Изобретение относится к измерительной технике и может быть использовано для определения формы поверхности полированных подложек в электронной технике и для контроля оптических элементов.
Цель изобретения - повышение точности измерений.
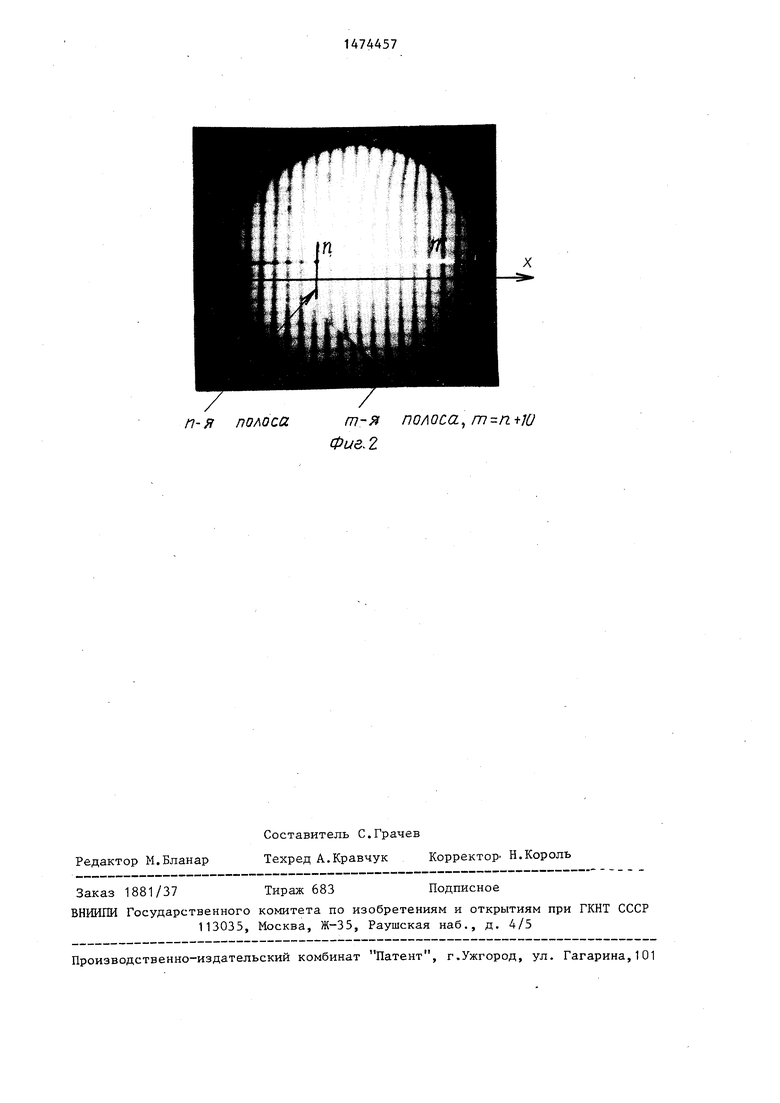
На фиг.1 приведена схема хода лучей в оптической схеме, реализующей способ определения локальной кривизны поверхности; на фиг.2 - регистрируемая система полос на контролируемой и эталонной поверхностях.
В эталонной сетке 1, освещаемой источником излучения (не показан) и расположенной вблизи фокальной плоскости 2 проекционной оптической системы (объектива) 3, каждое отверстие представляет собой точечный источник излучения. Луч света, вышедший из точки А, прошедший через объектив 3 в точке В, отразившийся от поверхности эталонной поверхности 4 в точке В , и прошедший тем же путем обратно в точку А, имеет максимальную интенсивность по сравнению с другими лучами, которые, отразившись от зоны, окружающей точку В1, попадут на обратном пути на непроз- разные участки сетки 1, окружающие точку А.
Таким образом, возникает система светлых и темных полос, видимых на фоне эталонной поверхности 4 и контролируемой поверхности 5, причем при двойном прохождении через отверстие сетки 1 лучей света, идущих к поверхности 4 и отраженных от нее, сетка пропускает обратно лишь те лучи, которые совпадают с направлением нормалей к поверхности.
Пусть плоскость О В - плоская эталонная поверхность. Поскольку рассматриваются лучи, идущие по нормали к поверхности, то для плоской эталонной поверхности 4 все отраженные лучи должны сходиться в фокусе объектива 3 в точке F.
На фиг.1 обозначены регистрируемая (п+2)-я полоса 6, видимая на фоне контролируемой поверхности 5; полоса 7, видимая на фоне поверхнос-
4 (на данной схеме может быть
ти
ности 5, регистрируемая n-я полоса 9, видимая на фоне поверхности 5. Из подобия треугольников FAD и FBO получают
FD AD
FO
ов
где - шаг сетки 1;
- фокусное расстояние объектива 3;
- расстояние между сосед- °в
ними полосами на эталонной поверхности 4, образованными лучами В BAF и
О ODF,
т.е.
FD
р zr
. I т,1
Расстояние О В ОВ в силу малости отрезка 00.
Пусть поверхность О С - контролируемая поверхность 5 подложки с неизвестным радиусом кривизны R
ос
Лу
чи, идущие по нормали к поверхности О С1, собираются в точке Е на оптической оси объектива 3, причем расстояние FE определяется по формуле Ньютона
FE
,-l-.Ј2
R0t
Из подобия треугольников EAD и ЕСО получают -- (по аналогии
X
ос
с эталонной поверхностью).
Затем FE FD-ED, или -1f f R°C
р iр -Ј
Хов Хос
1 f
(1)
Прохождение луча из точки А в точку В, т.е. из одного отверстия сетки 1 в другое при отражении от поверхности 5, дает еще один максимум интенсивности, приходящийся на середину выше рассмотренных полос ОБ - на поверхности 4 и ОС - на поверхности 5. Это означает, что
Хоь 2-хзп, Хос Х« пПодставляя в формулу (1), получают
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения фокусного расстояния объективов и устройство для его реализации | 1982 |
|
SU1080054A1 |
| СПОСОБ ИНТЕРФЕРОМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2237865C2 |
| Способ измерения толщины стенки прозрачных труб и устройство для его осуществления | 1988 |
|
SU1522029A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СВЕТОРАССЕЯНИЯ ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2007 |
|
RU2329475C1 |
| ЛИНЗА ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧЕНИЯ | 2017 |
|
RU2692405C2 |
| СПОСОБ ИНТЕРФЕРОМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2263279C2 |
| СКАНИРУЮЩИЙ ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2002 |
|
RU2264595C2 |
| ОТОБРАЖАЮЩИЙ ФОКАЛЬНЫЙ СПЕКТРОМЕТР (ВАРИАНТЫ) | 2009 |
|
RU2397457C1 |
| Устройство и способ для обнаружения оптических дефектов деталей конструкционной оптики | 2021 |
|
RU2789204C1 |
| Интерферометр для контроля формы асферических поверхностей | 1985 |
|
SU1295211A1 |
Изобретение относится к измерительной технике и может быть использовано для определения формы поверхности полированных подложек в электронной технике и для контроля оптических элементов. Цель изобретения - повышение точности измерений за счет обеспечения помехозащищенности. При освещении эталонной сетки 1, расположенной вблизи фокальной плоскости 2 объектива 3, на плоской эталонной и контролируемой поверхностях 4,5 формируются системы светлых и темных полос. Измеряют расстояние между узловыми точками, образованными пересечением полос, видимых на фоне контролируемой и эталонной поверхностей, и определяют кривизну контролируемой поверхности по формуле 1/RNM=P/2F(1/Xэт- @ N-M @ /XNM), где N, M - порядковые номера узловых точек, образованных пересечением полос, видимых на фоне контролируемой поверхности
RNM - радиус кривизны контролируемой поверхности, определяемый на участке между точками N и M
XNM - расстояние между узловыми точками N и M
Х00эт - расстояние между соседними узловыми точками, образованными пересечением полос, видимых на фоне эталонной плоской поверхности
P - шаг эталонной сетки
F - фокусное расстояние объектива. Способ позволяет оперативно получить числовую характеристику кривизны поверхности объекта или ее части, что обеспечивает повышение точности измерений. 2 ил.
зарегистрирована при отсутствии подложки) регистрируемая (п+1)-я полоса 8, видимая на фоне поверх1
-а.и
Р
гТ
1
(п+2)-п
X
X
п +2,п
).
Обобщая получают
JL (1 Iszsl
R-- 2f Хэт Xnrr)
где
hm П, Ш
),(2)
R
1№
X,
X
зт
порядковые номера узловых точек, образованных пересечением полос, видимых на фоне контролируемой поверхности 5; радиус кривизны контролируемой поверхности 5, определяемый на участке между контролируемыми точками пит; расстояние между узловыми точками пит; расстояние между соседними узловыми точками, образованными пересечением полос, видимых на фоне эталонной плоской поверхности 4.
Меняя положение сетки 1 относително фокальной плоскости объектива 3, т.е. перемещая отрезок AD вдоль линии FO, можно менять расстояние между полосами, наблюдаемыми на фоне как контролируемой поверхности 5, так и эталонной поверхности 4, при этом для каждой ячейки сетки 1 всегда найдется выходящий из нее луч, который на выходе из объектива 3 образует нормаль с поверхностью 4 или 5. Изменяя расстояние между полосами, меняют локальность проводимых измерений.
На фиг.2 представлена наблюдаемая картина полос, видимых на фоне контролируемой поверхности (справа) и эталона (слева, сверху и внизу)„
Отсчитывают, например, по 10 полос на каждой из поверхностей, измеряют расстояние между ними, а затем по формуле (2) находят искомый радиус кривизны контролируемой поверхности 5.
Способ позволяет оперативно получить числовую характеристику кривизны поверхности объекта или ее части,
1474457
что обеспечивает измерений.
повышение точности
Формула изобретения
Способ определения локальной кривизны поверхности, заключающийся в том, что освещают эталонную сетку,проецируют ее изображение на контролируемую поверхность и регистрируют полученное изображение, отличающийся тем, что, с целью повышения точности измерений, в плоскости расположения контролируемой поверхности размещают эталонную плоскую поверхность, проецируют изображение эталонной сетки поочередно или одновременно на эталонную и контролируемую поверхности, измеряют расстояние между узловыми точками, образованными пересечением полос, видимых на фоне контролируемой и эталонной поверхностей, и определяют кривизну контролируемой поверхности по формуле
Р / 1 In -ml
2f (X
9m
X
0,
nni
5
0
p f
0 где п, m - порядковые номера узловых точек, образованных пересечением полос, видимых на фоне контролируемой поверхности; шаг эталонной сетки; фокусное расстояние проекционной оптической системы;
-Пт радиус кривизны контролируемой поверхности, определяемый на участке между точками пит;
-ЛГУ, расстояние между узловыми точками п и та;
5 х-эт расстояние между соседними узловыми точками, образованными пересечением полос, видимых на фоне эталонной плоской поверхности.
R
X
п- я полоса
т-я полоса, т-п+ю Фиг. 2
Редактор М.Бланар
Составитель С.Грачев
Техред А.Кравчук Корректор Н.Король
Заказ 1881/37
Тираж 683
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г.Ужгород, ул. Гагарина,101
Подписное
| Оптический производственный контроль./Под ред.Д.Малахары | |||
| М.: Машиностроение, 1985, с.197-206. |
