Изобретение относится к системам автоматического управления угловым положением объектов и может найти применение при создании автоматических систем управления объектов, подвешенных в гравитационном поле сил при наличии перемещающихся масс, в частности в стратосферных астростанциях при подвесе последних вблизи их центра масс.
Известны устройства для управления угловым положением объекта (а.с. №185097, G 05 D 1/10, 1966 г. - [1], В.А.Крат и Л.М.Котляр. “Стратосферная астрономия”, издательство “Наука”, Л., 1976 г., стр. 81, 87 – [2]), изменяющие дисбаланс управляемых объектов. Во-первых, это устройства, называемые автоматами балансировки или механизмами центровки. Автомат балансировки состоит из двух перекрещивающихся под углом 90° направляющих, жестко связанных с объектом, по которым движутся балансировочные грузы с автономными приводами. Балансировочные грузы предназначены для установки объекта в горизонтальной плоскости по сигналам с датчиков углов отклонения объекта от плоскости горизонта или исполнительных устройств систем управления, парирующих гравитационный момент, действующий на объект, если центр масс не находится на одной вертикали с центром подвеса – [1]. Во-вторых, это устройства, с помощью которых производится регулировка величины дисбаланса, а не только вывод дисбаланса на вертикаль. К таким относится устройство, наиболее близкое по технической сущности к предлагаемому устройству, взятому за прототип – [2],
Это устройство содержит измерительный блок и три балансировочных груза с приводами, установленные на трех взаимоортогональных направляющих, жестко связанных с объектом. Грузы управляются по телеуправлению. На телескопе установлена телевизионная камера, предназначенная для передачи изображения наблюдаемого объекта.
Балансировка происходит следующим образом. Наличие телевизионной камеры дает возможность оператору наблюдать изображение исследуемого объекта. Характер колебаний изображения объекта наблюдения на экране телевизионной системы указывает на качество балансировки. Когда телескоп сбалансирован, изображение объекта на экране телевизионного монитора плавно качается около среднего положения. Оператор, телемеханически управляя грузами путем поочередных пробных перемещений каждого груза, добивается требуемых параметров колебаний изображения, а следовательно, и требуемого дисбаланса.
Однако оно предполагает наличие оптической системы и в случае ее отсутствия не может быть использозвано. Кроме того, это устройство не рассчитано на автоматическое измерение дисбаланса и его последующую стабилизацию, поэтому обладает большим временем регулирования дисбаланса, малой помехоустойчивостью, а вследствие этого и меньшей точностью.
Изобретение решает задачу наведения объекта на заданный угол возвышения за минимальное время и с высокой точностью при сохранении стабилизации дисбалоанса.
Поставленная задача достигается тем, что устройство для управления угловым положением объекта, подвешенное за центр масс, содержащее балансировочные грузы с приводами, расположенные по ортогональным осям объекта, и систему балансировки, связанную с объектом, дополнительно содержит переключающее устройство, программное устройство, систему эталонного наведения и систему программного наведения, а также блок создания управляющего момента на объект, выходы которого связаны с объектом, а вход - с управляющим выходом системы программного наведения, измерительный вход которой связан с объектом, сравнивающий - с выходом системы эталонного наведения, переключающий - со вторым выходом программного устройства, а программный - с первым выходом программного устройства, третий выход которого соединен со входом системы эталонного наведения, а четвертый выход - со входом переключающего устройства, другие входы которого связаны с выходами системы балансировки, а выходы - со входами приводов балансировочных грузов.
В устройстве блок создания управляющего момента на объект может быть выполнен в виде двух управляющих грузов, связанных с приводами и перемещающихся по ортогональным осям, связанным с объектом, предназначенных для создания моментов по тангажу и крену, или в виде реактивных или пропеллерных двигателей, расположенных на ортогональных осях для создания моментов по тангажу и крену.
Система эталонного наведения состоит из последовательно соединенных генератора эталонного сигнала и блока двойного интегрирования, входом которой является вход генератора эталонного сигнала, а выходом - выход блока двойного интегрирования, а система программного наведения состоит из задающего генератора, первого устройства сравнения, измерительного устройства, второго устройства сравнения, ключа и усилительно-преобразовательного устройства, выход которого является управляющим выходом системы программного наведения, а вход соединен с выходом первого сравнивающего устройства, вычитающий вход которого соединен с выходом ключа, первый вход которого является переключающим входом системы программного наведения, а суммирующий вход - с выходом задающего генератора, вход которого является программным входом системы программного наведения, второй вход ключа соединен с выходом второго сравнивающего устройства, суммирующий вход которого подключен к выходу жестко связанного с объектом измерительного устройства, вход которого является измерительным входом системы программного наведения, а вычитающий вход является сравнивающим входом системы программного наведения.
Сущность изобретения поясняется Фиг.1-Фиг.3, где:
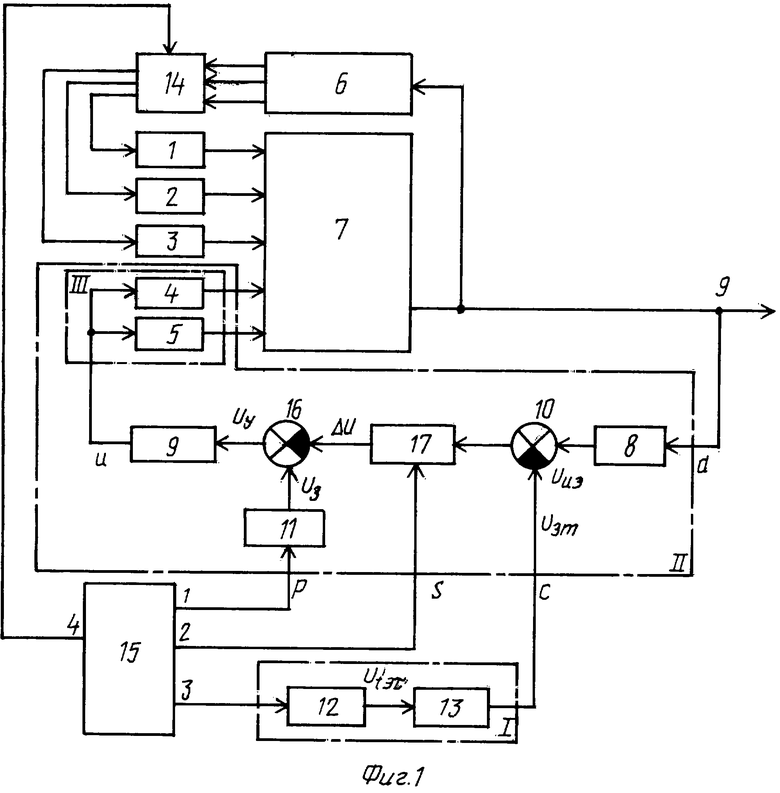
Фиг.1 - блок-схема предлагаемого устройства;
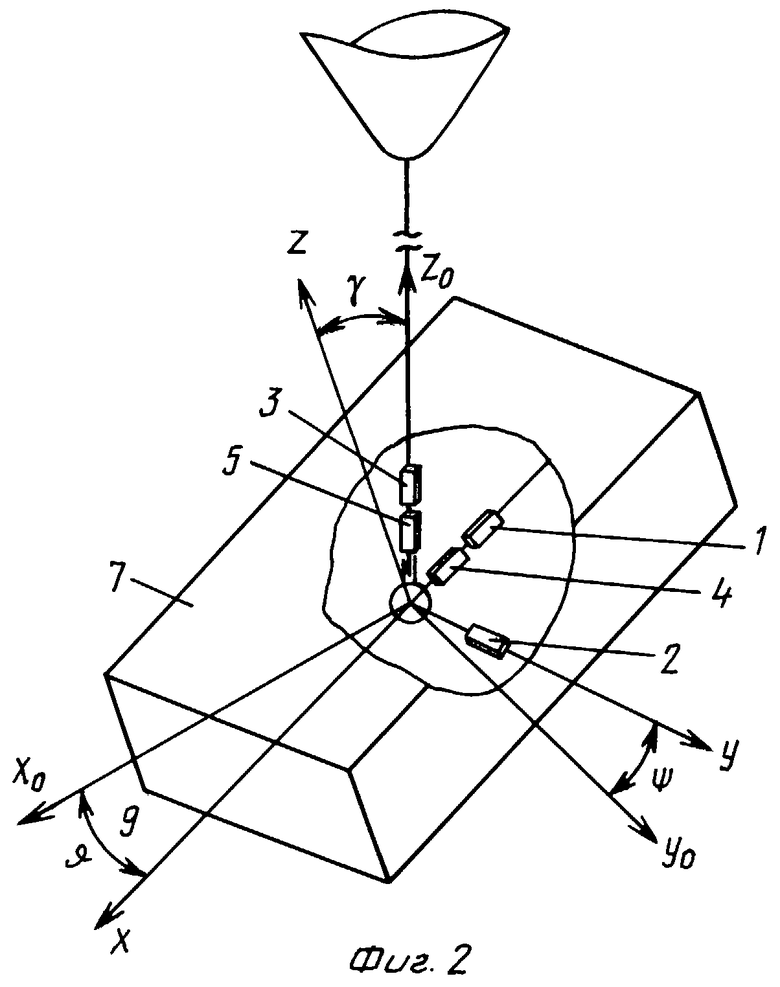
Фиг.2 - объект управления с балансировочными и управляющими грузами;
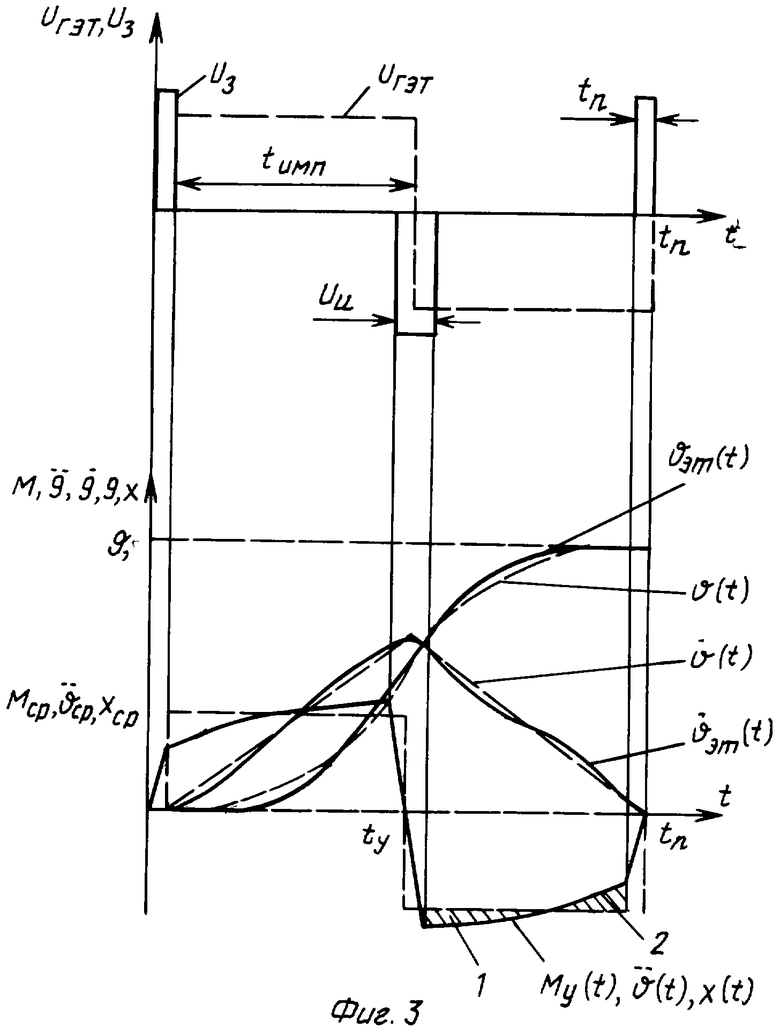
Фиг.3 - график изменения параметров движения объекта и следования импульсов генераторов при управлении грузами по тангажу.
Здесь:
1, 2, 3 - балансировочные грузы,
4, 5 - грузы, реактивные двигатели и пропеллерные двигатели, управляющие положением объекта,
6 - система балансировки,
7 - объект,
8 - измерительное устройство,
9 - усилительно-преобразовательное устройство,
10 - второе сравнивающее устройство,
11 - задающий генератор,
12 - генератор эталонного сигнала,
13 - блок двойного интегрирования,
14 - переключающее устройство,
15 - программное устройство,
16 - первое сравнивающее устройство,
17 - ключ,
I - система эталонного наведения,
II - система программного наведения,
d - измерительный вход,
с - сравнивающий вход,
s - переключающий вход,
р - программный вход,
u - управляющий выход,
III - блок создания управляющего момента на объект.
Объект 7 подвешен за центр масс и сбалансирован системой балансировки 6, управляющей грузами 1, 2, 3. Переключающее устройство 14 находится между системой балансировки 6 и балансировочными грузами 1, 2, 3 и служит для запоминания (сохранения) балансировочного положения грузов 1, 2, 3. Программное устройство присоединено к переключающему устройству 14, задающему генератору 11, ключу 17 и генератору эталонного сигнала 12 и обеспечивает их согласованную работу. Генератор эталонного сигнала 12 подает на вход блока двойного интегрирования 13 импульсный сигнал UГЭТ. Второе сравнивающее устройство 10 сравнивает сигналы от датчика 8, измеряющего угловое положение объекта 7, и от блока двойного интегрирования 13 и выдает разностный сигнал, который через ключ 17 поступает на первое сравнивающее устройство 16, на другой вход которого поступает сигнал от задающего генератора 11. Результат сравнения этих сигналов поступает на усилительно-преобразовательное устройство 9, управляющее блоком создания управляющего момента на объект III, связанным с объектом 7.
Объект 7 представляет собой твердое тело, подвешенное за центр масс на маломоментном гидростатическом сферическом подшипнике (Фиг.2). Система балансировки 6 и балансировочные грузы 1, 2, 3 с приводами, двигающиеся по осям ОХ, ОY, ОZ соответственно, обеспечивают ликвидацию дисбаланса объекта 7.
Блок создания управляющего момента на объект может быть выполнено в трех вариантах:
1) в виде реактивных двигателей (РД)
2) в виде пропеллерных двигателей (ПД)
3) с помощью грузов.
Усилительно-преобразовательное устройство 9 (например, полупроводниковый усилитель) формирует управляющий сигнал на блок создания управляющего момента, например, на приводы управляющих грузов 4, 5 (перемещаемых по цилиндрическим направляющим) для поворота объектов 7 на требуемый угол.
Отключающее устройство 14 (например, реле) служит для запоминания (сохранения) балансировочного положения путем отключения системы балансировки 6 на время перемещения объекта 7 на требуемый угол.
Измерительное устройство 8 (например, индукционный или оптический датчик с растровой решеткой) предназначено для измерения углового положения  объекта 7.
объекта 7.
Первое сравнивающее устройство 16 (например, сумматор, построенный на операционном носителе) вырабатывает сигнал разности между заданным сигналом Uз управления грузами 4, 5 и отклонением Δ U от эталонного движения объекта 7.
Второе сравнивающее устройство 10 (например, сумматор на операционном усилителе) вырабатывает сигнал разности Δ U между измеренным угловым положением Uиз объекта 7 и его эталонным значением Uэт.
Ключ 17 (например, реле) служит для размыкания обратной связи во время перемещения управляющих грузов 4, 5.
Последовательно соединенные генератор эталонного сигнала 12 (например, генератор прямоугольных импульсов) и блок двойного интегрирования 13 (например, последовательно включенные интеграторы на операционных усилителях) вырабатывают эталонное значение Uэт заданного углового положения ϑ объекта 7 за минимальное время, а задающий генератор 11 (генератор прямоугольных импульсов на операционном усилителе и компараторах с изменяемой скважностью сигналов) - требуемое значение скважности сигналов.
Программное устройство 15 (например, устройство на микропроцессоре с исходными параметрами или микроЭВМ) служит для согласования устройств 12, 11, 14, 17, а также для выработки режима работы этих устройств, зависящего от требуемых угла повышения ϑ и средней скорости движения объекта 7.
Система эталонного наведения состоит из генератора эталонного сигнала 12 и блока двойного интегрирования 13.
Предложенные варианты реализации устройств можно найти в справочнике: Справочник по средствам автоматики. П/р. В.Э.Низэ, И.В.Антика - М.: Энергоатомиздат, 1983 - [3].
Устройство работает следующим образом.
Программное устройство 15 вырабатывает управляющую программу в виде синхронных команд (сигналов):
1) четвертый выход - на переключающее устройство 14, с помощью которого отключается система балансировки 6 на время, равное 2tнмп
2) третий выход - на генератор эталонного сигнала 12 для его запуска
3) второй выход - на ключ 17, с помощью которого отключается обратная связь в системе программного наведения II (в случае использования для создания управляющего момента - грузов)
4) первый выход - на задающий генератор 11 для его запуска
С помощью этих команд генератор эталонного сигнала 12 выдает импульсный сигнал UГЭТ, показанный на Фиг.3, где tнмп определяется по формуле
где J - момент инерции объекта 7 относительно центра шарового подшипника,
ϑ з - заданный угол наведения,
Му - управляющий момент,
а задающий генератор 11 в случае управления реактивными и пропеллерными двигателями выдает такие же импульсы длительностью tнмп, как и генератор эталонного сигнала 12. В случае управления грузами задающий генератор 11 выдает импульсные сигналы (Фиг.3), определяемые в виде двух параметров - длительности импульсов tu и частоты их следования fu, которые определяются следующими соотношениями:
1) 

где  - средняя скорость движения груза (определяется приводом груза),
- средняя скорость движения груза (определяется приводом груза),
хтреб - заданное отклонение груза,
2)  (фиг.3), причем длительность отрицательного импульса равна 2tнмп, что позволяет перебросить грузы в другую сторону, а в конце режима наведения грузы возвращаются в нулевое положение.
(фиг.3), причем длительность отрицательного импульса равна 2tнмп, что позволяет перебросить грузы в другую сторону, а в конце режима наведения грузы возвращаются в нулевое положение.
Для решения задачи наведения объекта управления 7 за минимальное время используется система эталонного наведения, реализующая оптимальный по быстродействию закон управления в соответствии с принципом Л.С. Понтрягина (Понтрягин В.Г., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Математическая теория оптимальных процессов. Физматгиз, 1961) - [4]. Сигнал с системы эталонного наведения сравнивается с измерительным устройством, контролирующим угловое положение объекта управления 7, разность этих сигналов подается на следящую систему углового положения объекта управления, состоящую из блоков 8, 10, 17, 16, 9, 4, 5, 7. Одновременно на вход следящей системы подается импульсный сигнал задающего генератора 11, который в случае управления грузами является разностью двух релейных сигналов, сдвинутых по времени на tu, необходимого для разгона грузов на требуемое положение хmp. Это достигается тем, что обратная связь следящей системы размыкается, и грузы за время tu достигают программного значения хmp. При этом грузы будут создавать управляющий момент
Му=mгрgxmp(cosϑ +sinϑ ),
(Фиг.3 график Му(t)), под действием которого объект 7 будет приводиться в движение со скоростью  и ускорением
и ускорением  . По прошествии времени tн объект повернется на угол ϑ з. Причем хср выбирается таким образом, чтобы площади областей 1 и 2 были равны.
. По прошествии времени tн объект повернется на угол ϑ з. Причем хср выбирается таким образом, чтобы площади областей 1 и 2 были равны.
В случае применения РД и ПД управляющие моменты соответственно будут равны
Мр.д=F
где Fр.д. - тяга РД, Fп.д. - тяга ПД, l - плечо приложения тяги двигателей относительно центра шарового маломоментного подвеса.
Сравнение действительного движения объекта 7 с "эталоном" осуществляется посредством выработки вторым сравнивающим устройством 10 разности сигналов Uил измерительного устройства 8 и Uэт блока двойного интегрирования 13, которая в первом сравнивающем устройстве вычитается из сигнала U2 задающего генератора 11, и тем самым вынуждает объект 7 поворачиваться согласно сигналам, вырабатываемым системой эталонного наведения, обеспечивающим максимальное быстродействие и наведение объекта 7 на заданный угол:
Δ U=Uил-Uэт,
Uy=U3-Δ U.
Применение предлагаемого устройства позволит повысить точность, быстродействие наведения объекта на заданный угол повышения, а также позволит уменьшить энергопотребление.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КОЛЕС | 1991 |
|
RU2036449C1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ НА НЕСУЩЕЙ ЧАСТОТЕ | 2009 |
|
RU2396511C1 |
| Измерительный преобразователь на несущей частоте | 2022 |
|
RU2794248C1 |
| Устройство для управления вращением шпинделя балансировочного станка | 1988 |
|
SU1610339A1 |
| Автоматическая балансировочная линия | 1985 |
|
SU1272134A1 |
| Подвижная система магнитоэлектрического измерительного прибора и способ ее балансировки | 1984 |
|
SU1226315A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА КОМАНДЫ ОДНОКАНАЛЬНЫХ ВРАЩАЮЩИХСЯ РАКЕТ И СНАРЯДОВ С РЕЛЕЙНЫМ РУЛЕВЫМ ПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2574500C2 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2837059C1 |
| Балансировочное устройство | 1982 |
|
SU1054695A1 |
| Способ настройки станка для балансировки колесных пар | 1981 |
|
SU1004787A1 |
Изобретение относится к системам автоматического управления угловым положением объектов и может найти применение при создании автоматических систем управления объектов, подвешенных в гравитационном поле сил при наличии перемещающихся масс, в частности в стратосферных астростанциях при подвесе последних вблизи их центра масс. Объект 7 подвешен за центр масс и сбалансирован системой балансировки 6, управляющей грузами 1, 2, 3. Переключающее устройство 14 находится между системой балансировки 6 и балансировочными грузами 1, 2, 3 и служит для запоминания балансировочного положения этих грузов. Программное устройство присоединено к переключающему устройству 14, задающему генератору 11, ключу 17 и генератору эталонного сигнала 12 и обеспечивает их согласованную работу. Генератор эталонного сигнала 12 подает на вход блока двойного интегрирования 13 импульсный сигнал UГЭТ. Второе сравнивающее устройство 10 сравнивает сигналы от датчика 8, измеряющего угловое положение объекта 7, и от блока двойного интегрирования 13 и выдает разностный сигнал, который через ключ 17 поступает на первое сравнивающее устройство 16, на другой вход которого поступает сигнал от задающего генератора 11. Результат сравнения этих сигналов поступает на усилительно-преобразовательное устройство 9, управляющее блоком создания управляющего момента на объект III, связанным с объектом 7. Технический результат - применение предлагаемого устройства позволит повысить точность, быстродействие наведения объекта на заданный угол возвышения, а также позволит уменьшить энергопотребление. 4 з.п. ф-лы, 3 ил.
| КРАТ В.А., КОТЛЯР Л.М | |||
| Стратосферная астрономия | |||
| - Л.: Наука, 1976, с.81-87 | |||
| ДИНАМИЧЕСКИЙ СТЕНД ДЛЯ ОРИЕНТАЦИИ РАЗЛИЧНЫХ | 0 |
|
SU185097A1 |
| Система автоматического управления угловым положением летательного аппарата | 1971 |
|
SU391537A1 |
| Устройство управления угловым положением объекта регулирования | 1983 |
|
SU1117589A1 |
| Релейный способ управления угловым положением твердого тела | 1990 |
|
SU1837040A1 |
| СПУТНИК С ТРЕХОСНОЙ СТАБИЛИЗАЦИЕЙ УГЛОВОГО ПОЛОЖЕНИЯ (ВАРИАНТЫ) И СПОСОБ УПРАВЛЕНИЯ ЭТИМ СПУТНИКОМ | 1991 |
|
RU2114770C1 |
| US 5312073 А, 17.05.1994. | |||

