Известны способы измерения углов рассогласования лопастей воздушных винтов силовых установок с турбовинтовыми двигателями, в основу которых положено преобразование интервалов времени между импульсами, выдаваемыми индуктивными датчиками, в постоянный ток, который по величине пропорционален этим интервалам.
Отличительная особенность описываемого способа заключается в том, что углы рассогласования винтов определяют относительно какого либо одного винта, принятого за опорный, причем сравнение интервалов времени между импзльсами датчиков опорного и остальных винтов происходит непрерывно в измерительных каналах.
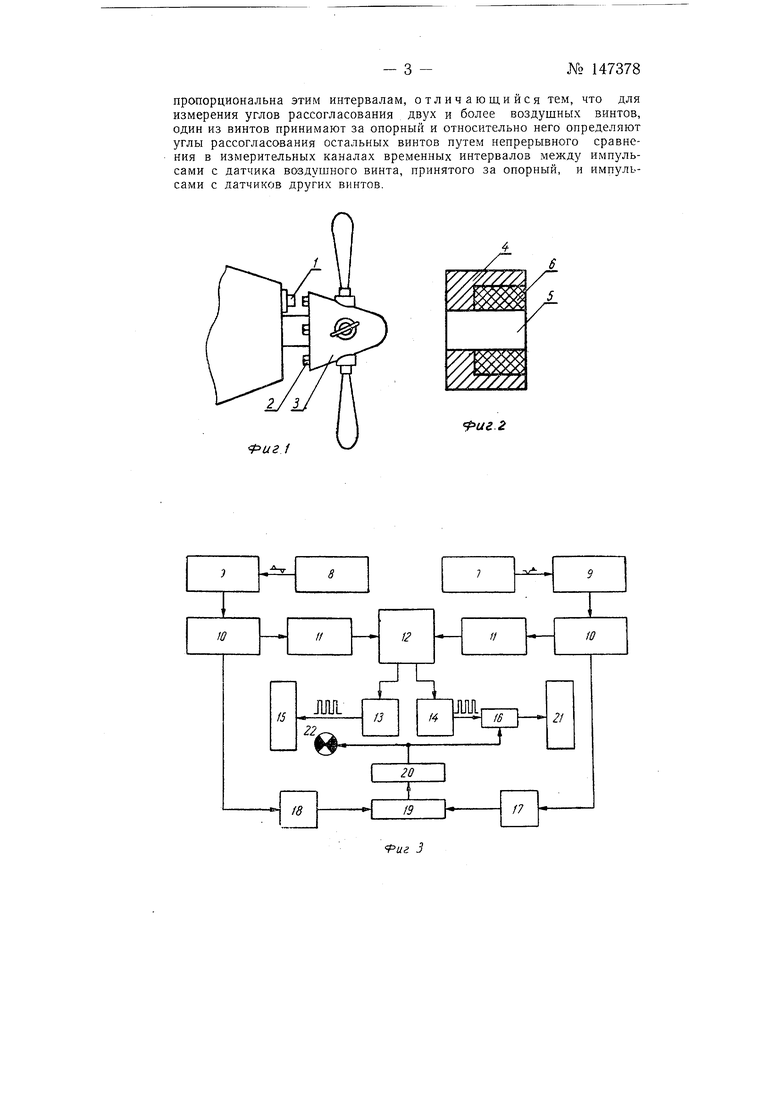
На фиг. 1 показана установка датчиков и специальных болтов на силовой установке; на фиг. 2 - датчик фиксации прохождения лопастей воздушного винта; на фиг. 3 - блок-схема измерителя углов рассогласования.
В основе измерения углов рассогласования воздушных винтов положено формирование и измерение широтномодулированных импульсов, длительность которых пропорциональна углам рассогласования лопастей воздушных винтов двух сравниваемых между собой силовых установок самолета.
Фиксация прохождения каждой лопасти воздушного винта относительно неподвижной точки осуществляется индукционным датчиком /, закрепленным на капоте силовой установки и четырьмя специальными болтами 2, закрепленными на торцовой плоскости кока 3 винта. Специальные болты крепятся по двум диаметрально противоположным направлениям строго против каждой лопасти винта.
Датчик фиксации момента прохождения лопастей винта представляет собой стальной стакан 4, внутри которого вмонтирован цилиндри№ 147378- 2 ческий магнит 5. Внутренняя полость между стенками стакана и цилиндрическим магнитом заполнена электрической обмоткой 6. При вращении винта каждый болт последовательно пересекает магнитное поле датчика и индуктирует в его обмотке импульсы. Период следования импульсов при постоянных оборотах винта пропорционален углу поворота лопасти винта равному 90°.
При измерениях одна силовая установка принимается за основную, датчик 7, установленный на ней, считается опорным, а датчики 8 на отдельных силовых установках - измерительными.
Опорные и измерительные импульсы проходят в схеме канала измерения следующий предварительный процесс формирования: усиление и ограничение в каскадах 9; дифференцирование и ограничение в каскадах. дополнительное усиление и ограничение в каскадах //.
Сформированные в этих каскадах опорные и измерительные импульсы поступают на каскад формирования широтно-модулированных импульсов, выполненный на симметричном триггере 12.
Угол рассогласования лопастей винтов (Д) двух сравнива мых между собой силовых установок определяется формулой:
Д-где / - длительность паузы между щиротно-модулированными импульсами.
Отрицательные щиротно-модулированные импульсы длительностью Г„-t поступают на катодные повторители 13 и 14, в катодных цепях которых формируются импульсы прямоугольной формы с длительностью паузы, равной длительности паузы широтно-модулированных импульсов.
В цепь катодного повторителя 13 включен стрелочный указатель /5, измеряющий среднее значение катодного тока, пропорционального углу рассогласования лопастей винтов.
Регистрация углов рассогласования на осциллограмму щлейфового осциллографа осуществляется через сглаживающий фильтр 16, включенный в катодную цепь катодного повторителя 14. Ввиду того, что при малых углах рассогласования и на углах, близких к 90° (неизмеряемые углы) могут быть сбои в работе схемы, в блок-схеме измерителя предусмотрены дополнительно следующие сигнализациоино-кодировочные каскады: каскады кип-реле 17 и 18, формирующие прямоугольные импульсы малой длительности; каскад 19 совпадения, формирующий импульсы, запускающие кип-реле 20 в случае совпадения во времени прямоугольных импульсов, поступающих от кип-реле 17 и 18.
Импульсы, формируемые кип-реле 20, поступают на входную цепь фильтра 16 и кодируют на осциллограмме щлейфового регистратора 21 запись неизмеряемых углов рассогласования; на неоновую лампочку 22, сигнализирующую неизмеряемые углы рассогласования для стрелочного указателя 15.
Предлагаемый способ позволяет обеспечить измерение разности углов с достаточно высокой точностью, что упрощает методику измерения и повыщает ее надел ность.
Предмет изобретения
Способ измерения углов рассогласования лопастей воздущных винтов силовых установок с турбовинтовыми двигателями, основанный на преобразовании- временных интервалов между импульсами, поступающими с индуктивных датчиков, в постоянный ток, величина которого
тпропорциональна этим интервалам, отличающийся тем, что для измерения углов рассогласования двух и более воздушных винтов, один из винтов принимают за опорный и относительно него опрелДеляют углы рассогласования остальных винтов путем непрерывного сравнения в измерительных каналах временных интервалов между импульсами с датчика воздушного винта, принятого за опорный, и импульсами с датчиков других винтов.
fue 2

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ТУРБОВИНТОВОГО ДВИГАТЕЛЯ | 1992 |
|
RU2022144C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И МНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 1999 |
|
RU2152626C1 |
| Устройство для приведения в действие трамвайной стрелки с поезда | 2002 |
|
RU2224675C2 |
| УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ТРАМВАЙНОЙ СТРЕЛКИ С ПОЕЗДА | 2001 |
|
RU2191715C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПЕРЕВОДА ТРАМВАЙНОЙ СТРЕЛКИ | 2000 |
|
RU2191126C2 |
| СПОСОБ ВЫЯВЛЕНИЯ ДЕФЕКТОВ (ВОЗМУЩЕНИЙ) В ГАЗОВЫХ ЦЕНТРИФУГАХ ИЗОТОПНО-РАЗДЕЛИТЕЛЬНОГО КАСКАДА И СИСТЕМА ДИАГНОСТИКИ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2236308C2 |
| КОРАБЕЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ И АНТЕННОЕ УСТРОЙСТВО ДЛЯ НЕЕ | 2003 |
|
RU2254593C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ТЕМПЕРАТУРЫ В РАБОЧЕЙ КАМЕРЕ УСТРОЙСТВА ДЛЯ ПРОИЗВОДСТВА ВЗОРВАННОГО ЗЕРНА | 1998 |
|
RU2147139C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ УГЛОВЫМ ПОЛОЖЕНИЕМ ОБЪЕКТА | 2003 |
|
RU2247421C1 |
| ИЗМЕРИТЕЛЬ РАСХОДА ВОЗДУХА | 2001 |
|
RU2215265C2 |