30
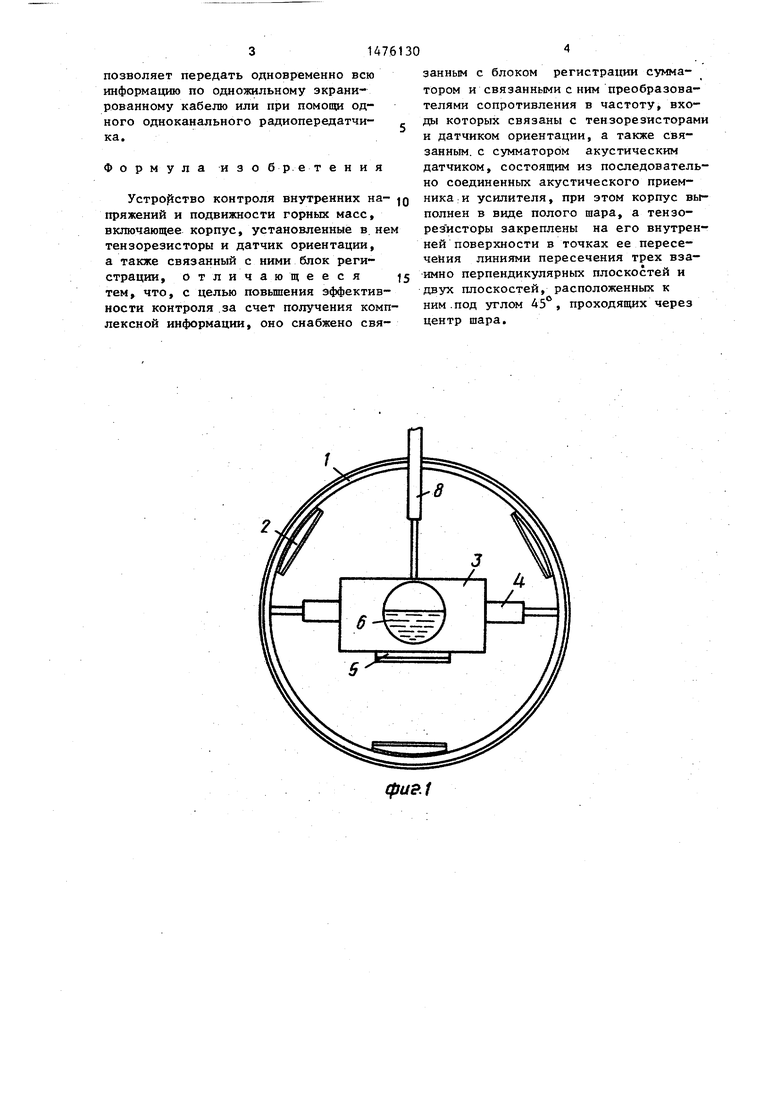
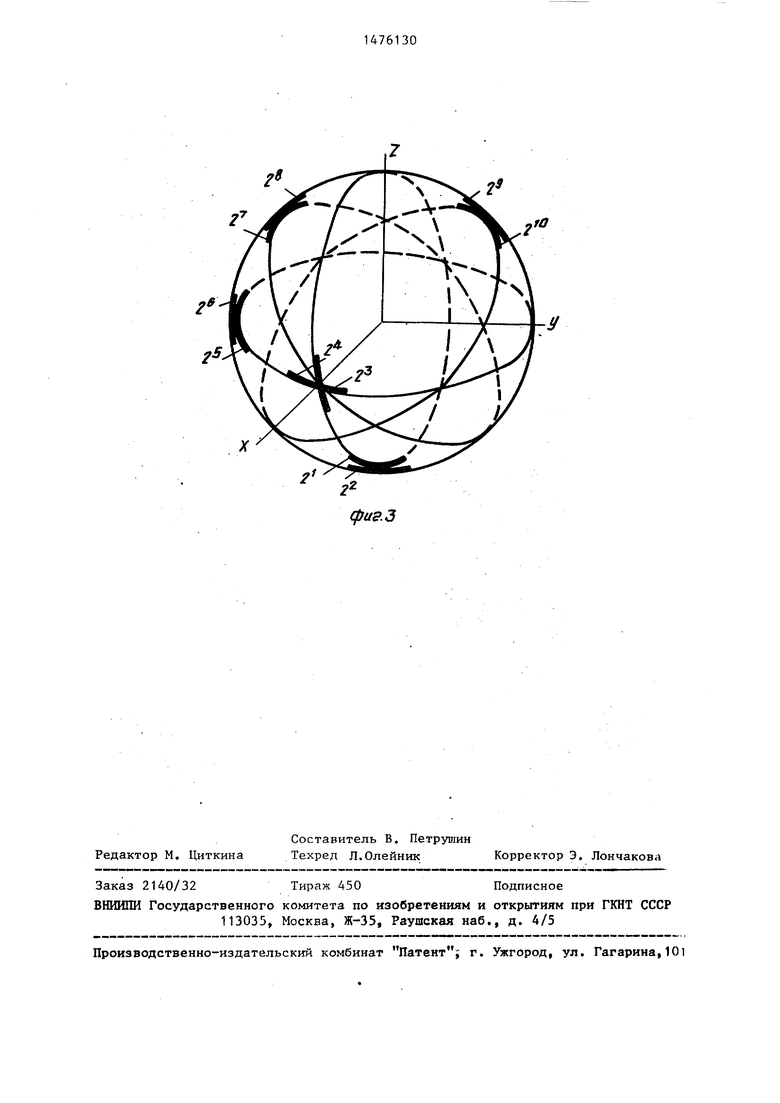
резисторы 2 в точках пересечения сфе- 20 элементу 11 и преобразуются последним рической поверхности линиями пересечения трех взаимно перпендикулярных плоскостей и двух плоскостей, расположенных с ним под углом 45°, проходящих через центр шара, плату 3 для установки датчиков, телескопические штанги 4 для крепления платы 3 в корпусе 1, акустический датчик 5 и датчик 6 ориентации в пространстве, установленные на плате 3, выносное регистрирующее устройство 7 и средство 8 для передачи сигнала, например коаксиальный бронированный кабель, преобразователи 9 сопротивления в частоту, связанные с тензорезистора- 35 ми 2 и датчиком 6 ориентации в пространстве, сумматором 10 входы которого связаны с преобразователями 9 сопротивления в частоту и акустическим датчиком 5, а выход - с выносным регистрирующим устройством 7. Акустический датчик 5 состоит из соединенных последовательно акустического приемника-пьезоэлемента 11 и усилителя 12.
Устройство работает следующим образом.
Корпус 1, помещенный в контролируемую среду, например воронку обрушения,
в электрический сигнал. Сигнал пьезо- элемента 11 усиливается усилителем 12 с ограниченной полосой пропускания (на уровне 3-5 кГц) и поступает
25 на вход сумматора 10. На другие входы сумматора поступают сигналы преобразователей 9. Выход сумматора 10 подключен к коаксиальному бронированному кабелю средства 8 для передачи сиг-, нала, по которому передается суммарный сигнал, спектр которого содержит ограниченный спектр акустических колебаний и частоты, соответствующие значениям сопротивлений тензорезис- торов 2 и датчика 6 ориентации в пространстве. По кабелю 8 также осуществляется питание элементов датчика. При использовании для передачи сигналов радиосвязи выход сумматора 10 подключается к модулятору радиопередатчика. При этом питание элементов тензорезисторов 2 и датчиков 6 ориентации и акустического 5 производится от автономного источника. Сум45 марный сигнал устройства, несущий
комплексную информацию о напряжениях, воздействующих на него, об ориентации устройства в пространстве и перемещении породы передается в регистри40
испытывает давление окружающей горнойзд рующее устройство 7, где демодулирумассы. Деформация металлической оболочки корпуса 1 преобразуется тензоре- зисторами 2 в соответствующее активное сопротивление последних, которое затем преобразуется в электрический гармо- 55 нический, сигнал преобразователями 9 сопротивления в частоту. Частота сигнала определяется значением сопротивления тензорезистора 2 и элеменется на составляющие.
Гармоническая форма представления сигналов датчика 6 ориентации и тензорезисторов 2 на различных частотах исключает взаимное влияние сигналов и обеспечивает их качественное разделение полосовыми фильтрами в регистрирующем устройстве при обработке и представлении сигналов контроля,
элементу 11 и преобразуются последним
в электрический сигнал. Сигнал пьезо- элемента 11 усиливается усилителем 12 с ограниченной полосой пропускания (на уровне 3-5 кГц) и поступает
на вход сумматора 10. На другие входы сумматора поступают сигналы преобразователей 9. Выход сумматора 10 подключен к коаксиальному бронированному кабелю средства 8 для передачи сиг-, нала, по которому передается суммарный сигнал, спектр которого содержит ограниченный спектр акустических колебаний и частоты, соответствующие значениям сопротивлений тензорезис- торов 2 и датчика 6 ориентации в пространстве. По кабелю 8 также осуществляется питание элементов датчика. При использовании для передачи сигналов радиосвязи выход сумматора 10 подключается к модулятору радиопередатчика. При этом питание элементов тензорезисторов 2 и датчиков 6 ориентации и акустического 5 производится от автономного источника. Суммарный сигнал устройства, несущий
комплексную информацию о напряжениях, воздействующих на него, об ориентации устройства в пространстве и перемещении породы передается в регистри
рующее устройство 7, где демодулируется на составляющие.
Гармоническая форма представления сигналов датчика 6 ориентации и тензорезисторов 2 на различных частотах исключает взаимное влияние сигналов и обеспечивает их качественное разделение полосовыми фильтрами в регистрирующем устройстве при обработке и представлении сигналов контроля
позволяет передать одновременно всю информацию по одножильному экранированному кабелю или при помощи одного одноканального радиопередатчи- ка.
Формула изобретения
Устройство контроля внутренних на- JQ пряжений и подвижности горных масс, включающее корпус, установленные в нем тензорезисторы и датчик ориентации, а также связанный с ними блок регистрации, отличающееся 15 тем, что, с целью повышения эффективности контроля за счет получения комплексной информации, оно снабжено связанным с блоком регистрации сумматором и связанными с ним преобразователями сопротивления в частоту, входы которых связаны с тензорезисторами и датчиком ориентации, а также связанным с сумматором акустическим датчиком, состоящим из последовательно соединенных акустического приемника и усилителя, при этом корпус выполнен в виде полого шара, а тензорезисторы закреплены на его внутренней поверхности в точках ее пересечения линиями пересечения трех взаимно перпендикулярных плоскостей и двух плоскостей, расположенных к ним под углом 45°, проходящих через центр шара.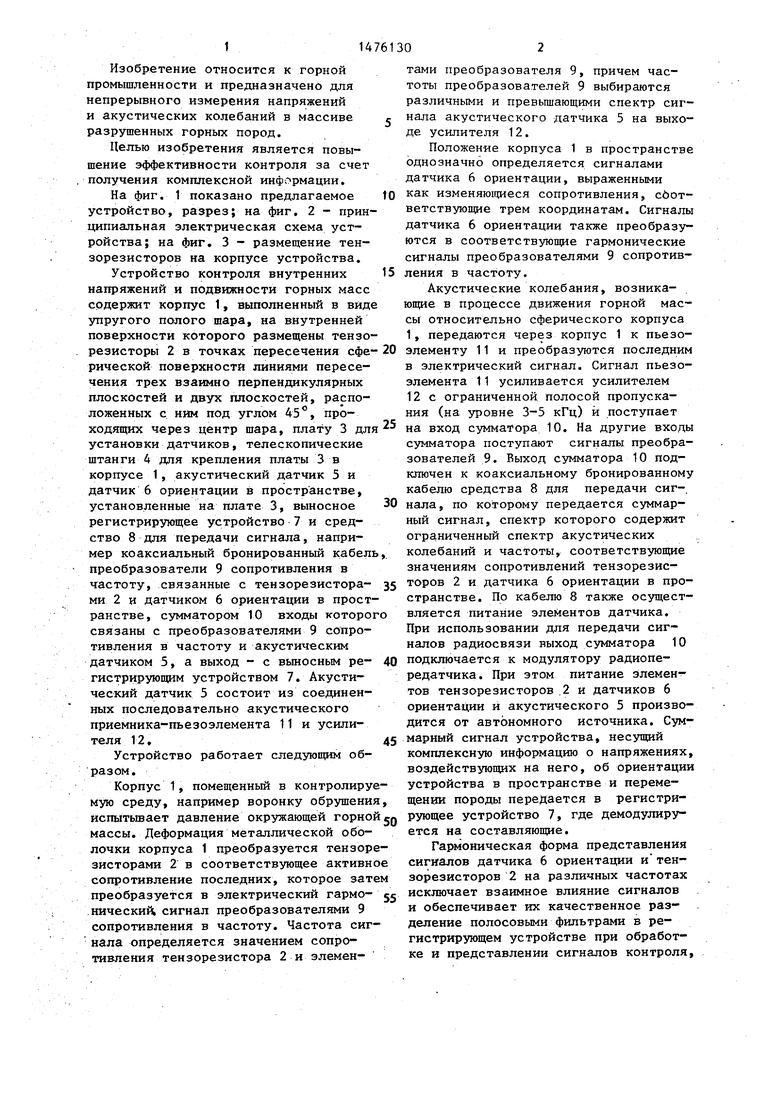
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ПРОТИВОТРАНСПОРТНЫХ МИН | 2001 |
|
RU2212712C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПРОТИВОТРАНСПОРТНЫХ МИН | 2011 |
|
RU2447509C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ПРОТИВОТРАНСПОРТНЫХ МИН | 2001 |
|
RU2213999C2 |
| ПЛАСТОВЫЙ НАКЛОНОМЕР | 1970 |
|
SU273451A1 |
| Устройство имитации условий движения транспортного средства для тренажера | 1990 |
|
SU1798810A2 |
| Устройство для измерения давления | 1987 |
|
SU1490515A1 |
| Устройство для ранней диагностики образования и развития микротрещин в деталях машин и конструкциях | 2022 |
|
RU2788311C1 |
| Устройство для ввода рукописной информации | 1987 |
|
SU1411790A1 |
| Способ геоакустического исследования скважин в процессе бурения | 1984 |
|
SU1385114A1 |
| Устройство для ориентации сейсмоприемников в скважинах | 1982 |
|
SU1124236A1 |
Изобретение относится к горной промышленности и предназначено для непрерывного измерения напряжений и акустических колебаний в массиве разрушенных горных пород. Цель изобретения - повышение эффективности контроля за счет получения комплексной информации. Устройство содержит корпус 1, выполненный в виде полого шара, на внутренней поверхности корпуса 1 закреплены тензорезисторы 2, расположенные в точках пересечения поверхности линиями пересечения трех взаимно перпендикулярных плоскостей и двух, расположенных к ним под углом 45°. В корпусе 1 установлены акустический датчик /АД/ 5, состоящий из соединенных последовательно акустического приемника-пьезоэлемента 11 и усилителя 12, и датчик ориентации в пространстве /ДОП/ 6. С тензорезисторами 2 и ДОП 6 связаны последовательно преобразователи сопротивления в частоту /ПСЧ/ 9 , сумматор 10 и блок 7 регистрации. При деформации корпуса 1 сигнал с тензорезисторов 2 поступает в ПСЧ 9. Сигнал положения в пространстве с ДОП 6 поступает в ПСЧ 9. Акустические колебания сдвижения пород воспринимаются АД 5. Сигналы с АД 5 и ПСЧ 9 в виде гармонических колебаний поступают в сумматор 10, затем в блок 7 регистрации, где демодулируются на составляющие. Передача нескольких сигналов одновременно в виде суммы гармоник возможна по одножильному экранированному кабелю или при помощи одноканального радиопередатчика. 4 ил.
tpuat
/
г7
2
| Устройство для измерения глубинных деформаций горных пород | 1972 |
|
SU487234A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Глубинный деформометр | 1983 |
|
SU1105644A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
