Изобретение относится к измерительной технике и может быть использовано для определения вектора скорости течения (ВС7) в геомагнитной системе координат, в измерителях скорости течения, где учет ориентации устройства позволяет вычислить широтную и меридиональную составляющие ВСТ.
Целью изобретения является повышение информативности за счет возможности определения направления течения непосредственно в геомагнитной системе координат.
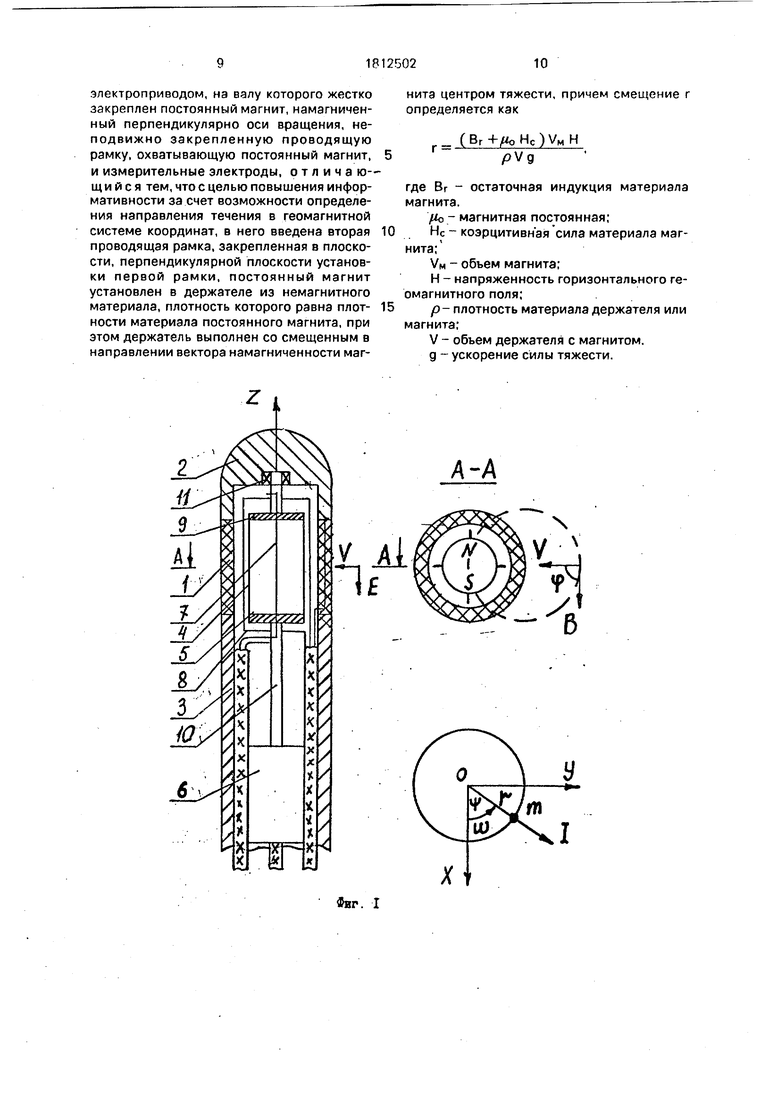
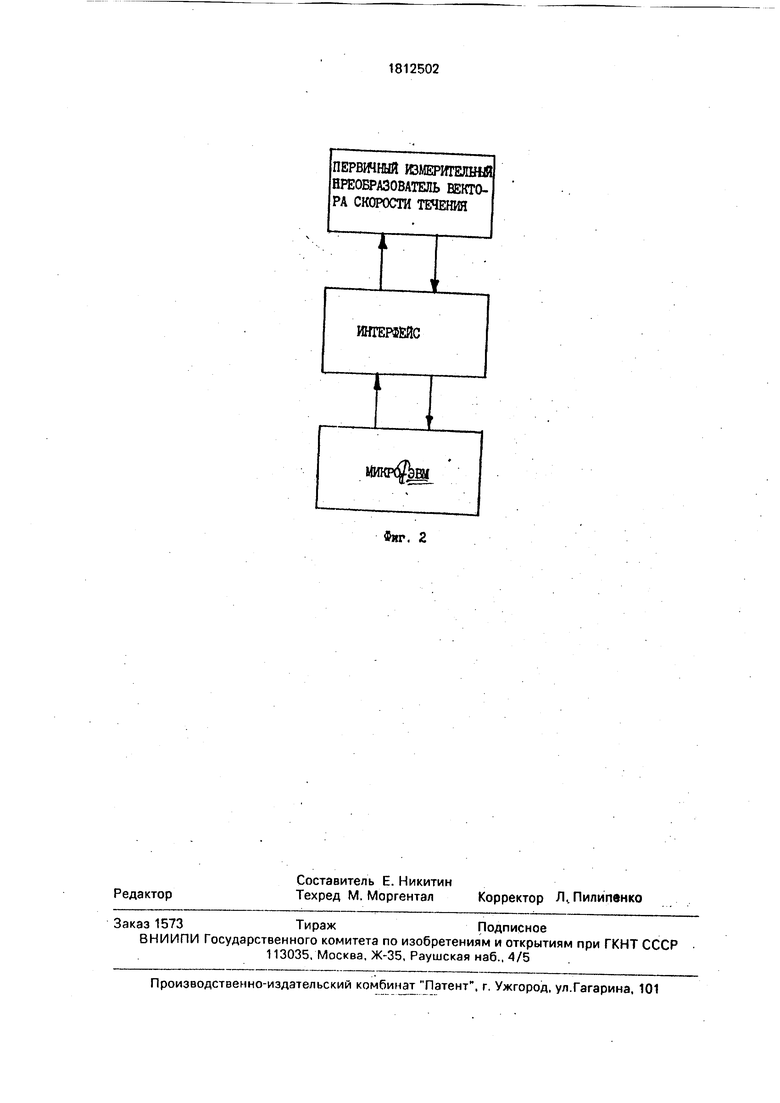
На фиг. 1 схематично изображен один из возможных вариантов выполнения предлагаемого первичного измерительного преобразователя; на фиг. 2 показана схема его включения в устройство для определения вектора скорости течения.
Первичный измерительный преобразователь содержит корпус 1, измерительные электроды 2, 3, держатель 4, постоянный магнит 5, привод 6, рамки 7, 8.
Для обеспечения заданной разрешающей способности по ориентации (около 1°) каждая рамка 7, 8 содержит по 100 витков провода ПЭВ-2 диаметром 0,05 мм, выбранным из условия минимального сечения обмотки и удобства намотки. Обмотки расположены в пазах цилиндрического каркаса из органического стекла (на фиг. не показан), внутри которого находится держатель 4, выполненный в виде тонкостенного латунного цилиндрического стакана с основанием и крышкой 9 (тонкие боковые стенки стакана на фиг. не показаны). Вал 10 привода 6, на котором жестко закреплен держатель 4, проходит через отверстия в каркасе
00
ю ел о
го
обмотки к немагнитному подшипнику 11, закрепленному на внутренней поверхности электрода 2.
Постоянный магнит 5 выполнен самарий-кобальтового сплава в форме цилиндра, например, диаметром 20 мм и высотой 40 мм, вклеенного внутрь стакана держателя 4. Магнит намагничен по радиусу цилиндра, перпендикулярно оси его вращения. Цилиндрический магнит 4 позволяет получить правильную гармоническую форму сигнала с рамок 7, 8, что особенно важно, поскольку об изменении ориентации преобразователя судят по изменению формы сигнала с рамки за счет углового ускорения.
Электроды 2, 3 выполнены из титана или немагнитного, не подверженного влиянию морской воды сплава. Электроды 2, 3 закреплены на корпусе 1 и охватывают верхний и нижний торцы цилиндрического магнита 5 по окружностям, расположенным в перпендикулярных оси вращения плоскостях этих торцов.
Корпус 1 представляет собой цилиндр из изоляционного материала, например из компаунда, и соединен с электродами 2, 3 так, что образуется герметичная оболочка обтекаемой формы.
Вывод от электрода 2 проходит сквозь корпус 1 в плоскости рамки 8 для компенсации возможной квадратурной помехи.
Привод 6 представляет собой, например, электродвигатель переменного тока с немагнитным ротором и статором из магни- томягкого материала, не содержащим постоянные магниты. Привод должен быть удален от магнита 5 на определенное расстояние, с тем чтобы снизить момент сопротивления от взаимодействия магнита и магнитомягкого материала двигателя. Удаление от магнита должно составлять не менее 5 см. Это расстояние определяют экспериментально с учетом момента трения немагнитного подшипника 11 и сопротивле- ния воздуха вращению держателя 4, выполнен из латуни, немагнитного материала, имеющего такую же плотность, как и материал магнита 5 (самарий-кобальтовый сплав).
Держатель 4 выполнен со смещением его центра тяжести относительно оси вращения 10. Величину смещения центра тяжести держателя 4 определяют из условия приблизительного равенства (в пределах одного порядка величин) моментов от геомагнитного поля и силы тяжести, что позволяет различить эти моменты на фоне друг друга в заданном диапазоне измерений.
Смещение центра тяжести держателя 4 производят в направлении вектора намагниченности магнита 5, например, путем сверления отверстий в основании держателя 4 или в крышке 9 (отверстия на фиг. 1 не показаны) параллельно вектору магнитной
индукции.
Устройство работает следующим образом.
С помощью электродвигателя 7 магнит 5 с держателем 4 приводится во вращение
относительно оси вала 10 с частотой 10-30 Гц. Выбор этой частоты обусловлен стремлением к исключению поляризационных процессов на измерительных электродах и верхней частотой исследуемых процессов.
Вращающийся магнит5 создает магнитное поле с вектором индукции В, которое взаимодействует с потоком электропроводящей жидкости, движущимся в плоскости XV со скоростью v, что вызывает электрическое поле с вектором напряженности Е BXv, которое, в свою очередь, вызывает напряжение U на электродах 2,3:
25
U - KEI sin (p,
(2)
где I 40 мм - расстояние между электродами, соответствующее высоте магнита 5;
К - экспериментальный коэффициент, определяемый при градуировке и учитываю- щий концевые токи;
ф- угол между векторами В и v.
Из выражения (6) при р 90°
Ivl
макс KBI
(3)
Направление v относительно рамок 7 и 8 определяется по соответствующей разности фаз сигналов с измерительных электродов и одной из рамок, т.к. момент двигателя (10 н.м.) значительно больше измеряемых моментов и отклонения формы сигналов от гармонической практически не наблюдается.
При наличии квадратурной помехи она устраняется с помощью фазового детектора, подключаемого к измерительным электродам, или путем вычитания сигнала с опорной рамки, э плоскости которой лежат
выводы от измерительных электродов, из сигнала с измерительных электродов в соответствующем масштабе. Масштаб выбирается из равенства нулю сигнала с измерительных электродов в отсутствие скорости течения.
Затем электропривод б отключают для исключения реакции привода из измерительного уравнения, т.к. зависимость момента привода от скорости вращения (механическая характеристика) зависит от
многих факторов и носит по существу эмпирический характер.
Далее по измеренным ранее напряжениям Ux, Uy с опорных рамок 7, 8 для четырех положений вектора намагниченности, определяемых по пересечению им этих рамок для углов 0°, 90°, 180°, 270°, определяют значения угловой скорости (а для этих углов. Затем дифференцированием получают значение (Ь для углов # 0°, 90°, 180°,
А В
mrgy + IHy ;mrgx + fHx
(6)
(7)
10
Мсопр - const для данной ориентации устройства в течение одного оборота магнита;
дх,9у, Их, Ну - проекции силы тяжести и напряженности геомагнитного поля на оси X и Y связанной системы координат преобразователя.
Запишем выражение (5) для чр 0°, 90°,
270° и составляют четыре измерительных 180 , 270 , т.е. для моментов пересечения
(6)
(7)
Мсопр - const для данной ориентации устройства в течение одного оборота магнита;
дх,9у, Их, Ну - проекции силы тяжести и напряженности геомагнитного поля на оси X и Y связанной системы координат преобразователя.
Запишем выражение (5) для чр 0°, 90°,
Использование: измерительная техника, определение вектора скорости течения в геомагнитной системе координат. Сущность: преобразователь содержит корпус с установленным в нем электроприводом, на валу которого закреплен постоянный магнит, намагниченный перпендикулярно оси вращения, две взаимно перпендикулярные неподвижно закрепленные проводящие рамки. Постоянный магнит закреплен в держателе из немагнитного материала, имеющего плотность, равную плотности материала постоянного магнита. Держатель имеет смещенный в направлении вектора намагниченности постоянного магнита центр тяжести. 2 ил.
уравнения, где неизвестными являются углы наклона и направления наклона, а также момент трения. Из этих уравнений определяют углы наклона и направления наклона оси вращения магнита, которые полностью определяюториентацию преобразователя в геомагнитной системе координат и позволяют пересчитать ранее измеренный вектор скорости течения в системе координат пре- образователя в геомагнитную систему.
Измерительное уравнение в случае отключения привода имеет вид:
(10 + mr2} У (mrgy 1НУ)cosif)-imrgx +
+ IHx)sinVV
где 1о - момент инерции магнита с держателем без смещения центра тяжести держателя;
m - суммарная масса магнита и держателя;
г - смещение центра тяжести магнита и держателя относительно оси вращения;
«у-угловое ускорение вращения магнита с держателем ;
9х, 9у - проекции ускорения свободного падения на оси X, Y связанной системы координат преобразователя;
Нх, Ну - проекции напряженности геомагнитного поля на оси X, Y связанной системы координат преобразователя;
1р.- УГОЛ отклонения вектора намагниченности постоянного магнита от оси X связанной системы координат преобразователя.
Перепишем выражение (4) в виде
I U A COS Sin 1р- Мсопр.
где I - приведенный момент инерции держателя с магнитом:
вектором намагниченности плоскости опорных рамок, которые фиксируются по нулево- -му сигналу с одной из опорных рамок.
(8)
(9)
(10)
(11)
1520
25
Из выражений (8)....(11):
A(ftb )
Р((И27о- Оэо) 2
В
(12)
(13)
Угловая скорость (О для этих углов вычисляется по сигналам с опорных рамок, измеренным приборами с высоким входным сопротивлением 10-100 МОм. В момент времени, когда Uy О,
35
0)
U BS
(14)в момент времени, когда Ux О
со
Ц, BS
(15)
50
где В - индукция постоянного магнита 5; -..... S - площадь рамки 7, 8. 45 Угловое ускорение Ф может быть получено дифференцированием угловой скорости.
Обозначим геомагнитную систему коор- динат:ось направлена на север, ось вертикально вверх, ось | на восток.
Для пересчета Н , Нл , 9- в систему координат воспользуемся таблицей направляющих косинусов.
71812502 f 8
где а- угол наклона оси вращения Z;где п 100 - число витков рамки;
Д- угол направления наклона. ТогдаВ 0,2 Тл - индукция постоянного Магнита,
Hx-HbSlna-H- со$ a sin Д(16) угловое ускорение; ...... 5 Мтах 510 н.м, - максимальный гео- Ну Н. cosa+H.slnasIn (17) магнитный момент;
. I 5,4 10 ° кг-м - момент инерции де- gx -gcosaslnЈ (18) ржателя с магнитом;
д - угбл между вектором намагниченно- fy g slnasln/3(19) Ю сти и вектором напряженности геомагнит ного поля; Преобразуя (16) и (18), получим . Аб-приращение этого угла.
Подставляя указанные значения и пре- A (mrg + IH )sinasln#+Hs cosa (20). образуя выражение (26), получим .;.
B -(mrg + IH4)cosastn +H sina (21)до 1i6. 10..2 s}n АЈ.С08(5 )Из выражений(20)и(21)следует: ;
Для До .выраженного в радианах, яолsln/8 20 -
A-Htcosq; HfcSln«-B. А0 1,6-10-3cbs(5 + 4)в7рад. mrg+IH sina (m rg+1Н, )cos« Дд 2
(22) 25Таким образом, при минимальной чувИз выражения (22):ствительности с одной рамки имеет место
.- .максимальная чувствительность с другой
Acosa+Bsina IH.,(23) рамки.
В случае автономного устройства значеотсюда- 30 ния U9, Ux, Uy заносятся в запоминающее
RIH н-vVвlнлVг-fA 4.ягirl нl .. ytf ройство или р .помощью микроЭВМ рас-. singu 81 ( )(i )считываются М,Ј, а, Д либо широтная vm
. z. , Nл и меридиональная Vm составляющие v, что
Значение и уточняют путем пОдстанов-позволяет вместо девяти значений за цикл
ки в (20), (21), (22), (23).35 измерений запирывать соответственно чеИтак, работа устройства заключается втыре или два значения.
следующем:В случае непосредственной связи с
Гц .информации для коррекции возможных сбо2. Измеряют и запоминают иэ и Ux (или40 ев, векторное осреднение в зависимости от
yy)tчастоты процесса, использование других
2информативностью, т.к. позволяет опредемер, через время .т - jлять ориентацию преобразователя в геомагЧувствительность устройства по скоро-нитной системе координат без введения
сти течения составляет:дополнительного ориентирующего устрой .-.. 50 ства. Это позволяет снизить габариты, вес,
U пкп оппл- А 1/г3 а/ / пглэнергопотребление погружаемого устройст- KBI г-0,5 0,2 0,04-410 В/м/с U5)ва включающего преобразователь вектора
скорости течения.
Чувствительность устройства по,углу за
время действия ускорения Лт 10с при- 55 Формул а изо б ре тения близительно определится из выражения
.Мтах л,г / j-A/sv- Первичный измерительный преобразо- . й Дг пВ5-j-Дт 8 п() + До)- ватель вектора скорости течения, содержа-sin 5,(26) Щий корпус с установленным в нем
электроприводом, на валу которого жестко закреплен постоянный магнит, намагниченный перпендикулярно оси вращения, неподвижно закрепленную проводящую рамку, охватывающую постоянный магнит, и измерительные электроды, о т л и ч а ю- щ и и с я тем, что с целью повышения информативности за счет возможности определения направления течения в геомагнитной системе координат, в него введена вторая проводящая рамка,закрепленная в плоскости, перпендикулярной плоскости установки первой рамки, постоянный магнит установлен в держателе из немагнитного материала, плотность которого равна плот- ности материала постоянного магнита, при этом держатель выполнен со смещенным в направлении вектора намагниченности магФнг. I
нита центром тяжести, причем смещение г определяется как
()УмН pVg
где Вг - остаточная индукция материала магнита.
fa- магнитная постоянная;
Не - коэрцитивная сила материала магнита;
VM - объем магнита;
Н - напряженность горизонтального геомагнитного поля;
р- плотность материала держателя или магнита;
V - обьем держателя с магнитом.
g - ускорение силы тяжести.
ПЕРВИЧНЫЙ ИЗМЕРИТЕШИЙ ПРЕОБРАЗОВАТЕЛЬ ВЕКТОРА СКОРОСТИ ТЕЧЕНИЯ
ИНТЕРФЕЙС
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Руководство по гидрологическим работам в океанах и морях | |||
| Л., Гидрометеоиз- дат, 1977, с | |||
| Кухонный очаг | 1922 |
|
SU537A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3903741, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
