4. 1
со со о ю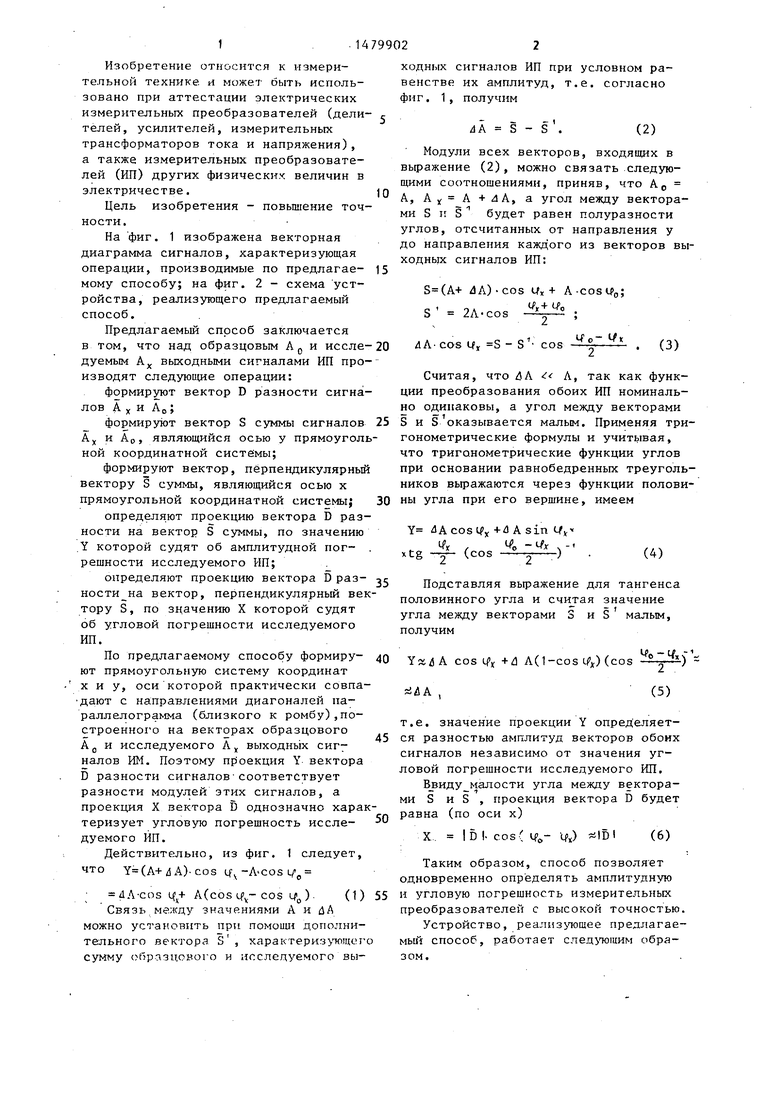
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения частотных погрешностей масштабных преобразователей | 1986 |
|
SU1370591A1 |
| Устройство для измерения параметров пассивного комплексного двухполюсника | 1983 |
|
SU1244598A1 |
| Устройство для измерения параметров пассивного комплексного двухполюсника многополюсной электрической цепи (его варианты) | 1982 |
|
SU1250983A1 |
| Способ измерения величин состав-ляющиХ КОМплЕКСНОгО СОпРОТиВлЕНиядВуХпОлюСНиКА | 1976 |
|
SU819745A1 |
| Первичный измерительный преобразователь вектора скорости течения | 1987 |
|
SU1812502A1 |
| Способ определения двухэлементной схемы замещения двухполюсника и устройства для их осуществления (его варианты) | 1983 |
|
SU1176254A1 |
| Устройство для измерения параметров нерезонансных двухполюсников | 1982 |
|
SU1250984A1 |
| Способ преобразования отношения синфазной (квадратурной) составляющей информационного гармонического сигнала к опорному гармоническому сигналу (его варианты) | 1980 |
|
SU951155A1 |
| Способ определения квадранта местоположения намагниченного тела | 1987 |
|
SU1430900A1 |
| Способ допускового контроля одной из составляющих измеряемого комплексного сопротивления (проводимости) двухполюсника | 1980 |
|
SU892316A1 |
Изобретение относится к измерительной технике. Цель изобретения - повышение точности. Способ осуществляют следующим образом. Формируют с помощью блока 4 вычитания и сумматора 5 векторы разности и суммы сигналов исследуемого и образцового измерительных преобразователей 3 и 2 и вектор, перпендикулярный вектору суммы. Затем определяют значения проекций вектора разности на вектор суммы и перпендикулярный ему вектор и по этим значениям судят о погрешностях измерительного преобразователя 3. 2 ил.
фи&.2
Изобретение относится к пзмери- теаьной технике и может быть использовано при аттестации электрических измерительных преобразователей (дели- телей, усилителей, измерительных трансформаторов тока и напряжения), а также измерительных преобразователей (ИП) других физических величин в электричестве.Ю
Цель изобретения - повышение точности.
На фиг. 1 изображена векторная диаграмма сигналов, характеризующая операции, производимые по предлагав- 1 мому способу; на фиг. 2 - схема устройства, реализующего предлагаемый способ.
Предлагаемый способ заключается в том, что над образцовым А0 и иссле-2 дуемым Ах выходными сигналами ИП производят следующие операции:
формируют вектор D разности сигналов А х и А0;
формируют вектор S суммы сигналов 2 Ах и АО, являющийся осью у прямоугольной координатной системы;
формируют вектор, перпендикулярный вектору S суммы, являющийся осью х прямоугольной координатной системы; 3
определяют проекцию вектора D разности на вектор S суммы, по значению Y которой судят об амплитудной пог- . решности исследуемого ИП;
определяют проекцию вектора D раз- , ности на вектор, перпендикулярный вектору S, по значению X которой судят об угловой погрешности исследуемого ИП.
По предлагаемому способу формиру- 4 ют прямоугольную систему координат х и у, оси которой практически совпа- дают с направлениями диагоналей параллелограмма (близкого к ромбу),построенного на векторах образцового А0 и исследуемого А „ выходных сигналов ИМ. Поэтому проекция Y вектора D разности сигналов соответствует разности модулей этих сигналов, а проекция X вектора D однозначно характеризует угловую погрешность иссле- 5 дуемого ИП.
Действительно, из фиг. 1 следует, что Y(A+dA)-cos ify-A-cos i/0
ДА-со5 (J+ A(cos cos W0 ) (1) 5 Связь между значениями А и ДА можно установить при помощи дополнительного вектора S , харакгеризующего сумму образцово о и исследуемого вы4
ходных сигналов ИП при условном равенстве их амплитуд, т.е. согласно фиг. 1, получим
4А S - S ,
(2)
Модули всех векторов, входящих в выражение (2), можно связать следующими соотношениями, приняв, что А0 А, А у А + 4А, а угол между векторами S и S л будет равен полуразности углов, отсчитанных от направления у до направления каждого из векторов выходных сигналов ИП:
S(A+ & A) -cos tfx + A-cosu 0;
. О)
ДА- cos S - S1 cos
Считая, что и А Ј А, так как функции преобразования обоих ИП номинально одинаковы, а угол между векторами S и S оказывается малым. Применяя тригонометрические формулы и учитывая, что тригонометрические функции углов при основании равнобедренных треугольников выражаются через функции половины угла при его вершине, имеем
ДА +й A sin с/к
MV
f , Ч Чх - (cos
-)
(4)
Подставляя выражение для тангенса половинного угла и считая значение угла между векторами 3 и S малым, получим
Yxd A cos 4V +d A(1-cos U) (cos
idA
2 (5)
т.е. значение проекции Y определяется разностью амплитуд векторов обоих сигналов независимо от значения угловой погрешности исследуемого ИП.
Ввиду малости угла между векторами S и S , проекция вектора D будет равна (по оси х)
X ID cos( ip0- Л D1 (6)
Таким образом, способ позволяет одновременно определять амплитудную и угловую погрешность измерительных преобразователей с высокой точностью.
Устройство, реализующее предлагаемый способ, работает следующим образом.
Редактор А. Ревин
Составитель А. Старостина
Техред М.Ходанич Корректор Т. Малец
Заказ 2540/45
Тираж 714
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
| Любимов Л.И., Форсилова И.Д | |||
| Поверка средств электрических измерений | |||
| Л.: Энергия, 1979, с | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
