Изобретение относится к области автоматики авиационных силовых установок и предназначено для управления параметрами турбовинтовых двигателей летательных аппаратов с двумя соосными воздушными винтами.
Известна система автоматического управления двигателем с воздушным винтом [1], содержащая изодромный гидромеханический регулятор шага винта, задатчик частоты вращения винта, золотниково-дроссельный элемент сравнения и центробежный измеритель частоты вращения винта, причем выход центробежного измерителя частоты вращения винта соединен с первым входом золотниково-дроссельного элемента сравнения, со вторым входом которого соединен выход задатчика частоты вращения винта, а выход золотниково-дроссельного элемента сравнения соединен со входом изодромного гидромеханического регулятора шага винта. В данной системе осуществляется стабилизация частоты вращения винта nв путем изменения угла ϕ установки лопастей винта, которое производится изодромным гидромеханическим регулятором шага винта в зависимости от отклонения фактической частоты вращения винта, измеряемой с помощью центробежного измерителя, от заданной частоты вращения винта, определяемой задатчиком.
Известна система автоматического управления параметрами турбовинтового двигателя с двумя соосными винтами изменяемого шага с приводом от дифференциального редуктора [2], содержащая электромеханические датчики частот вращения переднего и заднего соосных воздушных винтов, электронные задатчики частот вращения переднего и заднего воздушных винтов, первый, второй и третий электронные элементы сравнения, первый и второй электронные изодромные регуляторы шага винта, первый и второй исполнительные механизмы изменения шага винта, дозирующее устройство, электронный изодромный регулятор расхода топлива в камеру сгорания, электронное программное задающее устройство расхода топлива в камеру сгорания двигателя. Выход электромеханического датчика частоты вращения переднего винта соединен с первым входом первого электронного элемента сравнения, со вторым входом которого соединен выход электронного задатчика частоты вращения заднего винта. Выходы первого и второго электронных элементов сравнения соединены со входами соответствующих электронных изодромных регуляторов шага винта. Выход каждого электронного изодромного регулятора шага винта соединен со входом соответствующего исполнительного механизма изменения шага винта. Выход электронного программного задающего устройства расхода топлива в камеру сгорания соединен со вторым входом третьего электронного элемента сравнения, с первым входом которого соединен выход изодромного электронного регулятора расхода топлива в камеру сгорания. Выход третьего электронного элемента сравнения соединен со входом изодромного электронного регулятора расхода топлива в камеру сгорания, выход электронного изодромного регулятора расхода топлива в камеру сгорания соединен со входом дозирующего устройства. Углы ϕn, ϕз установки лопастей переднего и заднего воздушных винтов управляются электронными изодромными регуляторами шага винта в зависимости от рассогласований между заданными и фактическими значениями частот вращения переднего и заднего воздушных винтов nвп, nвз. В этой системе осуществляется управление величиной расхода топлива Gт в камеру сгорания двигателя согласно закону Gт/Pк* = f (πк*) (где Рк* - давление воздуха за компрессором, πк* - степень сжатия воздуха в компрессоре), который формируется в электронном программном задающем устройстве расхода топлива в камеру сгорания [3]. Использование этого закона управления величиной расхода топлива Gт обеспечивает получение требуемых тяговых характеристик двигателя без нарушения прочностных ограничений и снижения надежности работы двигателя, которые вызываются одним или несколькими из следующих факторов: уменьшением запаса газодинамической устойчивости, что ограничивает максимальную величину расхода топлива Gт в камеру сгорания; жаропрочностью лопаток турбины, что ограничивает температуру газа; механической прочностью, что ограничивает допустимые превышения частотой вращения ее максимальных значений; возможностью срыва процесса горения топлива в камере сгорания, что ограничивает снизу минимальную и сверху максимальную величину расхода топлива в камеру сгорания.
Описанные выше системы обладают тем недостатком, что процессы набора и сброса мощности N в них, а также отработка внешних возмущающих воздействий, сопровождаются несогласованным изменением углов установок ϕn, ϕз лопастей винтов (в первой системе - угла установки ϕ лопастей винта) и частот вращений nвn, nвз воздушных винтов (в первой системе - частоты вращения nв винта), что приводит к существенным колебаниям тяги, развиваемой силовой установкой. Кроме того, управление тягой в описанных системах осуществляется косвенно за счет поддержания заданными других параметров двигателя, что не обеспечивает требуемой точности управления тягой в широком диапазоне изменения условий полета и режимов работы двигателя.
Наиболее близким к предлагаемому техническому решению по технической сущности является выбранная в качестве прототипа система автоматического управления параметрами турбовинтового двигателя с винтовентилятором [4], содержащая электромеханические датчики частот вращения переднего и заднего воздушных винтов, электронные задатчики частот вращений переднего и заднего воздушных винтов, первый, второй, третий, четвертый электронные элементы сравнения, первый, второй электронные изодромные регуляторы шага винта, первый, второй исполнительные механизмы изменения шага винта, электронный изодромный регулятор расхода топлива в камеру сгорания, электронное программное задающее устройство расхода топлива в камеру сгорания, электронный селектор, дозирующее устройство, электронное программное задающее устройство тяги, электронный интегратор, масштабный усилитель электрических сигналов, датчик тяги винтов, вычислитель тяги сопла, датчик давления невозмущенного потока воздуха на высоте Н, датчик температуры невозмущенного потока воздуха на высоте Н, датчик температуры заторможенного потока воздуха на высоте Н, датчик давления заторможенного потока воздуха на входе в двигатель, датчик давления заторможенного потока за компрессором, датчик скорости полета. Выход электромеханического датчика частоты вращения переднего винта соединен с инвертирующим входом первого электронного элемента сравнения, с неинвертирующим входом которого соединен выход электронного задатчика частоты вращения переднего винта. Выход электромеханического датчика частоты вращения заднего винта соединен с инвертирующим входом второго электронного элемента сравнения, с неинвертиpующим входом которого соединен выход электронного задатчика частоты вращения заднего винта. Выходы первого и второго электронных элементов сравнения соединены со входами соответствующих электронных изодромных регуляторов шага винта. Выход каждого электронного изодромного регулятора шага винта соединен со входом соответствующего исполнительного механизма изменения шага винта. Выход электронного программного задающего устройства расхода топлива в камеру сгорания соединен с неинвертирующим входом третьего электронного элемента сравнения, с инвертирующим входом которого соединен выход электронного изодромного регулятора расхода топлива в камеру сгорания. Выход третьего электронного элемента сравнения соединен со входом электронного изодромного регулятора расхода топлива в камеру сгорания. Выход датчика тяги винтов соединен с первым инвертирующим входом четвертого электронного элемента сравнения, со вторым инвертирующим входом которого соединен выход вычислителя тяги сопла, с первым входом которого соединен датчик температуры невозмущенного потока воздуха на высоте Н, со вторым входом - датчик давления невозмущенного потока воздуха на высоте Н, с третьим входом - датчик температуры заторможенного потока воздуха на высоте Н, с четвертым входом - датчик давления заторможенного потока воздуха на входе в двигатель, с пятым входом - датчик скорости полета, с шестым входом - датчик давления заторможенного потока за компрессором. Выход электронного программного задающего устройства тяги соединен с неинвертирующим входом четвертого электронного элемента сравнения, выход которого соединен со входом электронного интегратора. Выход электронного интегратора соединен со входом масштабного усилителя электрических сигналов, выход электронного изодромного регулятора расхода топлива в камеру сгорания - с первым входом электронного селектора, со вторым входом которого соединен выход масштабного усилителя электрических сигналов. Выход электронного селектора соединен со входом дозирующего устройства.
Данная система обладает тем недостатком, что в процессе сброса или набора мощности N, а также при отработке внешних возмущающих воздействий, вследствие несогласованного изменения углов установки лопастей винтов и частот вращений переднего и заднего воздушных винтов, происходят колебательные движения со значительными отклонениями указанных газодинамических параметров от заданных величин, что приводит к забросам по частотам вращения около 10% и к забросам углов установки лопастей до 20%. Это вызывает значительные до 30% колебания тяги, развиваемой силовой установкой.
Другой недостаток данной системы обусловлен тем, что вследствие функционирования используемого в ней вычислителя тяги сопла реализуется алгоритм вычисления тяги сопла Rс по упрощенным формулам, аппроксимирующим зависимость приведенной тяги сопла Rcпр от суммарной степени  повышения давления воздуха в компрессорах с постоянными коэффициентами для всех режимов работы и условий полета, что не позволяет обеспечить требования к погрешности поддержания заданного значения тяги не более 2% на всех режимах работы [2]. В данной системе [4] предусматривается расчет реактивной тяги сопла по формуле:
повышения давления воздуха в компрессорах с постоянными коэффициентами для всех режимов работы и условий полета, что не позволяет обеспечить требования к погрешности поддержания заданного значения тяги не более 2% на всех режимах работы [2]. В данной системе [4] предусматривается расчет реактивной тяги сопла по формуле:
Rc=R
 -Gв·20,05·M
-Gв·20,05·M где R
где R = -e+n
= -e+n +m
+m
l = 46,952;
m = 0,83;
n = 9,413;
δ =  причем
причем
Gв=G
 где G
где G =a+b
=a+b
a = 7,1667;
b = 0,9556.
Здесь Рн, Тн - давление и температура воздуха невозмущенного потока на высоте Н, Мn - число Маха полета, Gв - расход воздуха через двигатель, Gвпр - приведенный расход воздуха через двигатель, Рвх* - давление воздуха заторможенного потока на входе в двигатель, Тн* - температура воздуха заторможенного потока на высоте Н.
Таким образом, в прототипе требуемая точность вычисления тяги сопла может быть обеспечена лишь на расчетном и близких к расчетному установившихся режимах работы двигателя.
Необходимость обеспечения требуемой точности вычисления реактивной тяги (тяги сопла) для всех режимов работы и условий полета, несмотря на то, что она составляет 10-15% от тяги двигателя, обосновывается следующими расчетами.
Тяга двигателя складывается из тяги винтов Rв и реактивной тяги Rс:
R = Rв + Rс.
= Rв + Rс.
Погрешность управления тягой определяется следующим выражением
δ R = K1 δ Rв+K2 δ Rc , где K1=
= K1 δ Rв+K2 δ Rc , где K1=  =(0.85÷0.9); K2=
=(0.85÷0.9); K2=  =(0.1÷0.15) - коэффициенты влияния соответствующих составляющих полной тяги; δRв, δRc - погрешности измерения, соответственно, тяги винтов и тяги сопла.
=(0.1÷0.15) - коэффициенты влияния соответствующих составляющих полной тяги; δRв, δRc - погрешности измерения, соответственно, тяги винтов и тяги сопла.
Учитывая, что погрешность поддержания заданного значения тяги двигателя для всех режимов работы и условий полета двигателя не должна превышать 2%, можно записать:
δ R = K1. δRв + K2 δRc ≅ 2% Отсюда: δRc≅
= K1. δRв + K2 δRc ≅ 2% Отсюда: δRc≅ 
Так как точность измерения тяги винтов не превышает 2%, то получаем
δRс≅  ≈ (2÷3)%
≈ (2÷3)%
Цель изобретения - повышение точности управления тягой турбовинтового двигателя за счет согласованного управления его параметрами и обеспечения требуемой точности вычисления тяги сопла в широком диапазоне режимов работы двигателя и условий полета.
Поставленная цель достигается тем, что система автоматического управления параметрами турбовинтового двигателя, содержащая электромеханические датчики частот вращения переднего и заднего воздушных винтов, электронный датчики частот вращений переднего и заднего воздушных винтов, первый, второй, третий, четвертый электронные элементы сравнения, первый, второй электронные изодромные регуляторы шага винтов, электронный изодромный регулятор расхода топлива в камеру сгорания, первый, второй исполнительные механизмы изменения шага винтов, электронное программное задающее устройство расхода топлива в камеру сгорания, электронный селектор, дозирующее устройство, электронное программное задающее устройство тяги, электронный интегратор, масштабный усилитель электрических сигналов, датчик тяги винтов, вычислитель тяги сопла с пятью входами, датчик давления невозмущенного потока воздуха на высоте Н, датчик скорости полета. Выход электромеханического датчика частоты вращения переднего винта соединен с инвертирующим входом первого электронного элемента сравнения, с неинвертирующим входом которого соединен выход электронного задатчика частоты вращения переднего винта. Выход электромеханического датчика частоты вращения заднего винта соединен с инвертирующим входом второго электронного элемента сравнения, с неинвертирующим входом которого соединен выход электронного задатчика частоты вращения заднего винта. Выходы первого и второго электронных элементов сравнения соединены со входами соответствующих электронных изодромных регуляторов шага винта. Выход электронного программного задающего устройства расхода топлива в камеру сгорания соединен с неинвертирующим входом третьего электронного элемента сравнения, с инвертирующим входом которого соединен выход электронного изодромного регулятора расхода топлива в камеру сгорания, выход третьего электронного элемента сравнения соединен со входом электронного изодромного регулятора расхода топлива в камеру сгорания. Выход датчика тяги винтов соединен с первым инвертирующим входом четвертого электронного элемента сравнения, со вторым инвертирующим входом которого соединен выход вычислителя тяги сопла с пятью входами, со вторым входом которого соединен датчик давления невозмущенного потока воздуха на высоте Н. С пятым входом соединен датчик скорости полета. Выход электронного программного задающего устройства тяги соединен с неинвертирующим входом четвертого электронного элемента сравнения. Выход четвертого электронного элемента сравнения соединен со входом электронного интегратора, выход электронного интегратора - со входом масштабного усилителя электрических сигналов. Выход электронного изодромного регулятора расхода топлива в камеру сгорания соединен с первым входом электронного селектора, со вторым входом которого соединен выход масштабного усилителя электрических сигналов. Выход электронного селектора соединен со входом дозирующего устройства, в отличие от прототипа дополнительно содержит первый, второй суммирующие усилители электрических сигналов, датчик давления заторможенного потока за турбиной, датчик температуры заторможенного потока за турбиной, датчик расхода топлива в камеру сгорания. Первые входы первого и второго суммирующих усилителей электрических сигналов соединены соответственно с выходами первого и второго электронных изодромных регуляторов шага винтов. Вторые входы каждого суммирующего усилителя электрических сигналов соединены с выходом электронного интегратора. Выходы первого и второго суммирующих усилителей электрических сигналов соединены соответственно с первым и вторым исполнительными механизмами изменения шага винта. Датчик давления заторможенного потока за турбиной, датчик температуры заторможенного потока за турбиной, датчик расхода топлива в камеру сгорания соединены соответственно с первым, третьим и четвертым входами вычислителя тяги сопла. Вычислитель тяги сопла содержит первый, второй блоки деления, многоуровневый коммутатор, первый, второй, третий блоки умножения, функциональный преобразователь, реализующий операцию извлечения квадратного корня, первый, второй блоки вычитания. Первый вход вычислителя тяги сопла соединен с первым входом первого блока деления, второй вход - со вторыми входами первого блока деления, первого и второго блоков умножения, третий вход - со входом функционального преобразователя, реализующего операцию извлечения квадратного корня, четвертый вход - с инвертирующим входом первого блока вычитания, пятый вход - со вторым входом третьего блока умножения. Выход первого блока деления соединен со входом многоуровневого коммутатора. Первый и второй выходы многоуровневого коммутатора соединены соответственно с первым входом первого блока умножения и первым входом второго блока умножения. Выход второго блока умножения соединен с первым входом второго блока деления. Со вторым входом второго блока деления соединен выход функционального преобразователя, реализующего операцию извлечения квадратного корня. Выход второго блока деления соединен с неинвертирующим входом первого блока вычитания. Выход первого блока вычитания соединен с первым входом третьего блока умножения. Выход третьего блока умножения соединен с инвертирующим входом второго блока вычитания, с неинвертирующим входом которого соединен выход первого блока умножения, выход второго блока вычитания соединен с выходом вычислителя тяги сопла. Введение в систему автоматического управления параметрами турбовинтового двигателя новых элементов: первого и второго суммирующих усилителей электрических сигналов, датчика давления заторможенного потока за турбиной, датчика температуры заторможенного потока за турбиной, датчика расхода топлива в камеру сгорания, а также использование в заявляемой системе нового вычислителя тяги сопла, содержащего первый, второй блоки деления, многоуровневый коммутатор, первый, второй, третий блоки умножения, функциональный преобразователь, реализующий операцию извлечения квадратного корня, первый, второй блоки вычитания, - позволяет повысить точность управления тягой турбовинтового двигателя за счет согласованного управления его параметрами и обеспечения требуемой точности вычисления тяги сопла в широком диапазоне режимов работы двигателя и условий полета. Согласованное управление обеспечивается за счет того, что информация о процессах в газогенераторе двигателя, полученная с помощью датчиков давления и температуры заторможенного потока за турбиной, датчика давления невозмущенного потока за турбиной, датчика давления невозмущенного потока на высоте Н, датчиков расхода топлива в камеру сгорания и скорости полета, преобразуется вычислителем тяги сопла и подается через четвертый элемент сравнения и электронный интегратор не только на дозирующее устройство расхода топлива в камеру сгорания, но и, через первый и второй суммирующие усилители электрических сигналов, соответственно, на первый и второй исполнительные механизмы шага винта. Тем самым при возникновении возмущений в режиме работы газогенератора происходит изменение расхода топлива, компенсирующее данное возмущение и, кроме того, изменение углов установки лопастей воздушных винтов, компенсирующее изменение частот вращения последних, связанное с изменением крутящего момента турбины. При нарушении заданного режима работы воздушных винтов происходит не только изменение их углов установки соответствующими исполнительными механизмами, но и на основе информации, переданной датчиком тяги винтов с помощью четвертого элемента сравнения, электронного интегратора, масштабного усилителя, электронного селектора, осуществляется изменение расхода топлива в камеру сгорания. Тем самым достигается изменение вращающего момента турбины, способствующего устранению возмущений в работе воздушных винтов.
Повышение точности вычисления тяги сопла в широком диапазоне изменений условий полета и режимов работы двигателя осуществляется в предлагаемой системе за счет дополнительного измерения расхода топлива Gт в камеру сгорания, температуры газов заторможенного потока Тт* за турбиной, давление газов заторможенного потока Рт* за турбиной. Так, измерение расхода топлива Gт позволяет учесть его величину при расчете расхода воздуха Gв через двигатель, измерение давления газов заторможенного потока Рт* за турбиной позволяет обеспечить требуемую точность вычисления тяги, выделяя в зависимости от режима работы двигателя n интервалов аппроксимации газодинамических характеристик с соответствующими значениями коэффициентов аппроксимации. Измерение температуры газов заторможенного потока Тт* за турбиной позволяет учитывать при расчете расхода газа Gс через выходное сопло индивидуальные характеристики двигателя, связанные с конкретными условиями теплообмена, полноты сгорания топлива, его теплотворной способности и т.д.
В настоящее время не известны системы автоматического управления параметрами турбовинтового двигателя с аналогичными признаками. В прототипе также не используются аналогичные элементы - два суммирующих усилителя электрических сигналов, датчики давления и температуры заторможенного потока за турбиной, датчики расхода топлива в камеру сгорания и скорости полета, а также вычислитель тяги сопла, содержащий два блока деления, многоуровневый коммутатор, три блока умножения, функциональный преобразователь, реализующий операцию извлечения квадратного корня, два блока вычитания. Таким образом, заявленное техническое решение соответствует критерию "Новизна".
Известно применение суммирующих усилителей электрических сигналов, датчиков температуры, давления, расхода топлива, функциональных преобразователей, блоков умножения, деления, вычитания в системах автоматического управления силовыми установками летательных аппаратов. Однако в известных системах использование перечисленных блоков не обеспечивает эффекта, заключающегося в повышении точности управления тягой турбовинтового двигателя, во-первых, за счет согласованного управления тягой, частотами вращений и углами установки воздушных винтов двигателя, в результате чего устраняются колебания тяги в процессе набора и сброса мощности, а также при отработке внешних возмущающих воздействий, достигающие в известных системах 30%; во-вторых, за счет более высокой точности измерения тяги сопла в широком диапазоне условий полета и режимов работы двигателя. Данный эффект, т.е. новое свойство, впервые полученный в предлагаемой системе автоматического управления обусловлен, во-вторых, введением в систему автоматического управления параметрами турбовинтового двигателя с винтовентилятором [4] дополнительно первого и второго суммирующих усилителей электрических сигналов, датчиков давления и температуры заторможенного потока за турбиной, датчика расхода топлива в камеру сгорания, во-вторых, использованием в заявленной системе вычислителя тяги сопла, содержащего первый и второй блоки деления, многоуровневый коммутатор, первый, второй, третий блоки умножения, функциональный преобразователь, реализующий операцию извлечения квадратного корня, первый и второй блоки вычитания, а также образованием из них совокупности путем взаимного соединения и соединения с прототипом. Таким образом, заявленное техническое решение соответствует критерию "Изобретательский уровень".
На фиг.1 показана функциональная схема системы автоматического управления параметрами турбовинтового двигателя; на фиг.2 - функциональная схема вычислителя тяги сопла; на фиг.3 - функциональная схема исполнительного механизма изменения шага воздушного винта; на фиг.4 - функциональная схема дозирующего устройства; на фиг.5 - возможная функциональная схема датчика тяги винтов; на фиг.6 - оптимальная программа управления тягой турбовинтового двигателя; на фиг.7 - одна из возможных схем реализации программного задающего устройства тяги; на фиг.8 - возможная функциональная схема датчика давления невозмущенного потока воздуха на высоте Н; на фиг.9 - возможная принципиальная схема реализации многоуровневого коммутатора, входящего в состав функциональной схемы вычислителя тяги сопла; на фиг.10 - графики газодинамических функций, определяющих величину тяги сопла двигателя; на фиг.11 - процессы сброса мощности турбовинтовым двигателем для предлагаемой системы (кривая С) и системы, выбранной в качестве прототипа (кривая А).
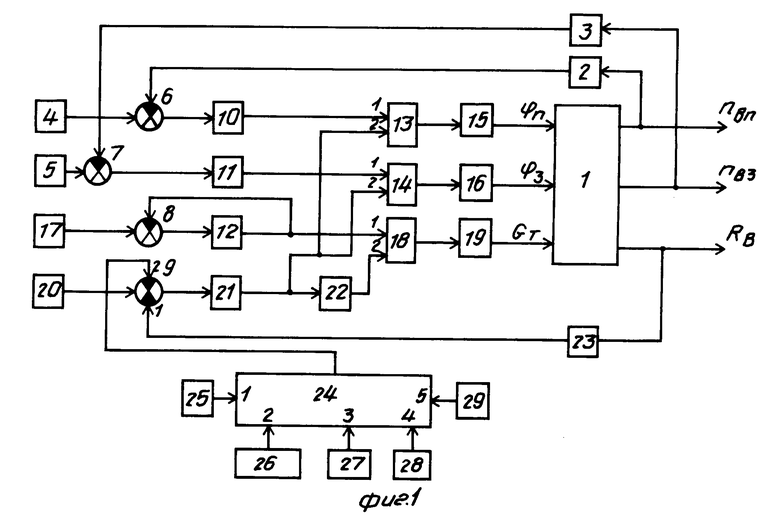
Система автоматического управления параметрами турбовинтового двигателя 1 содержит электромеханические датчики частот вращения переднего 2 и заднего 3 воздушных винтов, электронные задатчики частот вращения переднего 4 и заднего 5 воздушных винтов, первый 6, второй 7, третий 8, четвертый 9 электронные элементы сравнения, первый 10, второй 11 электронные изодромные регуляторы шага винтов, электронный изодромный регулятор 12 расхода топлива в камеру сгорания, первый 13, второй 14 суммирующие усилители электрических сигналов, первый 15, второй 16 исполнительные механизмы изменения шага винтов, электронное программное задающее устройство 17 расхода топлива в камеру сгорания, электронный селектор 18, дозирующее устройство 19, электронное программное задающее устройство 20 тяги, электронный интегратор 21, масштабный усилитель 22 электрических сигналов, датчик 23 тяги винтов, вычислитель 24 тяги сопла, датчик 25 давления заторможенного потока за турбиной, датчик 26 давления невозмущенного потока воздуха на высоте Н, датчик 27 температуры заторможенного потока за турбиной, датчик 28 расхода топлива в камеру сгорания, датчик 29 скорости полета. Выход электромеханического датчика частоты вращения 2 переднего винта соединен с инвертирующим входом первого электронного элемента сравнения 6, с неинвертирующим входом которого соединен выход электронного задатчика 4 частоты вращения переднего винта, выход датчика частоты вращения 3 заднего винта соединен с инвертирующим входом второго электронного элемента сравнения 7, с неинвертирующим входом которого соединен выход электронного задатчика 5 частоты вращения заднего винта. Выходы первого 6 и второго 7 электронных элементов сравнения соединены со входами соответственно электронных изодромных регуляторов 10 и 11 шага винтов. Выход каждого из электронных изодромных регуляторов 10 и 11 шага винтов соединен с первым входом соответствующего суммирующего усилителя 13 и 14 электрических сигналов. Выход каждого из суммирующих усилителей 13 и 14 электрических сигналов соединен со входом соответствующего исполнительного механизма 15 и 16 изменения шага винта. Выход электронного программного задающего устройства 17 расхода топлива в камеру сгорания соединен с неинвертирующим входом третьего электронного элемента сравнения 8, с инвертирующим входом которого соединен выход электронного изодромного регулятора 12 расхода топлива в камеру сгорания. Выход третьего электронного элемента сравнения 8 соединен со входом электронного изодромного регулятора 12 расхода топлива в камеру сгорания. Выход датчика тяги 23 воздушных винтов соединен с первым инвертирующим входом четвертого электронного элемента сравнения 9, со вторым инвертирующим входом которого соединен выход вычислителя тяги сопла 24, с первым входом которого соединен датчик 25 давления заторможенного потока за турбиной. Со вторым входом соединен датчик 26 давления невозмущенного потока воздуха на высоте Н, с третьим входом - датчик 27 температуры заторможенного потока за турбиной, с четвертым входом - датчик 28 расхода топлива в камеру сгорания, с пятым входом - датчик 29 скорости полета. Выход электронного программного задающего устройства 20 тяги соединен с неинвертирующим входом четвертого электронного элемента сравнения 9. Выход четвертого электронного элемента сравнения 9 соединен со входом электронного интегратора 21. Выход электронного интегратора 21 соединен со входом масштабного усилителя 22 электрических сигналов и со вторыми входами каждого из суммирующих усилителей 13 и 14 электрических сигналов. Выход электронного изодромного регулятора 12 расхода топлива в камеру сгорания соединен с первым входом электронного селектора 18, со вторым входом которого соединен выход масштабного усилителя 22 электрических сигналов. Выход электронного селектора 18 соединен со входом дозирующего устройства 19.
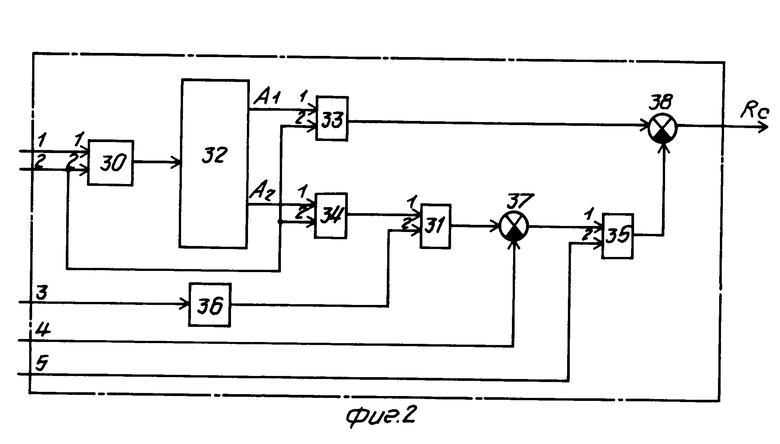
Вычислитель тяги сопла содержит два блока деления 30 и 31, многоуровневый коммутатор 32, три блока умножения 33, 34 и 35, функциональный преобразователь 36, реализующий операцию извлечения квадратного корня, два блока вычитания 37 и 38. Первый вход вычислителя тяги сопла соединен с первым входом блока деления 30, второй вход - со вторыми входами блока деления 30 и блоков умножения 33 и 34, третий вход - со входом функционального преобразователя 36, реализующего операцию извлечения квадратного корня, четвертый вход - с инвертирующим входом блока вычитания 37, пятый вход - со вторым входом блока умножения 35. Выход блока деления 30 соединен со входом многоуровневого коммутатора 32. Первый и второй выходы многоуровневого коммутатора 32 соединены с первым входом блока умножения 34. Выход блока умножения 34 соединен с первым входом блока деления 31. Со вторым входом блока деления 31 соединен выход функционального преобразователя 36, реализующего операцию извлечения квадратного корня. Выход блока деления 31 соединен с неинвертирующим входом блока вычитания 37. Выход блока вычитания 37 соединен с первым входом блока умножения 35. Выход блока умножения 35 соединен с инвертирующим входом блока вычитания 38, с неинвертирующим входом которого соединен выход блока умножения 33. Выход блока вычитания 38 соединен с выходом вычислителя тяги сопла.
В качестве электромеханических датчиков частот вращения переднего 2 и заднего 3 воздушных винтов предлагается использовать измерители частоты вращения. В качестве электронных задатчиков частот вращения переднего 4 и заднего 5 воздушных винтов возможно использование электрических потенциометрических делителей напряжения. В качестве электронного селектора 18 предлагается использовать электронные селекторы максимального уровня.
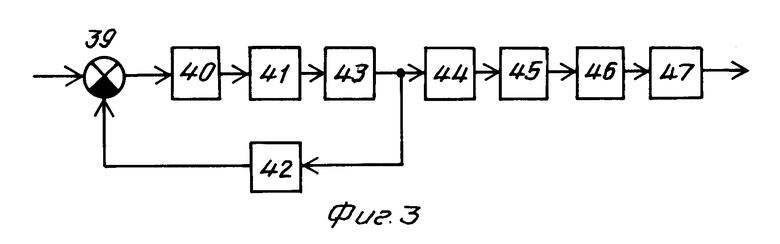
Исполнительный механизм изменения шага воздушного винта содержит электронный элемент сравнения 39, усилитель мощности 40 электрических сигналов, частотно-импульсный модулятор 41, датчик обратной связи 42, шаговый двигатель 43, червячный редуктор 44, золотник 45, силовой гидроцилиндр 46, кривошипно-шатунный механизм 47. Устройство работает следующим образом. При входном напряжении отличном от напряжения на выходе датчика 42 обратной связи, на выходе электронного элемента 39 сравнения напряжение отлично от нулевого уровня. Это напряжение, усиленное по мощности усилителем мощности 40, преобразуется частотно-импульсным модулятором 41 в последовательность импульсов, частота которых пропорциональна величине рассогласования между напряжениями, подаваемыми на входы элемента сравнения 39. Полученная последовательность импульсов подается на управляющие обмотки шагового двигателя 43 и поворачивает вал двигателя 43 до тех пор, пока сигнал рассогласования на выходе электронного элемента сравнения 39 не достигнет нулевого уровня. Червячный редуктор 44 преобразует вращательное движение вала шагового двигателя 43 в поступательное движение вала редуктора 44, с которым жестко соединен золотник 45 силового гидроцилиндра 46. Следовательно, золотник 45 займет новое положение, соответствующее величине отклонения фактического угла установки воздушного винта от заданного. В выходных магистралях силового гидроцилиндра 46 создастся разность давлений, пропорциональная величине перемещения золотника 45, которая используется для перемещения поршня кривошипно-шатунного механизма 47, поворачивающего лопасти винта. В качестве датчика 42 обратной связи возможно использование линейного вращающегося трансформатора. В данном исполнительном механизме может быть использован шаговый двигатель типа ШДР-50/1800.
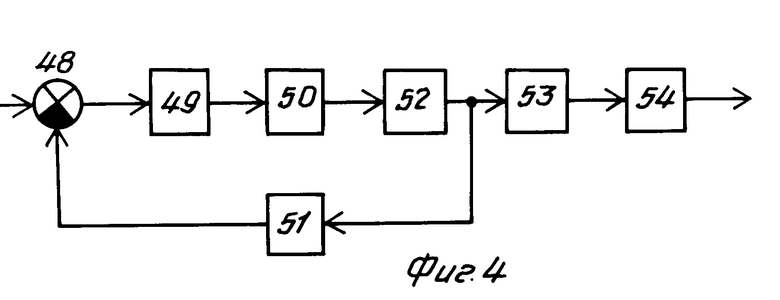
Дозирующее устройство содержит электронный элемент сравнения 48, усилитель мощности 49 электрических сигналов, частотно-импульсный модулятор 50, датчик 51 обратной связи, шаговый двигатель 52, червячный редуктор 53, дозирующую иглу 54. Принцип работы данного устройства аналогичен работе, вышеописанного исполнительного механизма изменения шага винта.
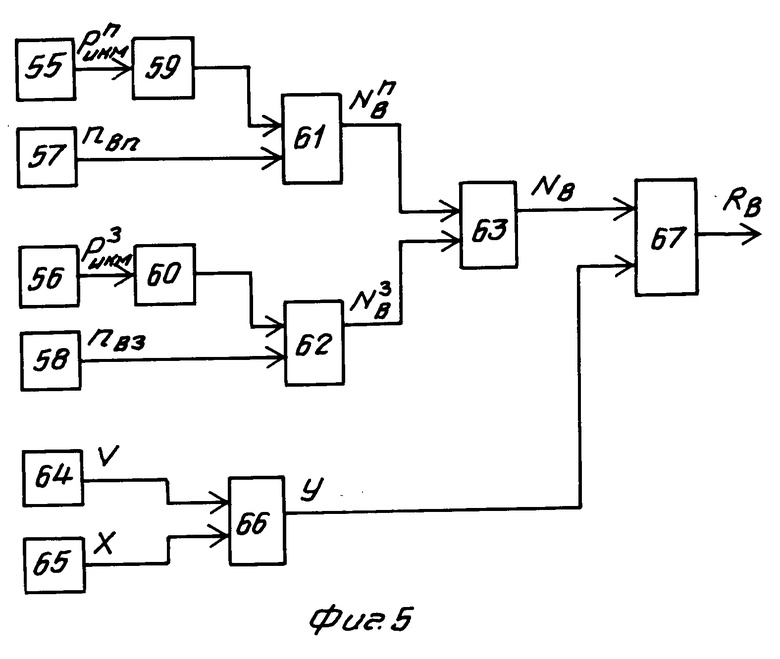
Датчик 23 тяги воздушных винтов содержит измерители крутящего момента переднего 55 и заднего 56 воздушных винтов, электромеханические датчики частот вращения переднего 57 и заднего 58 воздушных винтов, аналоговые измерительные преобразователи усиления 59 и 60 типа "Сапфир", первые 61 и второе 62 множительные устройства электрических сигналов, сумматор 63 электрического сигналов, датчик 64 скорости полета, задатчик 65 коэффициента мощности винтов, электронный селектор 66 максимального уровня, делительное устройство 67 электрических сигналов. Устройство работает следующим образом. Сигналы с измерителей 55 и 56 крутящего момента в виде давлений Рикмn, Pикмз жидкости поступают на входы соответствующих аналоговых преобразователей 59 и 60 усилия, где они преобразуются в электрические сигналы, напряжения которых пропорциональны величинам давлений на выходах измерителей 55 и 56 крутящего момента. Эти напряжения поступают на первые входы соответствующих множительных устройств 61 и 62, на вторые входы которых поступают напряжения с выходов соответствующих электромеханических датчиков 57 и 58 частот вращения переднего nвn и заднего nвз винтов. Множительные устройства 61 и 62 осуществляют умножение указанных напряжений с весовым коэффициентом КN = 0,00171458 и, следовательно, на выходе множительного устройства 61 формируется электрический сигнал, напряжение которого:
NB = KNPикмn, пропорционально величине мощности NBn, развиваемой передним винтом, а на выходе множительного устройства 62 электрический сигнал, напряжение которого пропорционально величине мощности NBЗ развиваемой задним винтом. Эти сигналы складываются в сумматоре 63 электрических сигналов и на выходе указанного сумматора формируется электрический сигнал, напряжение которого пропорционально суммарной мощности NB винтов. На первый вход электронного селектора 66 поступает напряжение электрического тока с выхода датчика 64 скорости полета пропорциональное текущей величине скорости полета. На второй вход указанного селектора поступает напряжение Х электрического тока с выхода задатчика 65 коэффициента мощности винтов, пропорциональное величине Kβ/β (где β- коэффициент мощности винтов; Кβ - нормирующий коэффициент). Селектор 66 реализует следующий закон: при скоростях полета, отличных от близких к нулевой, напряжение Y на выходе электронного селектора 66 равно напряжению на выходе датчика 64 скорости полета; при скоростях полета, близких к нулевой, напряжение Y равно величине напряжения Х, на выходе задатчика 65 коэффициента мощности винтов. Напряжение Y электрического тока поступает на второй вход делительного устройства 67, на первый вход котоого поступает напряжение, пропорциональное суммарной мощности NB винтов. На выходе указанного делительного устройства формируется напряжение, пропорциональное величине NB/Y и, следовательно, величине тяги, развиваемой воздушными винтами (5).
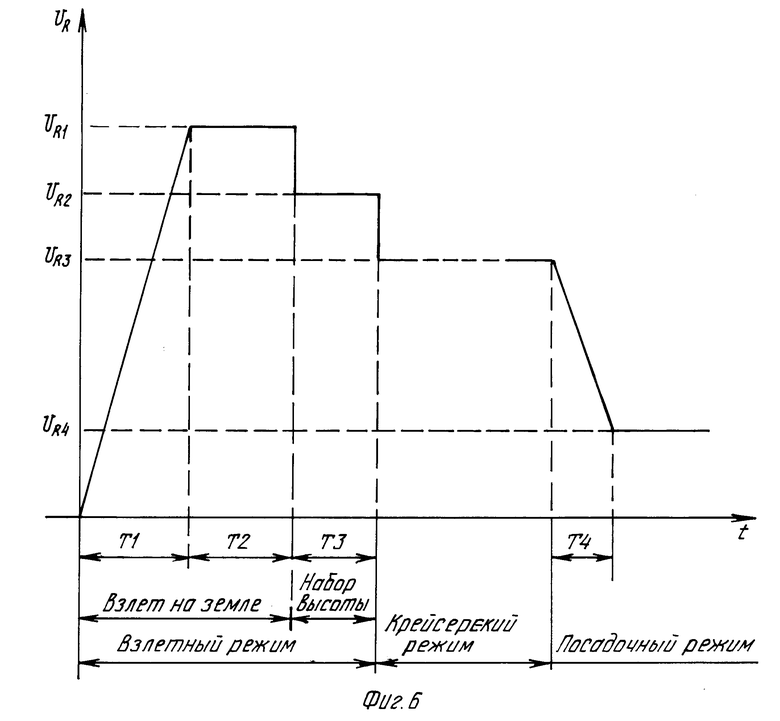
На фиг. 6 в координатах UR, t (где UR - напряжение электрического тока на выходе электронного программного задающего устройства тяги, t - ось времени) приведена оптимальная программа регулирования по тяге, создаваемой турбовинтовым двигателем. Программа реализует основные режимы работы ТВД: взлетный, крейсерский и посадочный режимы. Взлетный режим подразделяется на взлетный режим на земле и на взлетный режим при наборе высоты. Взлетный режим на земле обеспечивает разгон двигателя на высоте Н = 0. Взлетный режим при наборе высоты характеризуется обеспечением необходимой тяги при взлете. Крейсерский режим полета характеризуется созданием необходимой тяги двигателя для достижения максимальной скорости полета при минимальном расходе топлива. Посадочный режим характеризуется уменьшением тяги двигателя до минимально необходимой при посадке. Необ- ходимые величины параметров UR1, UR2, UR3, UR4, Т1, Т2, Т3, Т4 задаются в программном задающем устройстве тяги и устанавливается экипажем самолета перед полетом в зависимости от состояния аэродрома и погодных условий.
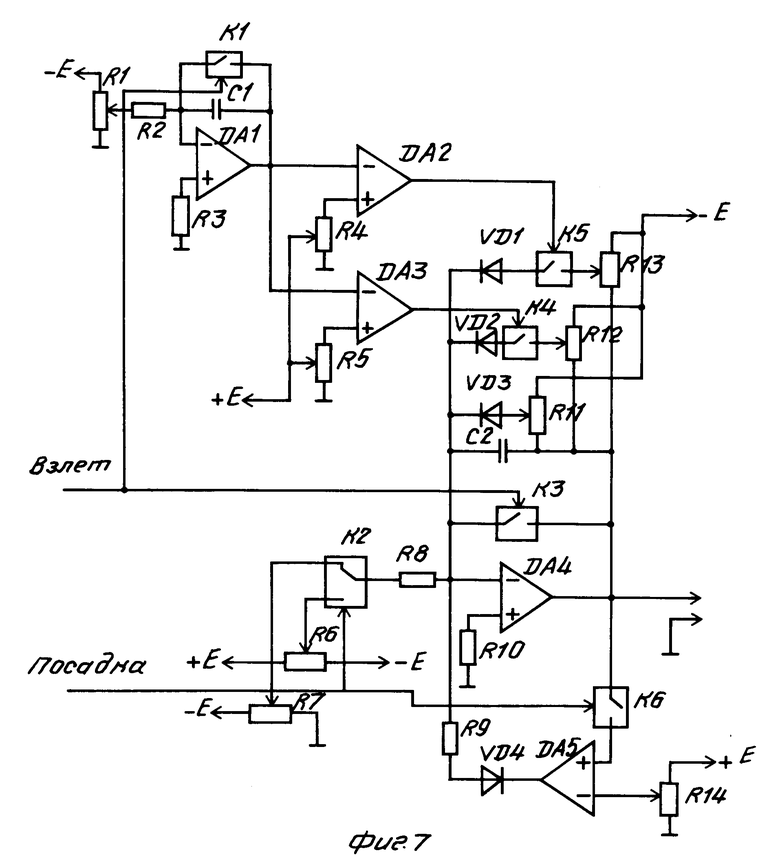
Электронное программное задающее устройство тяги содержит электронный интегратор, выполненный на элементах С2, R8, DA4, ограничители уровня выходного сигнала UR1, UR2, UR3, UR4 интегратора (ограничитель уровня UR1 выполнен на элементах VD3, R11, ограничитель уровня UR2 выполнен на элементах VD2, R12, ограничитель уровня UR3выполнен на элементах VD1, R13, ограничитель уровня UR1 выполнен на элементах DA5, VD4, R9, R14), формирователь временных интервалов, состоящий из электронного интегратора, выполненного на элементах DA1, C1, R2 и двух компараторов напряжения, выполненных на элементах DA2 и DA2. Устройство работает следующим образом. По команде летчика по линии взлета поступает сигнал запускающий электронные интеграторы на DA1 и DA4. С этого момента начинается взлетный режим и на выходе данного устройства формируется линейно нарастающее с нулевого уровня напряжение. При достижении этим напряжением уровня UR1 срабатывает ограничитель уровня UR1 и фиксирует напряжение на выходе данного устройства на уровне UR1. Через отрезок времени Т2 после момента фиксации выходного напряжения на уровне UR1 срабатывает ограничитель уровня UR2 и фиксирует выходное напряжение на указанном уровне. Через отрезок времени Т3 после момента фиксации выходного напряжения на уровне UR2 включается ограничитель уровня UR3 и фиксирует выходное напряжение данного устройства на уровне UR3. На этом заканчивается взлетный режим и начинается крейсерский, в течение которого выходное напряжение поддерживается на уровне UR3. при посадке по команде летчика по линии посадки поступает сигнал, означающий начало посадочного режима. По этому сигналу напряжение на выходе данного устройства начинает линейно уменьшаться от значения UR3 до уровня UR4, который определяется ограничителем уровня UR4. После чего напряжение на выходе устройства остается постоянным и равным UR4. В качестве датчика 25 давления заторможенного потока за турбиной, датчика 27 температуры заторможенного потока за турбиной, датчика 28 расхода топлива в камеру сгорания, датчика 29 скорости полета могут быть использованы, соответственно, манометр серии ДИМ-Т, термометр типа ТВГ, скоростной расходомер, датчик скорости полета.
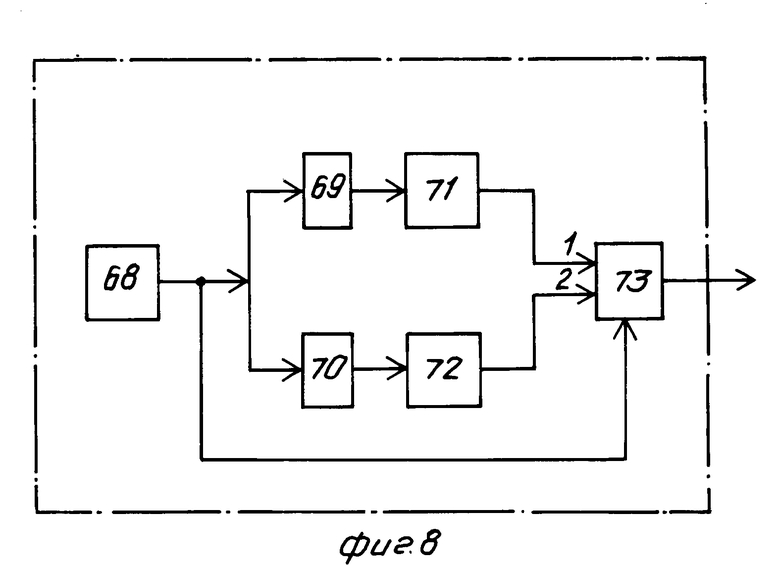
Датчик давления невозмущенного потока воздуха на высоте Н содержит датчик 68 высоты полета, дифференциальные усилители 69 и 70, функциональные преобразователи 71 и 72, электронный ключ 73. Устройство работает следующим образом. Сигнал с датчика 68 высоты полета, пропорциональный высоте полета Н, поступает на инвертирующие входы дифференциальных усилителей 69 и 70.
Дифференциальный усилитель 69 формирует на выходе электрический сигнал напряжения U1 в соответствии с формулой:
U1 = UоnI - a1 Uн, где UonI - опорное напряжение, подаваемое на неинвертирующий вход дифференциального усилителя 69, величина которого соответствует температуре То = 288 К;
а1 ≈ 0,0065 - коэффициент пропорциональности;
Uн - выходное напряжение датчика 68 высоты полета.
Дифференциальный усилитель 70 формирует на выходе электрический сигнал напряжения U2 в соответствии с формулой
U2 = UonII - a2Uн, где UonII - опорное напряжение, подаваемое на неинвертирующий вход дифференциального усилителя 70, величина которого пропорциональна отношению  ;
;
a
 - коэффициент пропорциональности.
- коэффициент пропорциональности.
Сигнал с выхода дифференциального усилителя 69 поступает на выход функционального преобразователя 71, реализующего функцию возведения в степень
U3 = a3U1в, где a
 коэффициент пропорциональности;
коэффициент пропорциональности;
b = 5,2553.
Данное напряжение поступает на первый информационный вход электронного ключа 73.
Сигнал с выхода дифференциального усилителя 70 поступает на вход функционального преобразователя 72, реализующего функцию U4 = a4eU2, где a4 ≈ 23000.
Данное напряжение поступает на второй информационный вход электронного ключа 73, на управляющий вход которого поступает напряжение Uн с выхода датчика 68 высоты полета.
При Uн ≅ Uпор, где Uпор ≈ 11 км электронный ключ 73 подает на выход напряжение U3, в противном случае - напряжение U4.
Таким образом, на выходе датчика 26 давления невозмущенного потока воздуха на высоте Н получается напряжение пропорциональное величине Рн.
Блок деления 30 и 31, блоки умножения 33, 34 и 35, функциональный преобразователь 36, реализующий операцию извлечения квадратного корня, блоки вычитания 37 и 38, используемые в вычислителе тяги сопла, элементарные компараторы, электронные ключи, применяемые в многоуровневом коммутаторе, дифференциальные усилители 69 и 70, функциональный преобразователь 71, реализующий операцию возведения в степень, функциональный преобразователь 72, реализующий операцию возведения экспоненты в степень, электронный ключ 73, используемый в датчике давления невозмущенного потока воздуха на высоте Н, - все типовые и хорошо известны. В качестве датчика 68 высоты полета, применяемого в датчике давления невозмущенного потока воздуха на высоте Н может быть использован инерциальный высотомер.
Система автоматического управления параметрами турбовинтового двигателя работает следующим образом.
На установившихся режимах работы турбовинтового двигателя частоты вращения nвп переднего и nвз заднего воздушных винтов совпадают с требуемыми значениями, которые определяются задатчиками 4 и 5 частот вращения переднего и заднего винтов, поэтому напряжения на выходах электронных элементов сравнения 6 и 7 имеют нулевой уровень. Ввиду того, что электронные изодромные регуляторы 10 и 11 шага воздушных винтов содержат в своем составе интегрирующие звенья, то при нулевом уровне напряжения на их входах, величины напряжений на выходах указанных регуляторов будут постоянными. Выходное напряжение электронного программного задающего устройства 17 расхода топлива в камеру сгорания совпадает по величине с выходным напряжением электронного изодромного регулятора 12 расхода топлива. Поэтому напряжение на выходе третьего электронного элемента сравнения будет иметь нулевой уровень. Так как указанный регулятор 12 содержит в своем составе интегрирующее звено, то при нулевом уровне напряжения на его входе, напряжение на его выходе будет иметь постоянный уровень. Кроме того, тяга двигателя R = Rв + Rс, формируемая совместно датчиком 23 тяги винтов Rв и вычиcлителем 24 тяги сопла Rс, на установившихся режимах будет совпадать с заданной, формируемой электронным программным задающим устройством 20 тяги. Поскольку в этом случае выходное напряжение электронного программного задающего устройства 20 тяги равно сумме выходных напряжений датчик 23 тяги винтов и вычислителя 25 тяги сопла, то выходное напряжение четвертого электронного элемента 9 сравнения имеет нулевой уровень. Следовательно, при нулевом уровне напряжения на входе электронного интегратора 21, выходное напряжение указанного интегратора будет иметь постоянный уровень. Коэффициент передачи масштабного усилителя 22 электрических сигналов выбирается таким образом, чтобы уровень его выходного напряжения был выше соответствующего выходного напряжения электронного изодромного регулятора 12 расхода топлива в камеру сгорания во всех тех случаях, когда управление частотами nвп, nвз вращения винтов и создаваемой ими совместно с соплом тягой R по оптимальной программе регулирования, реализуемой электронным программным задающим устройством 20 тяги, не приводит к недопустимому уменьшению запаса газодинамической устойчивости, к нарушению механических и температурных прочностных ограничений, к срыву процесса горения топлива в камере сгорания. На вход дозирующего устройства 19 электронный селектор 18 подает выходное напряжение электронного масштабного усилителя 22 электрических сигналов. Если же управление параметрами турбовинтового двигателя по программе, вырабатываемой электронным программным задающим устройством 20 тяги, приводит к нарушению прочностных ограничений и снижает надежность работы двигателя, что вызывается каким-либо из вышеперечисленных факторов, электронный селектор 18 подает на вход дозирующего устройства 19 выходное напряжение электронного изодромного регулятора 12 расхода топлива в камеру сгорания. В данной системе автоматического управления регулирование тягой будет осуществляться по программе, реализуемой электронным программным задающим устройством 17 расхода топлива в камеру сгорания, обеспечивающей заданные запасы по надежной работе двигателя.
Процессы набора или сброса мощности двигателя, а также отработка внешних возмущающих воздействий характеризуются изменением газодинамических параметров, а соответственно, и тяги двигателя во времени. На выходе датчика 23 тяги винтов формируется сигнал тяги винтов Rв, на выходе вычислителя тяги сопла 24 формируется сигнал тяги сопла Rс. Эти сигналы поступают соответственно на первый и второй инвертирующие входы четвертого электронного элемента сравнения 9. Так, если значение фактической тяги двигателя R = Rв + Rс, не совпадает со значением заданным оптимальной программой регулирования электронного программного задающего устройства 20 тяги, сигнал с которого поступает на неинвертирующий вход четвертого электронного элемента сравнения 9, то напряжение рассогласования на выходе четвертого электронного элемента сравнения 9 будет иметь величину, отличающуюся от нулевого уровня. Ввиду того, что это напряжение является входным для электронного интегратора 21, оно вызывает изменение выходного напряжения указанного интегратора. Выходное изменяющееся напряжение электронного интегратора 21 через масштабный усилитель 22 поступает на второй вход электронного селектора 18, на первый вход которого поступает напряжение с выхода электронного изодромного регулятора 12 расхода топлива.
Электронный селектор 18 из двух напряжений выбирает напряжение максимального уровня. Так, если напряжение на втором входе превышает по уровню напряжение на первом входе селектора 18, то изменяющееся выходное напряжение масштабного усилителя 22 электрических сигналов поступает на управление дозирующим устройством 19, которое перемещает дозирующую иглу пропорционально величине управляющего сигнала. Кроме того, выходное изменяющееся напряжение электронного интегратора 21 поступает через суммирующие усилители 13 и 14 электрических сигналов на управление исполнительными механизмами изменения шага винтов, которые пропорционально величине управляющего напряжения поворачивают лопасти воздушных винтов. Следовательно, одновременно с изменением величины расхода топлива в камеру сгорания меняются углы установок ϕn, ϕзлопастей воздушных винтов. Углы ϕn, ϕз и расход топлива будут изменяться до тех пор, пока фактическое значение тяги не совпадет с заданным значением. Кроме того, изменение расхода топлива и углов ϕn, ϕзустановок лопастей винтов в указанном переходном процессе вызывает отклонение частот вращений nвn, nвз от заданных. Так, если указанные процессы вызвали отклонение частот вращений nвn, nвз от частот, определяемых датчиками 4 и 5, то напряжения рассогласований на выходах первого 6 и второго 7 электронных элементов сравнения будут отличными от нулевого уровня. Ввиду того, что эти напряжения являются входными для электронных изодромных регуляторов 10 и 11 шага переднего и заднего воздушных винтов соответственно, они вызывают изменение выходных напряжений указанных регуляторов, и меняются углы ϕn, ϕз установки воздушных винтов. Углы установки воздушных винтов будут меняться до тех пор, пока значения частот nвn, nвз воздушных винтов не совпадут с заданными.
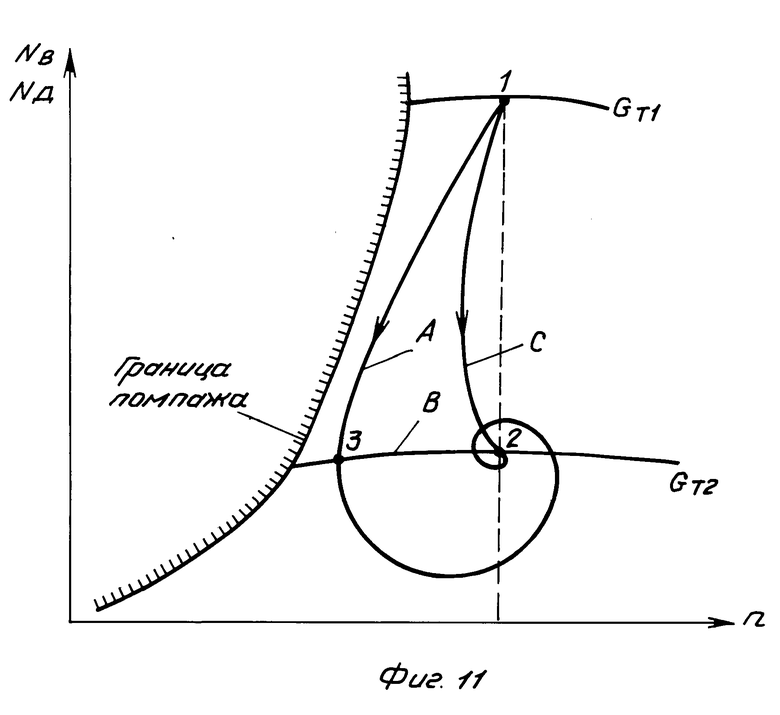
Повышение точности управления параметрами турбовинтового двигателя за счет обеспечения управления тягой по оптимальной программе в предложенной системе иллюстрируется кривой С (фиг.11). В отличие от прототипа, при быстрой уборке РУД (ручки управления двигателем) на режим малой мощности, в предложенной системе за счет управления тягой по заданной программе осуществляется согласованное управление частотами вращения n воздушных винтов и их загрузкой. Так, если произошла уборка РУД на режим малой мощности (уменьшение расхода топлива от величины Gт1до значения Gт2), то электронное программное задающее устpойство 20 тяги двигателя подает на вход четвертого электронного элемента сравнения 9 напряжение линейно спадающее от величины, соответствующей тяге двигателя, на крейсерском режиме полета летательного аппарата, до значения, соответствующего минимально необходимой тяге при посадке. Это приведет к тому, что на выходе четвертого электронного элемента сравнения 9 сигнал рассогласования будет отличен от нуля. Следовательно, на выходе электронного интегратора 21 появится изменяющееся во времени напряжение, которое будет отрабатываться исполнительными механизмами 15 и 16 изменения шага воздушных винтов и дозирующим устройством 19. Это приведет к тому, что значение фактической тяги R будет линейно уменьшаться до минимально необходимого значения по программе вырабатываемой программным задающим устройством 20 за счет согласованного управления расходом топлива в камеру сгорания (мощность двигателя Nд) и углами ϕn, ϕз установок лопастей (загрузкой воздушных винтов). Таким образом, при уменьшении расхода топлива от величины Gт1до значения Gт2, уменьшение мощности винтов сопровождается согласованным изменением углов ϕn, ϕз установок лопастей и частот nвn, nвз вращений винтов и к новому установившемуся режиму двигатель войдет без значительных колебаний по мощности Nв и тяги R двигателя.
Вычислитель тяги сопла, используемый в системе автоматического управления параметрами турбовинтового двигателя, работает следующим образом. Сигналы с датчика 25 давления заторможенного потока за турбиной и с датчика 26 давления невозмущенного потока воздуха на высоте Н пропорциональные соответственно давлению заторможенного потока за турбиной Рт* и давлению невозмущенного потока воздуха на высоте НРнпоступают в виде напряжений на соответственно первый и второй входы вычислителя тяги сопла 24. Поскольку первый и второй входы вычислителя тяги сопла 24 соединены соответственно с первым и вторым входами блока деления 30, то на его выходе формируется сигнал пропорциональный отношению давлений Рт*/Рн. В зависимости от величины напряжения этого сигнала, поступающего на вход многоуровневого коммутатора 32, на его первом и втором выходах формируются соответственно сигнал А1 и А2, уровень которых, как это следует из алгоритма работы многоуровневого коммутатора 32, оказывается пропорциональным следующим величинам:
A1 =  (1)
(1)
A2 =  (2) где Fс - эффективная площадь поперечного сечения сопла;
(2) где Fс - эффективная площадь поперечного сечения сопла;
Кг - коэффициент адиабаты для продуктов сгорания;
Rг - газовая постоянная для продуктов сгорания;
m - коэффициент, зависящий от свойств газа;
ϕс - коэффициент скорости сопла.
Сигнал А1 с первого выхода многоуровневого коммутатора 32 подается на первый вход блока умножения 33, на второй вход которого подается сигнал со второго входа вычислителя тяги сопла 24 соответствующий давлению Рн незаторможенного потока воздуха на высоте Н, в результате чего на выходе блока умножения 33 формируется сигнал пропорциональный произведению Wc. Gс скорости истечения газа из выходного сопла на массовый расход газа в последнем. Действительно:
Wc =  (3)
(3)
Gc =  (4) где Тт* - температура заторможенного потока за турбиной;
(4) где Тт* - температура заторможенного потока за турбиной;
y(λc) =  - газодинамическая функция; (5)
- газодинамическая функция; (5)
λc=ϕc˙λcид - скорость для соплового сечения, (6) где  =
=  - идеальная приведенная скорость для соплового сечения турбовинтового двигателя.
- идеальная приведенная скорость для соплового сечения турбовинтового двигателя.
(7)
Подставляя выражения (7), (6), (5) и (3) и (4) и осуществляя необходимые преобразования, получаем:
WcGc=P (8) Сопоставляя (8) c (1), имеем
(8) Сопоставляя (8) c (1), имеем
WcGc = A1 . Рн.
Таким образом, на выходе блока умножения 33 формируется сигнал А1 .Рн, пропорциональный величине WcGc.
В свою очередь сигнал А2 со второго выхода многоуровневого коммутатора 32 подается на первый вход блока умножения 34, на второй вход которого подается сигнал со второго входа вычислителя тяги сопла 24, соответствующий давлению Рн незаторможенного потока воздуха на высоте Н, а выходной сигнал блока умножения 34 подается на первый вход блока деления 31. На второй вход блока деления 31 поступает сигнал с третьего входа вычислителя тяги сопла 24, преобразованный функциональным преобразователем 35, реализующем операцию извлечения квадратного корня. Поскольку третий вход вычислителя тяги сопла 24 соединен с выходом датчика 27 температуры заторможенного потока за турбиной, то на выходе блока деления 31 формируется сигнал, пропорциональный массовому расходу газа Gс через выходное сопло. В самом деле, объединяя формулы (4), (5), (6), (7), получаем:
Gc =  ·m·F
·m·F
 ×
×
×  (9) т.е. Gc =
(9) т.е. Gc =  ·
·  (10)
(10)
Учитывая выражение (2) для А2, находим
Gc=A2·Pн/
Сигнал с выхода блока деления 31 поступает на неинвертирующий вход блока вычитания 37. Инвертирующий вход блока вычитания 37 связан с четвертым входом вычислителя тяги сопла 24, на который подается выходной сигнал датчика 28 расхода топлива в камеру сгорания, пропорциональный массовому расходу топлива Gт в камеру сгорания.
Выходной сигнал блока вычитания 37 подается на первый вход блока умножения 35, на второй вход которого подается сигнал с пятого входа вычислителя тяги сопла 24, связанного с датчиком 29 скорости полета. Таким образом, на выходе блока умножения 35 получим сигнал пропорциональный величине Wb x (Gc - Gт), который поступает на инвертирующий вход блока вычитания 38, на неинвертирующий вход которого поступает выходной сигнал блока умножения 33. Следовательно, на выходе блока вычитания 38, являющегося одновременно выходом вычислителя тяги сопла 24, формируется сигнал пропорциональный величине WcGc - Wb(Gc - Gт), что соответствует величине тяги сопла Rс турбовинтового двигателя:
Rc = WcGc - Wb (Gc - Gт).
Таким образом, на выходе вычислителя тяги сопла 24 формируется сигнал пропорциональный величине тяги сопла Rс турбовинтового двигателя.
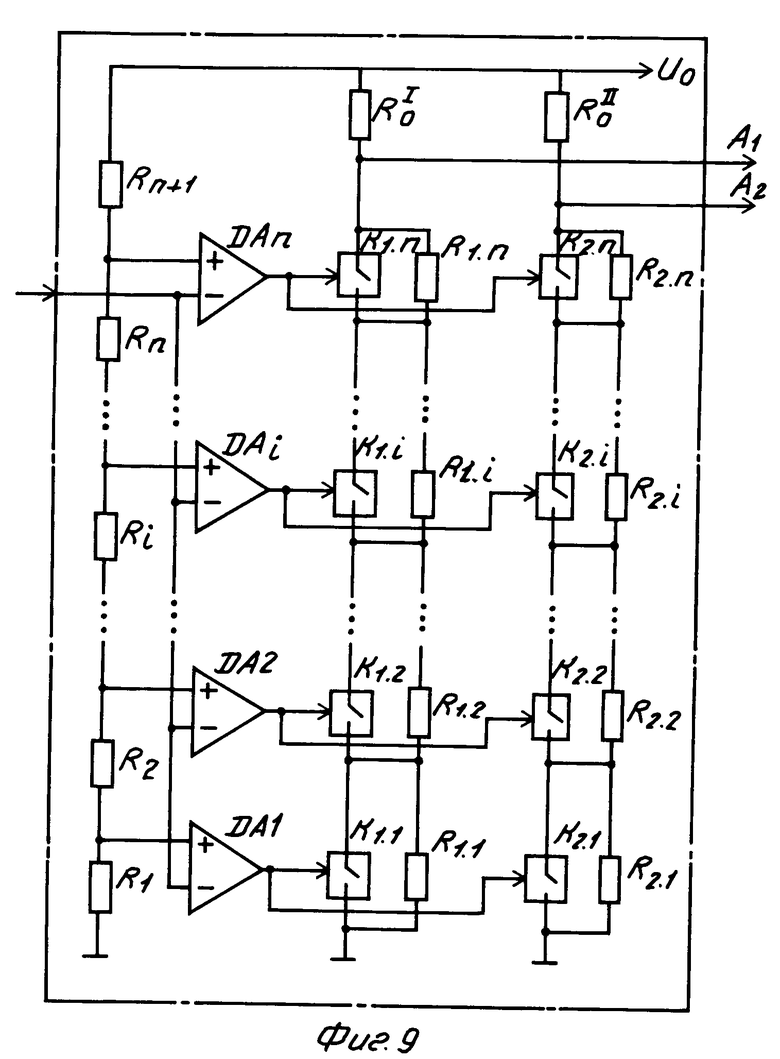
Многоуровневый коммутатор содержит компаратор уровня входного сигнала, выполненный на резисторах R1 - Rn+1 и элементарных компараторах DA1-DAn, цепочку формирования сигнала А1, выполненную на резисторах RoIи R1.1 - R1. n, коммутируемых нормально разомкнутыми электронными ключами K1.1-K1.n, цепочку формирования сигнала А2, выполненную на резисторах RoII и R2.1-R2. n, коммутируемых нормально разомкнутыми электронными ключами K2.1-K2.n, источник опорного напряжения Uо.
Данная схема работает следующим образом. Входной сигнал многоуровневого коммутатора 32, пропорциональный отношению давлений Рт*/Рн, поступает на инвертирующие входы элементарных компараторов DA1-DAn, к неинвертирующим входам которых подсоединен делитель напряжения, собранный на резисторах R1-Rn+1 и определяющий границы фиксируемых элементарными компараторами n интервалов изменения сигналов на их инвертирующих входах.
При отсутствии входного сигнала многоуровневого коммутатора 32 выходные сигналы элементарных компараторов DA1-DAn соответствуют уровню логической "1", что обеспечивает замкнутое состояние всех электронных ключей и нулевой уровень сигнала на выходах многоуровневого коммутатора 32.
Входной сигнал, соответствующий i-му интервалу Рт*/Рн вызовет срабатывание i первых элементарных компараторов DA1-DAi. Это приведет к появлению на их выходах напряжения логического "0" и, следовательно, размыканию электронных ключей K1.1-K1. i и K2.1-K2.i. Тем самым в цепочку формирования сигнала А1 будут подключены резисторы R1.1-R1.i, а также в цепочку формирования сигнала А2 будут подключены резисторы R2.1-R2.i. На выходах цепочек формирования сигналов А1 и А2, являющихся одновременно первым и вторым выходами многоуровневого коммутатора 32, сформируются сигналы A1i и A2i, напряжения которых определяются следующими соотношениями:
U Uon (11) где R
Uon (11) где R =
= 1.j,
1.j, и U
и U Uon (12) где R
Uon (12) где R =
=  R 2.j (i=
R 2.j (i= )
)
Величины сопротивлений резисторов, входящих в формулы (11), (12), выбираются таким образом, чтобы уровни сигналов А1 и А2 соответствовали значениям газодинамических функций A1=f (1) и A2=f
(1) и A2=f (2) для i-го интервала изменения величины Рт*/Рн.
(2) для i-го интервала изменения величины Рт*/Рн.
Так, полагая, что UA1i = K1. A1i, UA2i = = K2. A2i, где К1, К2 - коэффициенты пропорциональности, получаем
R1,j =  -
- R 1.l, j=1,2,...i
R 1.l, j=1,2,...i
R2,j =  -
- R 2.l, j=1,2,...i
R 2.l, j=1,2,...i
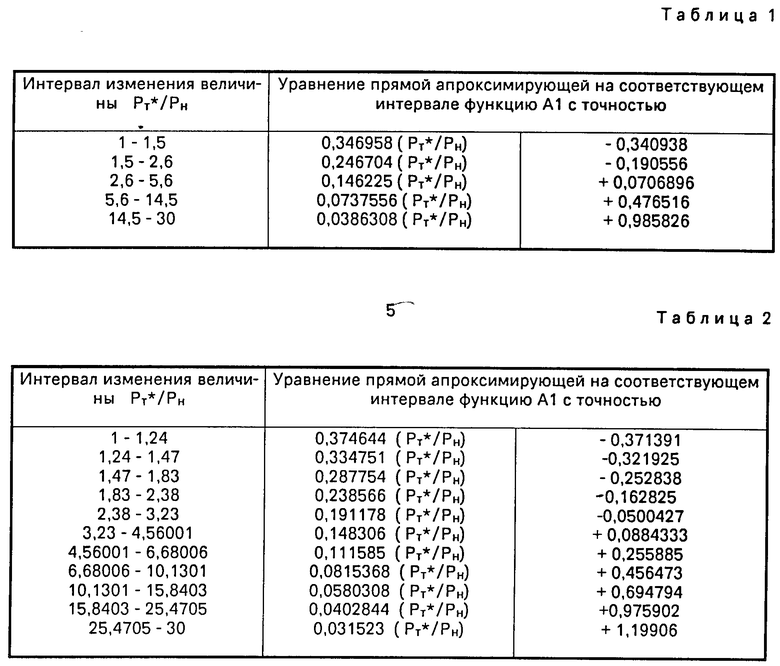
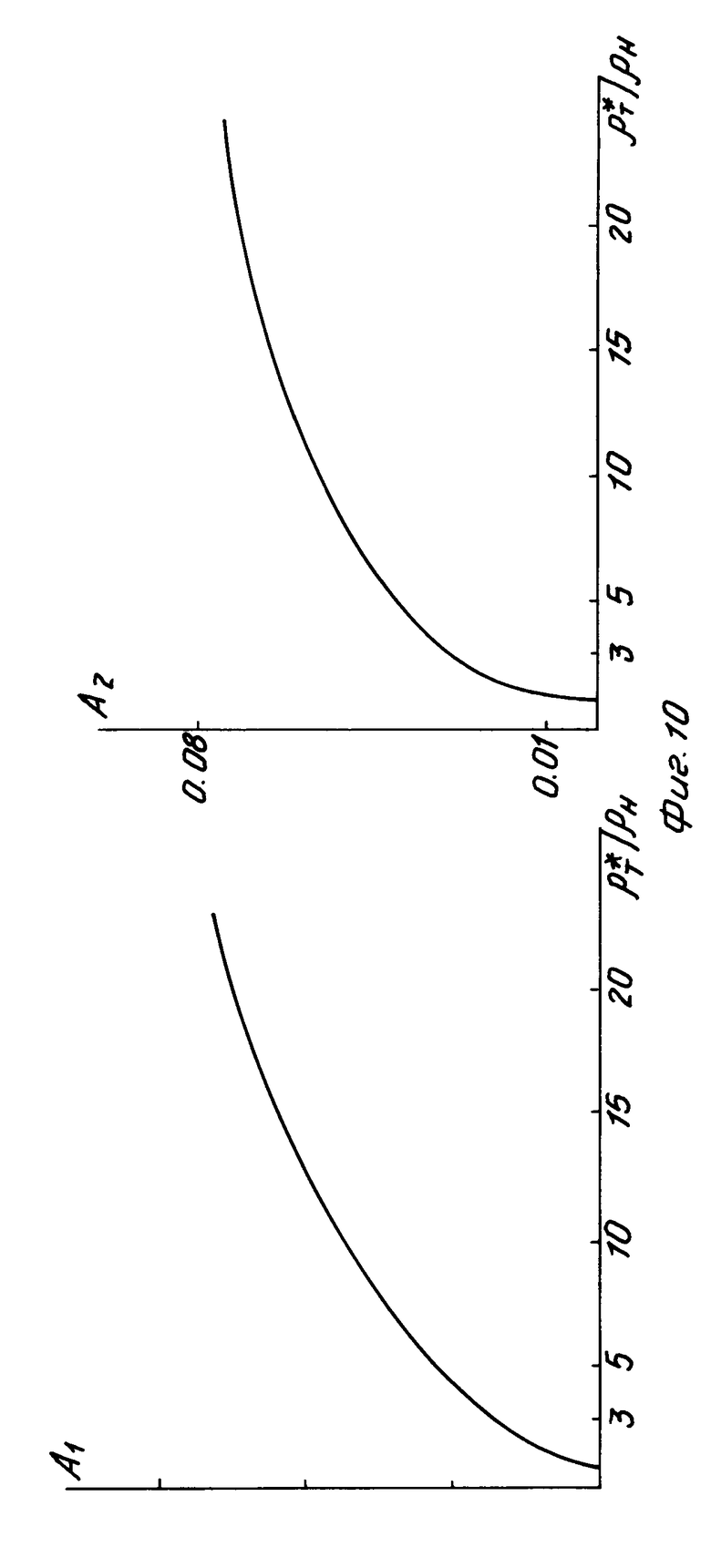
Число n и величина интервалов изменения отношения Рт*/Рнназначаются, исходя из требуемой точности аппроксимации зависимостей (1) и (2). Так, для некоторого турбовинтового двигателя, характеризующегося следующим набором параметров: Rг= 287 , ϕс= 0,98, m=0,0397
, ϕс= 0,98, m=0,0397 , Fc = 0,3 [ м3 ], газодинамические функции A1 = f(Рт*/Рн), A2 = f(Рт*/Рн) имеют вид, представленный на фиг. 10. Рассмотрим примеры определения требуемого числа n указанных параметров, исходя из заданной точности вычисления газодинамических функций А1 и А2 при их аппроксимации линейными отрезками прямых.
, Fc = 0,3 [ м3 ], газодинамические функции A1 = f(Рт*/Рн), A2 = f(Рт*/Рн) имеют вид, представленный на фиг. 10. Рассмотрим примеры определения требуемого числа n указанных параметров, исходя из заданной точности вычисления газодинамических функций А1 и А2 при их аппроксимации линейными отрезками прямых.
П р и м е р 1. Для указанного двигателя требуется точность (относительная погрешность) аппроксимации функции А1 меньше 5%. Результаты аппроксимации, удовлетворяющие указанному требованию, приведены в табл.1.
П р и м е р 2. Для того же двигателя требуемая точность аппроксимации функции А1 меньше 1% . Результаты вычислений, удовлетворяющие указанному требованию, приведены в табл.2.
Аналогично, могут быть получены результаты для функции. А2.
Таким образом, достигается любая наперед заданная точность алгоритма вычисления тяги сопла в широком диапазоне изменения условий полета и режимов работы двигателя.
Указанный алгоритм вычисления тяги сопла позволяет обеспечить высокую надежность и стабильность работы предлагаемой системы, так как: исключается выполнение промежуточных арифметических операций при непосредственном использовании для организации процедуры вычисления соответствующих формул (1), (2); как следствие, значительно упрощается диагностика возможных ошибок и их быстрое устранение; создаются условия для более простого и эффективного резервирования алгоритма; повышается быстродействие вычисления, тем самым достигается высокая достоверность управления и уменьшается перерасход ресурсов двигателя.
Таким образом, в заявленном изобретении по сравнению с прототипом достигается повышение точности управления тягой турбовинтового двигателя за счет согласованного управления его параметрами и обеспечения требуемой точности вычисления тяги сопла в широком диапазоне режимов работы двигателя и условий полета. Это позволяет уменьшить удельный расход топлива в камеру сгорания двигателя, увеличить дальность полета летательного аппарата, увеличить ресурс двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 1989 |
|
SU1642812A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТУРБОВИНТОВОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ | 1989 |
|
SU1759070A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТУРБОВИНТОВОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ | 1991 |
|
RU2006633C1 |
| Система управления двигательной установкой летательного аппарата | 1990 |
|
SU1822832A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА НИЗКОГО ДАВЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1981 |
|
SU1066265A1 |
| Устройство для измерения динамических характеристик объекта регулирования | 1984 |
|
SU1177798A2 |
| Устройство для измерения динамических характеристик объекта регулирования | 1982 |
|
SU1043600A1 |
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА В ТУРБОВИНТОВУЮ СИЛОВУЮ УСТАНОВКУ | 2006 |
|
RU2334889C2 |
| СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА ПАЛУБУ КОРАБЛЯ | 1995 |
|
RU2129971C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |
Использование: для управления параметрами турбовинтового двигателя летательных аппаратов. Сущность изобретения: в систему автоматического управления параметрами турбовинтового двигателя дополнительно введены первый и второй суммирующие усилители, датчик давления заторможенного потока за турбиной, датчик температуры заторможенного потока за турбиной, датчик расхода топлива в камеру сгорания. Вычислитель тяги сопла содержит первый и второй блоки деления, многоуровневый коммутатор, первый, второй и третий блоки умножения, функциональный преобразователь, реализующий операцию извлечения квадратного корня, первый и второй блоки вычитания. 1 з.п.ф-лы, 11 ил., 2 табл.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| ЗМКБ "Прогресс", 1988. | |||
