя 32 становится равным нулю, 40
Па протяжении следующего цикла - сигнал на выходе устройства 37 выборки-хранения, а следовательно, и на выходе первого элемента 23 усреднения не изменяется и равен Uuep.,545 а процессы, происходящие при интегмя - О - тоже 0,5 с). С выхода генератора 38 прямоугольных импульсов импульсы поступают на вход двоичного реверсивного счетчика 39.
С первых четырех выходов двоичного реверсивного счетчика 39 сигналы поступают на соответст.рующие четыре входа логического элемента 4И-НЕ 40. На двоичном реверсивном счетчике 39 и на. логическом элементе 4И-НЕ 40 организована схема подсчета 15-ти импульсов. Если на вход двоичного ре версивного счетчика 39 поступило не более 15 импульсов, то на выходе ло- гического элемента 4И-НЕ 40 сигнал - равен 1. Па протяжении периода шестнадцатого импульса сигнал на выход логического элемента 40 устанавлива- ется равным О.
С поступлением следующего импульса сигнал на выходе логического элемента 40 устанавливается равным 1 и снова аналогичным образом происходит подсчет 15.-ТИ импульсов. Сигнал с выхода логического элемента 4И-НЕ 40 подается через первый управляющий выход таймера 31 на первые управляемые входы первого 23, второго 26 и третьего 27 элементов усреднения. Па пятом выходе двоичного реверсивного счетчика 39 (выход D 1) при подсчете входных импульсов формируется сиг нал, поступаюп ий на второй вход второго логического элемента 2И-НЕ 42 и на первьй и второй входы третьего логического элемента 2П-НЕ 43.
рировании входного сигнала в первом элементе 23 усред нения, повторяются.. В конце следующего цикла происходит перезапись сигнала U
аср,2
пропорционального корреляционному моменту текущий цикл, с выхода операционного усилителя 32 на выход устройства 37 выборки-хранения, т.е. на выход первого элемента 23 усред-- нения. Таким образом, в любой .момент времени t сигнал на выходе первого элемента 23 усреднения будет пропорционален второму смешанному цен
тральному моменту , процессов Х и Y за предыдущий цикл работы.
Формирование управляющих сигналов, поступаюпд х на первьй, второй и третий управляемые входы первого устройства 23 усреднения, осуществляется таймером 31. Управляющие сигналы с соответствующих управляющих выходов таймера 31 аналогичным образом поступают на соответствующие управляемые входы второго. 26 и третьего 27 элементов усреднения. Функциональная схема таймера-31 приведена на фиг. 4. Таймер 31 работает следующим образом.
Генератор 38 прямоугольных импульсов генерирует на своем выходе прямоугольные импульсы, частота ко0 торых 1 Гц (время 1 - 0,5 с, вре- 5 О 5 0
5
0
5
мя - О - тоже 0,5 с). С выхода генератора 38 прямоугольных импульсов импульсы поступают на вход двоичного реверсивного счетчика 39.
С первых четырех выходов двоично, го реверсивного счетчика 39 сигналы поступают на соответст.рующие четыре входа логического элемента 4И-НЕ 40. На двоичном реверсивном счетчике 39 и на. логическом элементе 4И-НЕ 40 организована схема подсчета 15-ти импульсов. Если на вход двоичного реверсивного счетчика 39 поступило не более 15 импульсов, то на выходе ло- гического элемента 4И-НЕ 40 сигнал - равен 1. Па протяжении периода шестнадцатого импульса сигнал на выходе логического элемента 40 устанавлива- ется равным О.
С поступлением следующего импульса сигнал на выходе логического элемента 40 устанавливается равным 1 и снова аналогичным образом происходит подсчет 15.-ТИ импульсов. Сигнал с выхода логического элемента 4И-НЕ 40 подается через первый управляющий выход таймера 31 на первые управляемые входы первого 23, второго 26 и третьего 27 элементов усреднения. Па пятом выходе двоичного реверсивного счетчика 39 (выход D 1) при подсчете входных импульсов формируется сигнал, поступаюп ий на второй вход второго логического элемента 2И-НЕ 42 и на первьй и второй входы третьего логического элемента 2П-НЕ 43.
Выходной сигнал третьего логического элемента 2И-ПЕ 43 поступает через второй управляющий вькод таймера
31 на вторые управляемые входы первого 23, второго 26 и третьего 27 элементов усреднения. Выходной сигнал элемента 4И-НЕ 40 поступдат на первый и второй входы первого логического элемента 2И-НЕ 41, который выполняет операцию инверсии входного сигнала. Выходной сигнал первого логического элемента 211-НЕ 41 поступает на первый вход второго логического элемента.2И-НЕ 42. Выходной сигнал второго логического элемента 2И-НЕ 42 поступает на два входа четвертого логического элемента 2И-НЕ 44. Выходной сигнал четвертого логического элемента 2И-НЕ 44 через третий управляющий выход таймера 31 поступает на. третьи управляем)1е входы первого 23, второго 26 и третьего 27 элементов усреднения.
Таким образом, на. выходе первого элемента 23 усреднения получим сигнал пропорциональный второму-смешанному
центральному моменту , на выходе 25 нения имеет линейную характеристику
второго элемента 26 усреднения полу чим сигнал, пропсэрциональньш дисперси1 G процесса X, а на выходе тре,тьего элем.ента 27 усреднения получим сигнал, пропорциональньй дисперсии
Gy процесса Y,
Сигнал,, пропорциональный G и сигнал, пропорциональный Gu, с выходов соответственно второго 26 и третьего 27 элементов.,усреднения, поступают соответственно на первьш и второй входы второго элемента 28 умножения, на выходе которого получим сигнал, пропорциональный произведению дисперсий С - G . Сигнал, пропорциональньш произведению дисперсий G.G, поступает на вход элемента 29 извлечения корня квадратного, с выхода которого сигнал, пропорциональньш G. G , поступает на
второй вход первого элемента 30 деления, на первьн вход которого посту пает сигнал, пропорциональньй корревход-выход и реализует функцию
вы)(2 - ; те 1 утр- S
где К,2 - коэффициент усиления второ3Qго устройства 21 сравнения
Если сигнал на выходе второго уст ройства 21 сравнения равен -гулю5 т.е то угол сдвига между входным и выходным сигналами фазо- ог сдвигающего устройства , т.е. регулятор 4 производит преобразование выходного сигнала генератЬр а 16 случайного процесса в соответствую40
45
шую величину АЬ и без временной задержки и процессы X(t) и Y(t) контр- вариантны с коэффициентом корреляции что отвечает поддержанию системой управления заданного значения дисперсии G регулируемой координаты.
Если
т атек
S
т.е. на выходе
второго устройства 21 сравнения появился сигнал рассогласования, то преобразование выходного сигнала генератора 16 случайного процесса в соответствующую величину A-Uy происхо дит с соответствующим временным сдви гом, который определяется величиной сигнала рассогласования, поступающего на управляющий вход фазосдвигаю- щего устройства 18.
ляционному моменту-К и. В результате деления на выходе первого элемента 30 деления получим сигнал, пропорци- OHajTbHbm текущему значению коэффициента корреляции l, сигналов Ди и ли.
Одновременно с выхода задатчика 10 дисперсии на второй вход блока 20 вычисления требуемого значения коэффициента корреляции поступает сиг
нал, пропорциональный заданному значению дисперсии G.,, .а на первый
zj вход блока 20 вычисления требуемого
значения коэффициента корреля.щи поступает сигнал, пропорциональньш значению дисперсии (j. Блок 20 вычисления требуемого значения коэффициента корреляции производит вычисление согласно выражению (3). Требуемое значение коэффициента корреляции это такое его значение, поддержание которого при текущем значении дисперсии Сз обеспечит
задац)ное значение дисперсий G результирующего процесса Z(t). Сигнал,
пропорциональный требуемому значению коэффициента коррешяции s поступает на первый вход второго устройства 2 сравнения, на второй вход которого поступает сигнал, про- порциональньй текущему значению коэффициента корреляции ,.gj, сигналов .&и иДии, Второе устройство 21 срав
нения имеет линейную характеристику
вход-выход и реализует функцию
вы)(2 - ; те 1 утр- S
где К,2 - коэффициент усиления второ- го устройства 21 сравнения.
Если сигнал на выходе второго устройства 21 сравнения равен -гулю5 т.е то угол сдвига между входным и выходным сигналами фазо- сдвигающего устройства , т.е. регулятор 4 производит преобразование выходного сигнала генератЬр а 16 случайного процесса в соответствую
шую величину АЬ и без временной задержки и процессы X(t) и Y(t) контр- вариантны с коэффициентом корреляции что отвечает поддержанию системой управления заданного значения дисперсии G регулируемой координаты.
Если
т атек
S
т.е. на выходе
0
5
второго устройства 21 сравнения появился сигнал рассогласования, то преобразование выходного сигнала генератора 16 случайного процесса в соответствующую величину A-Uy происходит с соответствующим временным сдвигом, который определяется величиной сигнала рассогласования, поступающего на управляющий вход фазосдвигаю- щего устройства 18.
Таким образом, в данном электроприводу, подверженном воздействию
случайных возмущений, благодаря .наличию в нем контура формирования заданного значения дисперсии С гРегулируемой координаты, представляется возможным поддерживать это значение на постоянном уровне G, const, обеспечивая тем самым необходимое качество регулирования электропривода.
Формулаизобретения
1. Электропривод, содержащий электродвигатель, якорная обмотка которого подключена к регулируемому источнику питания, последовательно соединенные задатчик и регулятор, выход которого подключен к регулируе NdMy источнику питания, датчики тока якоря, напряжения и датчик механичес кихiобратных связей; рабочего механизма, выходы которого подключены к входам регулятора, отличающий с я тем, что, с целью повышения качества регулирования путем формирования заданного значения дисперсии регулируемой координаты, он дополнительно снабжен вычислительньш блоком, включающим три устройства, каждое из которых реализует модель участка по контуру регулирования от входа системы до выхода регулируемой координаты, блоком вычисления текущего значения коэффициента корреляции, переключателем, датчикбм отклонения регулируемой координаты, первым и вторым датчиками дисперсии, датчиком коэффициента корреляции, первым и вторым устройствами сравнения, генератором случайного процесса, задат- чиком частоты спектра, фазосдвигаю- |Щим устройством, задатчиком диспер- (сии, при этом первый информационный :вход переключателя соединен с выходо ;датчика напряжения, второй информаци онньм вход переключателя соединен с датчиком.тока, а третий информаци- онньш вход переключателя соединен с выходом датчика обратных механичес-- ких связей, а четвертый, пятьш и ше- стой информационные входы переключателя соединены соответственно с первым, вторым и третьим выходами вычислительного блока, первый вход котоного соединен с выходом элемента задания, а второй вход вычислительного блока соединен с пятым входом регулятора и с информационным выходом фазосдвигающего устройства, первый
г
10
J5 20 5 0 ас О ,г п
5
выход переключателя соединен с первым входом датчика отклонения регулируемой координаты, второй вход которого соединен с выходом элемента задания, а третий вход - с вторым выходом переключателя, первый выход датчика отклонения регулируемой координаты соединен с входом первого датчика дисперсии, а второй выход - с входом второго датчика дисперсии и с вторым входом датчика коэффици- ента корреляции, первый вход которого соединен с первым выходом датчика отклонения регулируемой координаты, первьй и второй входы первого устройства сравнения соединены, соответственно-, с выходами первого и второго датчиков дисперсии, а управляющий выход первого устройства сравнения соединен с первым управляе- №ш входом генератора случайного процесса, второй управляемьш вход которого соединен с управляющим выходом задатчика частоты спектра, а ин - формационный выход генератора случайного процесса соединен с информационным входом фазосдвигающего устройства, выход задатчика дисперсии соединен с вторым входом блока вычисления текущего значения коэффициента корреляции, первьй вход которого соединен с выходом первого датчика дисперсии, а выход - с первым входом второго устройства сравнения, второй вход которого соединен с выходом датчика коэффициента корреляции, управляющий выход второго устройства сравнения соединен с управ- ляе№.ш входом фазосдвигающего устройства,
2. Электропривод по п, 1, о т- ли чающий с я тем, что датчик коэффициента корреляции содержит первьй и второй элементы умножения, первый и второй квадраторы, первьй, ВТОРОЙ и тоетий элементы усреднения, элемент извлечения корня
квадратного, первьй элемент деления и таймер, при этом первьй и второй входы датчика коэффициента корреляции соединены соответственно с первым и вторым входами первого элемента умножения, выход которого соединен с входом первого элемента усреднения, входы первого и второго квадраторов соединены соответственно с первым и вторым входами датчика коэффициента корреляции, вькод
1 5
первого квадратора через второй элемент усреднения, а выход второго квадратора - через третий элемент усреднения соединены соответственно с первым и вторым входами второго элемента умножения, выход которого соединен с входом элемента извлечения корня квадратного5 выход которого соединен с вторым входом первого элемента деления, первьй вход которого соединен с выходом первого элемента усреднения, а выход первого элемента деления соединен с выходом
датчика коэффициента корреляции, первьй, второй и третий управляющие выходы таймера соединены соответственно с первым, вторым, и третьим управляемыми входами соответственно ;Первого, второго и третьего элемен- тов усреднения.
3. Электропривод по п. 2, о т- :Л и ч, а 10 щ и и с я тем, что первьй, второй и третий элементы усреднения .
содержат операционньй усилитель, резистор, конденсатор, первьй и второй ключи и устройство выборки-хранения, при этом инвертирующий вход операционного усилителя через последовательно соединенные резистор и первьй ключ соединен с информационным входом элемента усреднения, а неинвертирующий вход операционного усилителя соединен с общей шиной устройства, выход операционного усилителя через параллельно соединенные конденсатор
и второй ключ соединен с инвертирующим входом операционного- усилителя, а также через устройство выборки-хра1473056
16
нения выход операционного усилителя соединен с выходом элемента ус{эед- нения, управляе ге входы первого и второго ключей подсоединены,соответственно к первому и второму управляе- Мз1м входам элемента усреднения, а управляемьй вход устройства выборки- хранения подключен к третьему управ.- |Q ляемому входу элемента усреднения.
4. Электропривод по п, 2, о т л и- чг.а.ю щ и и с я тем, что таймер содержит генератор прямоугольных импульсов, двоичньй реверсивньй счет- 5 чик,.логический элемент 4И-НЕ и четыре логических элемента 2И-НЕ, при этом выход генератора прямоугольньгх импульсов соединен с входом двоичного реверсивного счетчика, первые че- 0 тыре выхода которого соединены соответственно с четырьмя входами логического элемента 4И-НЕ,- вьгход логического элемента. 4И-НЕ соединен с ,двумя входами первогологического 5 элемента 2И-НЕ и с первым управляющим выходом таймера, выход первого логического элемента 2И-НЕ соединен с первым входом логического элемента 2И-НЕ, пятый вьгход двоичного ре- 0. версивного счетчика подключен к второму входу второго логического элемента 2И-НЕ и к двум входам третьего логического элемента 2Н-НЕ, а выход последнего соединен с вторым уп- ракпяющим выходом таймера, вьгход второго логического элемента 2И-НЕ соединен с двумя входами четвертого логического элемента 2И-НЕ, а выход последнего соединен с третьим уп- 0 равняющим выходом таймера.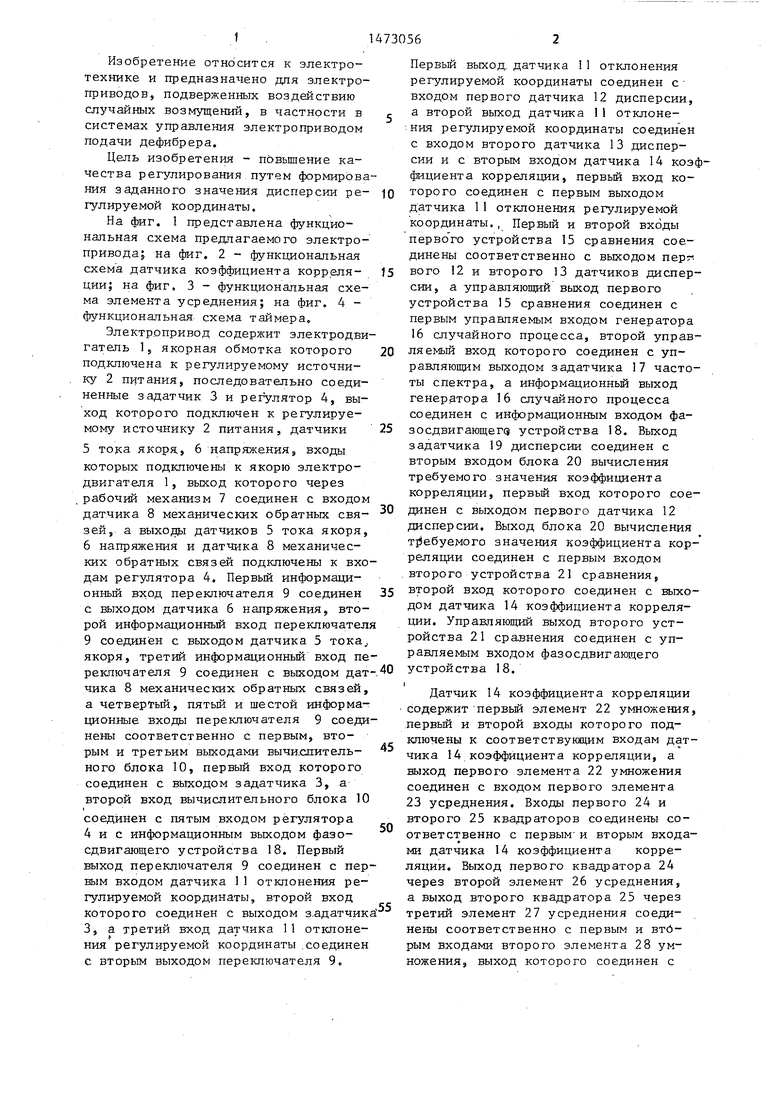
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор мощности дуговой многофазной электропечи | 1986 |
|
SU1399897A1 |
| Устройство для определения градиента потенциала в столбе дуги дуговой электропечи | 1986 |
|
SU1406826A1 |
| Устройство для определения стадий плавления стали в дуговой электропечи | 1982 |
|
SU1081814A1 |
| Устройство для определения технологических стадий плавления стали в дуговой электропечи | 1984 |
|
SU1277437A1 |
| Регулятор мощности дуговой многофазной электропечи | 1988 |
|
SU1522433A1 |
| Устройство для измерения информативных значений гармоник тока дуги трехфазной дуговой электропечи | 1987 |
|
SU1582366A1 |
| Устройство для измерения коэффициента несинусоидальности тока дуги дуговой электропечи | 1986 |
|
SU1374136A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОТКАЗОВ В ШАГОВОМ ЭЛЕКТРОПРИВОДЕ | 1992 |
|
RU2037264C1 |
| Устройство для определения стадий плавления шихты в дуговой трехфазной электропечи | 1985 |
|
SU1394474A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1221516A1 |
Изобретение относится к электротехнике и может быть использовано в устройствах, подверженных воздействию случайных возмущений. Целью изобретения является повышение качества регулирования путем формирования заданного значения дисперсии регулируемой координаты. Электропривод содержит датчик 11 отклонения регулируемой координаты, выход которого соединен с входами датчиков 12, 13 дисперсии и с входом датчика 14 коэффициента корреляции. Выход задатчика 19 дисперсии соединен с вторым входом блока 20 вычисления требуемого значения коэффициента корреляции. В данном электроприводе благодаря наличию в нем контура формирования заданного значения дисперсии регулируемой координаты обеспечивается необходимое количество регулирования электропривода. 3 з.п. ф-лы, 4 ил.
Г
(pt/p.2
1
сриг.:
L.
фигЛ
.j
| Красильников Г.А., Шехтер Я.С | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| ЧиликинМ.Г., Сандлер А.С | |||
| Общий курс электропривода: Учебник для вузов | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| и перераб | |||
| М.: Энергоиздат, 1981, с | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
