Изобретение относится к способам магнитных измерений и предназначено для использования в геофизических исследованиях.
I Цель изобретения - повышение точности и быстродействия определения квадранта местоположения намагниченного тела.
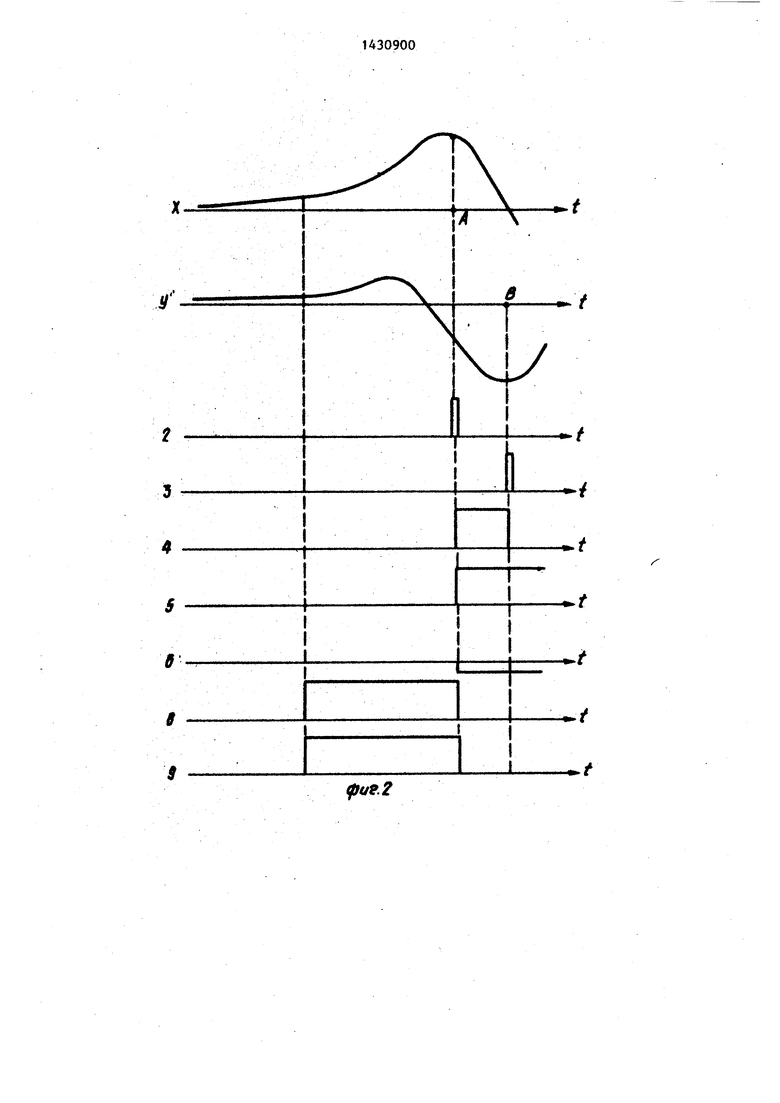
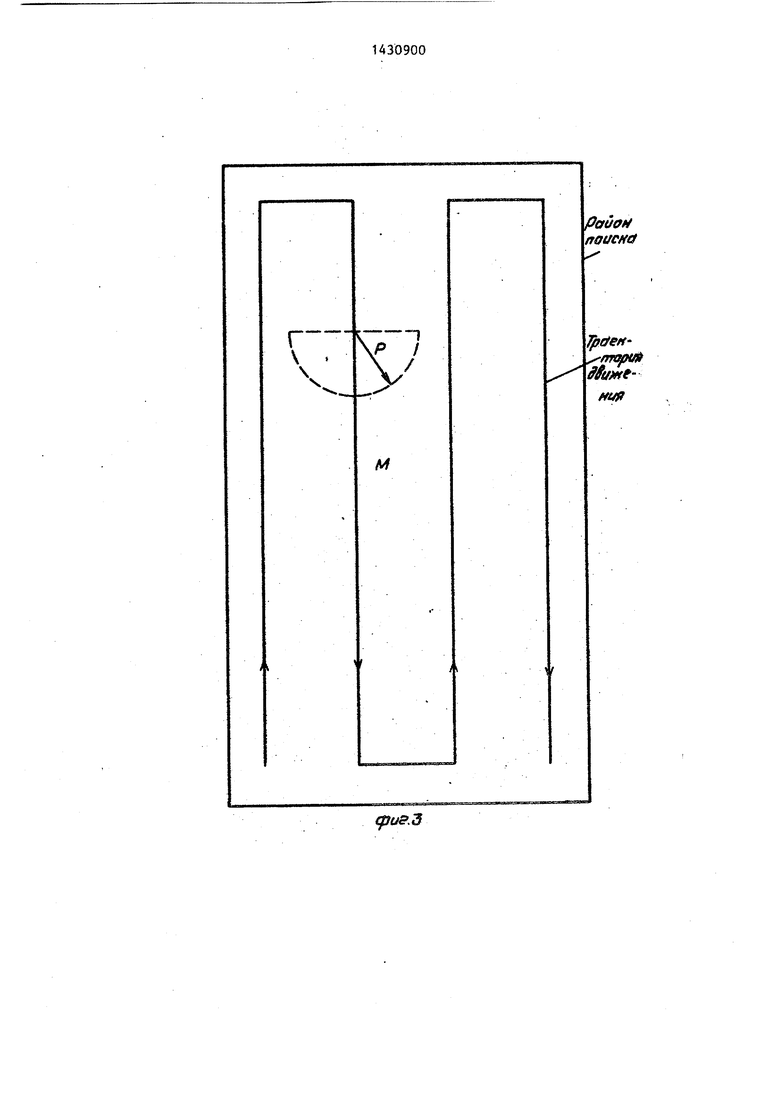
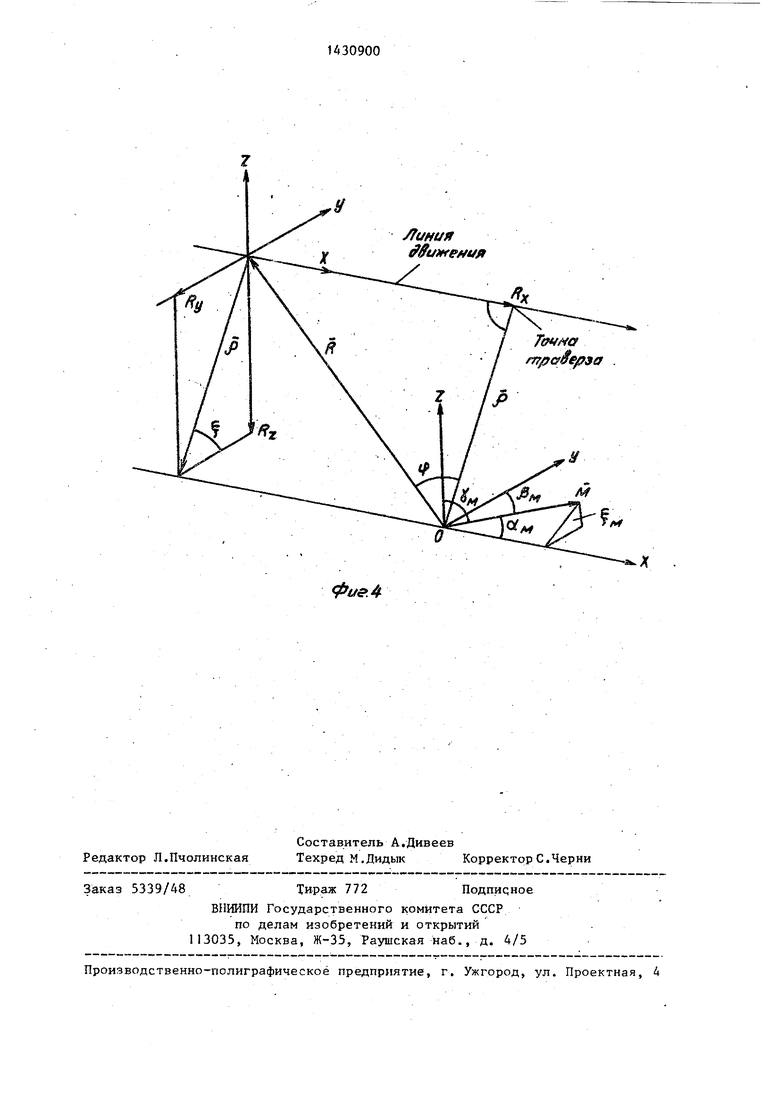
На фиг, 1 представлена структурная схема устройства, реализующего спо- соб; на фиг. 2 - временные диаграммы процессов в устройстве, реализующем способ; на фиг, 3 - траектория движения подвижной платформы при поиске намагниченного тела; на фиг. 4 - система координат и взаимная ориентация радиус вектора R и вектора магнитного момента аномалии М.
Устройство, реализующее способ, содержит трехкомпонентный магнитометр 1, к выходам каналов X (продольный), Y (поперечный) иг (вертикальный) которого подключены соответственно входы дифференциаторов 2 и 3 каналов X и Y, выходы которых соединены с входами RS-триггера 4, причем S-вход триггера 4 соединен с выходом дифференциатора 2 канала X, а R-вход триггера 4 соединен с выходом диффе- ренциатора 3 канала У, блоки 5- 7 запоминания каналов X, Y, Z соответственно, на входы управления записью которых подается сигнал с выхода дифференциатора 2; блоки 8 - 10 вычитания, вторые входы которых подключены k выходам блоков 5-7 запоминания соответственно, выход блока 8 вьгчита- ния канала X соединен с входами схем 11 и 12 сравнения знаков, вторые входы которых соединены с выходами блоков 9 и 10 вычитания соответственно, при зтом вькоды схем t1 и 12 сравнения знаков соединены с входами логического блока 13с индикатором, а третий вход блока 13. соединен с выходом триггера 4,
Реализация способа определения квадранта местоположения намагниченного тела основана на следующих предпосыпках и соотношениях.
На фиг. 3 показана типовая траектория движения подвижной платформы при поиске намагниченного тела. При таком режиме движения искомое тело может войти в зону обнаружения, обо- значенную радиусом R (очевидно, даль- rtocTb обнаружения намагниченного те- /la зависит от чувствительности маг
нитопровода и значения магнитного момента тела, обозначенного на фиг. 3 вектором М), только в передней полусфере относительно курса движения платформы. При непрерывных измерениях параметров магнитного поля в процессе поиска намагниченного тела и движения по траектории фиг. 3 предположение о возможности появления искомого тела в задней относительно курса движения полусфере является ложным, поскольку некоторое время назад при прямолинейном движении тело неминуемо находилось в передней полусфере. Разумеется, речь идет о неподвижном объекте поиска.
Задачей способа определения квадранта местоположения намагниченного тепа является необходимость определения квадранта, в котором лежит вектор f . Этот квадрант однозначно задается знаками cos и sin, при этом знак cos задает направление оси квадранта по горизонтали, а знак sin по вертикали. Рассмотрим соотношения, на основании которых могут быть определены знаки cos и sin. Вектор поля намагниченного тела (диполя) в точке наблюдения в произвольной декартовой системе координат XYZ, в центре которой помещен диполь, может быть определен из известного вьфажения:
I
20 25 JQ .
35
где Bt, В, 2 составляющие вектора индукции поля диполя в точке наблюдения;
S - модуль радиуса-вектора, проведенного из начала координат в течку наблюдения; jU(j - магнитная постоянная вакуума;
RxsR,,E2 координаты точки наблюдения;
М,М,М2- составлякяцие вектора магнитного момента М
диполя.
В выражениях (1) в соответствии с фиг. 4 переменными величинами при прямолинейном движении подвижной
платформы с постоянной скоростью вдоль оси X будут Ry и R. С учетом этого и, введя обозначения постоянных величин
RJ+..
fV M/4i p A;
,
после элементарных преобразований (1 вьфажения для составляющих By(t), B.(t), Bj(t) как функций времени в процессе движения записывают следующим образом:
B;(t)A(Ua2t2) t 2туУ2 2 + (m,cos +iri2sinp t-tnxj ;
B,j(t)A(1+a2t2)
-sn
-m.yztz-f
Из соотношений (2) следует, чт при изменении t (т.е. Rj;, так как ) от -00 до +00 по достижен некоторой точки t (положение точ tg зависит от ориентации вектора Ы составляющие вектора поля намагни ного тела В (t) , B,(t), Bj(t) изм (5 ют свою полярность (момент смены лярности у B};(t), By(t), B2(t) на пает в различное время). Из выраже НИИ (4) следует, что смена полярн ти текущих значений В (tf), Ву(М ),
4-3fVmxCos t+m,-(2R2v) Rp -3tn;R,, R ; jo г(Ч ) обусловлена только наличием
B2(t)A(1+a2t2) Г-т- Уйг+З Ут xsin . t+m .j()+3my- R,,Rz, 2)
где m,my,m - единичные векторы момента М;
V - скорость движения. В тригонометрической форме как функции угла if (очевидно, угол ifsin(2lf-n) и cos(2if- ) в этих выраж ниях, так как угол 1/ изменяется ot -90 до +90 (см. фиг.А) и функция созЗц при изменениях i/ в этих пред 25 лах своего знака не изменяет. Поэт му, начиная с некоторого момента в мени, поведение Bj,(i/ ), By(if), В2(Ц определяется в основном sin(2if-ii) и cos(2Lf-i|) в соответствии с (А) и
sin(2lf-n) и cos(2if- ) в этих выражениях, так как угол 1/ изменяется ot -90 до +90 (см. фиг.А) и функция созЗц при изменениях i/ в этих преде- 25 лах своего знака не изменяет. Поэтому, начиная с некоторого момента вре мени, поведение Bj,(i/ ), By(if), В2(Ц ) определяется в основном sin(2if-ii) и cos(2Lf-i|) в соответствии с (А) и
единственный переменнъй угол в про- влиянием слагаемьж а, 5, е , г на пове- цессе движения по прямолинейной траек- О „ ( , ,, „ „ тории, см, фиг. А l arctgVt/p) выражения для составлякяцих Вх,Ву, В после элементарных тригонометрических , преобразований записываются из (2)
дение B(i4), B(qi), В2(Ч) можно пренебречь. Очевидно, что таким моментом времени является момент смены знака производной функции В ((f ) , поскольку смена знака этой производной означает, что давление функции sin(2L/-ti) на поведение B;((yi) превысило давление слагаемого ее в выражении (4). С этого же момента поведение В ,j(lf) и Bjd/) определяется в основв виде:
B,(if).(0,5cosc/ +1,5psin(
B,((if)C Cos M( 1 jScos -sino/M cos( дение B(i4), B(qi), В2(Ч) можно пре небречь. Очевидно, что таким моментом времени является момент смены знака производной функции В ((f ) , по скольку смена знака этой производно означает, что давление функции sin(2L/-ti) на поведение B;((yi) превыси ло давление слагаемого ее в выражении (4). С этого же момента поведени В ,j(lf) и Bjd/) определяется в основ-U-cos/S -1,5pcos(2tf-4)- cosp; втянне CQs(2(-i) , Смена знака B2(4)C-cos 4(1, .cos(- производной В х(Ч ) происходит до до-5 -cos3r,«-1,5pcos(2if-T,) sinp, (3)
-где
- p(cos2();,,+sin2c cos4 - «) ; ..1 угол между вертикальной осью
45
стижения точки траверза, что следуе из (2) и (4). На основании изложенн го можно записать соотношения для знаков приращений текущих составляющих вектора поля намагниченного тела имекяцие место после смены знака производной Bx() 5
ОУ и проекцией вектора М на плоскост
движения, образованную осью ОХ и линией курса движения (угол i не показан) .
Для компактной записи и удобства анализа обозначим произведения и суммы постоянных величин, входящих в (3) следующим образом:
о 0,5coso(
,5 81по(„.С08(-5)-С05Ру„;
,5 sin -sin « „cos(-5,)-соз уд,; ,5р.
Тогда выражения (3) записываются в виде:
Б(ц )С cos l (a + r.sin(2tf- ));
Ву((/)С- cos Lj(5-r-cos(2tf-n)-co3);
Bj(ip)-C- cos tf(e-r. cos(2tf-n). sinp .
(A)
Из соотношений (2) следует, что при изменении t (т.е. Rj;, так как ) от -00 до +00 по достижении некоторой точки t (положение точки tg зависит от ориентации вектора Ы) составляющие вектора поля намагниченного тела В (t) , B,(t), Bj(t) изменя- ют свою полярность (момент смены полярности у B};(t), By(t), B2(t) наступает в различное время). Из выраже- НИИ (4) следует, что смена полярности текущих значений В (tf), Ву(М ),
г(Ч ) обусловлена только наличием
jo г(Ч ) обусловлена только наличием
sin(2lf-n) и cos(2if- ) в этих выражениях, так как угол 1/ изменяется ot -90 до +90 (см. фиг.А) и функция созЗц при изменениях i/ в этих преде- 25 лах своего знака не изменяет. Поэтому, начиная с некоторого момента вре мени, поведение Bj,(i/ ), By(if), В2(Ц ) определяется в основном sin(2if-ii) и cos(2Lf-i|) в соответствии с (А) и
влиянием слагаемьж а, 5, е , г на пове- О „ ( , ,, „ „
влиянием слагаемьж а, 5, е , г на пове- О „ ( , ,, „ „
дение B(i4), B(qi), В2(Ч) можно пренебречь. Очевидно, что таким моментом времени является момент смены знака производной функции В ((f ) , поскольку смена знака этой производной означает, что давление функции sin(2L/-ti) на поведение B;((yi) превысило давление слагаемого ее в выражении (4). С этого же момента поведение В ,j(lf) и Bjd/) определяется в основ ° ом втянне CQs(2(-i) , Смена знака производной В х(Ч ) происходит до до45
стижения точки траверза, что следует из (2) и (4). На основании изложенного можно записать соотношения для знаков приращений текущих составляющих вектора поля намагниченного тела, имекяцие место после смены знака производной Bx() 5
sign(4B)sign(sin(.)) ;
sign(dBv,)sign(-cos(2if-i). cost;
signUB2) sign(-cos(2i/-n.) -sinf.
(5)
Ha основании выражений (5) можно сделать вывод: в интервале между пер- 55 вой сменой знака производной продольной составляющей и ближайшей после дующей сменой знака производной поперечной соотавляющей вектора поля
50
намагниченного тела путем сравнения знаков разностей (приращений) значений продольной и поперечной, а также продольной и вертикальной составляющих можно определить квадрант местО положения намагниченного тела относительно прямолинейного курса движения подвижной платформы с установленным
цессе определения оси квадранта местоположения намагниченного тела по горизонтали, поскольку процесс опре- - деления оси квадранта по вертикали протекает аналогично. При входе магнитометра 1 установленного на движущуюся прямолинейно платформу, в поле намагниченного тела на выходах X,Y,Z
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТЫ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU1829578C |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| СПОСОБ РЕГИСТРАЦИИ ФАЗЫ КВАДРАТУРНЫХ СИГНАЛОВ | 2018 |
|
RU2692965C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| Способ измерения проекций вектора магнитной индукции с подвижной платформы и устройство для его осуществления | 1989 |
|
SU1670637A1 |
| Способ обнаружения неоднородности магнитного поля и устройство для его осуществления | 1989 |
|
SU1659942A1 |
| СПОСОБ ГАРМОНИЧЕСКОГО АНАЛИЗА СИГНАЛА | 1992 |
|
RU2010246C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОШЕНИЯ ЗНАЧЕНИЙ АМПЛИТУД КВАЗИСИНУСОИДАЛЬНЫХ СИГНАЛОВ | 1994 |
|
RU2093886C1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1989 |
|
SU1686681A1 |
Изобретение предназначено для использования в геофизических иссле- . дованиях. Цель изобретения - повьшение точности и быстродействия определения квадранта местоположения намагниченного тела. Устройство, реализующее способ, содержит трехкомпонент- ный магнитометр 1, дифференциаторы каналов X и Y 2 и 3, RS-триггер 4, блоки 5,6,7 запоминания каналов X, Y,Z, блоки 8,9,10 вычитания, схемы 11 12 сравнения знаков и логический . блок 13. Таким образом, устройство, реализующее способ, в интервале между первой сменой знака производной продольной составляющей и первой последующей сменой знака попере Уной составляющей посредством сравнения знаков разностей продольных и попе- . речных составляющих вектора поля намагниченного тела определяет направление оси квадранта местоположения искомого тела по горизонтали относительно прямолинейного курса движения подвижно й платформы с установленным на ней трехкомпонентным магнитометрам, посредством сравнения знаков разностей продольных и вертикальных составляющих определяет направление оси квадранта по вертикали, 4 ил. Уст.О ЦП (Л е | чя со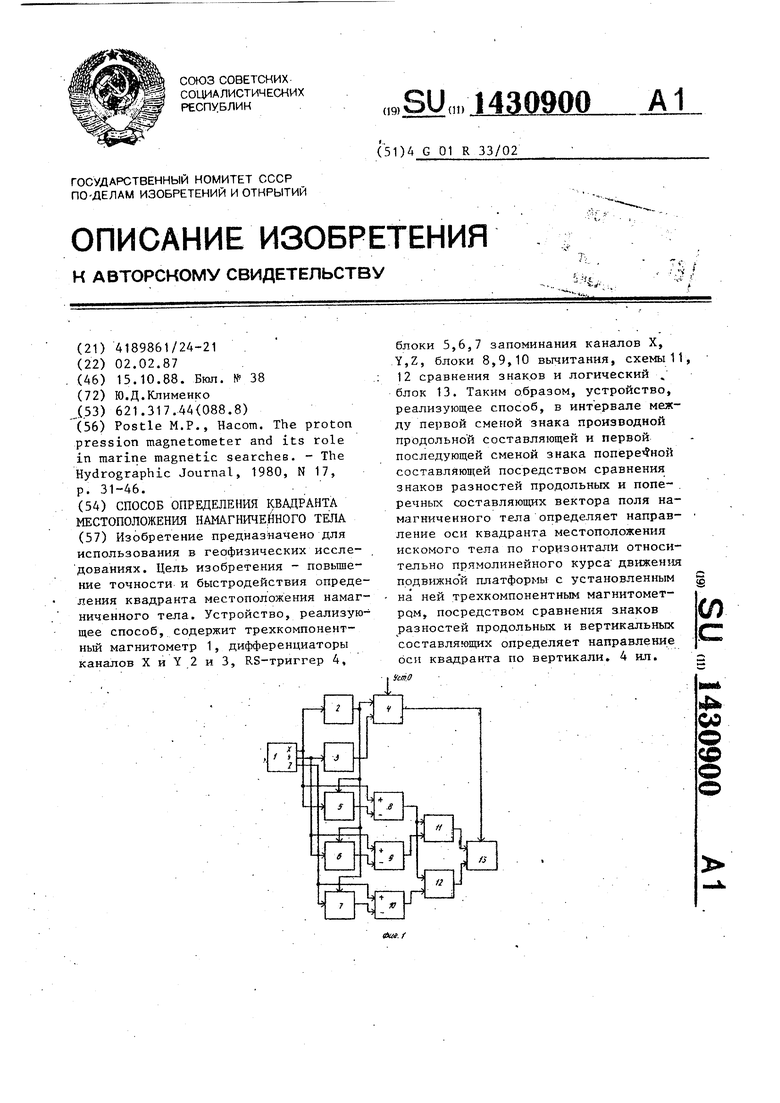
с нарастагодей до некоторой точки траектории амплитудой (диаграммы X,Y на фиг.2). В момент смены знака производной сигнала X (точка А на диаг- g рамме X) на выходе дифференциатора 2 формируется короткий импульс и устройство начинает выполнять свои функ ции, работа устройства до момента времени А не интересует, поскольку индикатор блока 13 стробирован выходным сигналом триггера 4, и информация на индикаторе не отображается.
Процесс формирования короткого импульса по смене знака производной
20
30
на ней трехкомпонентным магнитометром ,Q магнитометра 1 появляются сигналы при произвольной ориентации искомого тела (произвольная ориентаидя намагниченного тела задана в (5) углом }, Этот вывод основан на следующем:
знак приращения л By от угла не зависит;
знак приращения IB,. зависит от
знак приращения 2 зависит от sin|;
на участке измерений приращений (между сменами знаков производных В y(tf) и Ву(() функции sin(2V- ) и COS(24-,) синфазны, т.е. имеют одина новый знак приращений, поэтому совпа- 25 сигнала Х осуществляется следующим дение или противогтоложность з наков обра зом..
ЛВ, и BSJ, а также йЪ и JBj зависят только от знаков cos и sin соответственно г если знаки Jb и ЛВу совпадают, то-cosI имеет знак -, если знаки ffbj( ТЛ ЛЁ- противоположны, то COS
имеет знак если знаки йЪ и Вг совпадают, то sin с имеет знак -, если знаки ЛВу и Bj противоположны, то sin имеет знак ).
Знаки cos и sinF однозначно зада« ют квадрант местоположения искомого намагниченного тела.
Конкретный вывод о знаках cos и sin зависит от положительных направлений осей трехкомпонентного магнитометра. Соотношения по определению квадранта местоположения тела спра ведливы для тех положительных направлений осей трехкомпонентного магнитометра, которые показаны на фиг.4. При других положительных направлениях осей магнитометра приведенные соотношения изменятся, например, если ось OZ (в отличие от фиг«4) ориентирована вертикально вниз, то sin имеет знак +, если знаки и By и flH-j совпадают, и знак -, если знаки йВ и 7. про35
40
50
Выходным импульсом дифференциатора 2 осуществляется запись текущих значений сигналов Х, У, Z в блоки 5 7 запоминания соответственно, триггер 4 переводится в единичное состояние (триггер 4 устанавливается в нулевое состояние сигналом УСТ.О в некоторой дальней точке, где отсутствз ет поле искомого тела). В блоках 8 и 9 вычитания из текущих значенМ сигналов Х и Y вычитаются записанные в точке А значения сигналов, причем блоки 8-10 вычитания могут быть выполнены на основе аналогового компаратора с цифровым выходом, поэтому на выходе блоков вычитания присутствует цифровой сигнал (1 или О), соответствующий знаку разности между текущим значением сигнала на соответствующем выходе магнитометра 1 и записанным значением сигнала на выходе соответствующего запоминающего устройства, например, если разность между текущим и записанным значениями сигнала Х положительна, то на выходе блока 8 вычитания присутствует уровень 1, если эта разность отрицательна, то на выходе -блока 8 присутствует уровень О. Для устранения возможного дребезга на выходе блоков 9 и tO, который может появиться при наличии помех на вьтходах магнитометра t, блотивоположны, и т.д.
Устройство (см, фиг.t), реализующее способ, работает следующим образом.
Работу устройства рассмотрим на примере взаимодействия блоков в прос нарастагодей до некоторой точки траектории амплитудой (диаграммы X,Y- на фиг.2). В момент смены знака производной сигнала X (точка А на диаг- рамме X) на выходе дифференциатора 2 формируется короткий импульс и устройство начинает выполнять свои функции, работа устройства до момента времени А не интересует, поскольку индикатор блока 13 стробирован выходным сигналом триггера 4, и информация на индикаторе не отображается.
Процесс формирования короткого импульса по смене знака производной
магнитометра 1 появляются сигналы
сигнала Х осуществляется следующим обра зом..
0
5
0
0
5
Выходным импульсом дифференциатора 2 осуществляется запись текущих значений сигналов Х, У, Z в блоки 5 7 запоминания соответственно, триггер 4 переводится в единичное состояние (триггер 4 устанавливается в нулевое состояние сигналом УСТ.О в некоторой дальней точке, где отсутствз ет поле искомого тела). В блоках 8 и 9 вычитания из текущих значенМ сигналов Х и Y вычитаются записанные в точке А значения сигналов, причем блоки 8-10 вычитания могут быть выполнены на основе аналогового компаратора с цифровым выходом, поэтому на выходе блоков вычитания присутствует цифровой сигнал (1 или О), соответствующий знаку разности между текущим значением сигнала на соответствующем выходе магнитометра 1 и записанным значением сигнала на выходе соответствующего запоминающего устройства, например, если разность между текущим и записанным значениями сигнала Х положительна, то на выходе блока 8 вычитания присутствует уровень 1, если эта разность отрицательна, то на выходе -блока 8 присутствует уровень О. Для устранения возможного дребезга на выходе блоков 9 и tO, который может появиться при наличии помех на вьтходах магнитометра t, блоки 8 - 10 могут быть вьшолнены на основе компаратора с гистерезисом. ходные сигналы блоков 8 и 9 вычитания поступают на схему 11 сравнения знаков, представляющую собой логический Элемент ИСКЛЮЧАЩЕЕ ИЛИ, которая может быть вьшолнена, например, на микросхеме типа 155ЛП5 и пр едназначена для реализации следующей логической Q функции: при совпадении сигналов на входе, т.е. когда оба входных сигнала, имеют уровни 1 или О, на выходе схемы 11 сравнения знаков пояйляется, например, 1, при несовпадении вход- 15 ных сигналов, т.е. когда один из сигналов имеет уровень t, а другой, имеет уровень О, то на выходе схемы сравнения знаков появляется уровень О. Таким образом, когда знаки разностей между текущими н записанными в запоминающих блоках 5 и 6 значениями продольной и поперечной составляющих совпадают, на выходе схемы сравнения знаков присутствует уровень 1,. при несовпадении знаков - О,, что вызывает отображение на индикаторе блока 13 соответственно показаний Тело справа или Тело слева, т.е. определяется направление оси квадранта местоположения искомого тела по горизонтали. Процесс определения оси квадранта по вертикали протекает аналогично, при этом для определения направления зтой оси используются блотора доля намагниченного тела определяется направление оси квадранта местоположения искомого тела по горизонтали относительно прямолинейного курса движения подвижной платформы с установленным на ней трехкомпонентным магнитометром, посредством .сравнения знаков разностей продольных и вертикальных составляющих определяется направление оси квадранта по вертикали.
Формула изобретения
20
Способ определения квадранта местоположения HaMarHtrqeHHoro тела, включающий непрерьгеное измерение магнитного поля намагниченного тела при прямолинейном перемещении магнито метра и определение точек экстремума текущих значений магнитного поля Зто- го тела, отличающийся тем, что, с целью повьшения точности и быстродействия, измеряют одновременно текущие значения продольныхi поперечных и вертикальных составляю- 1ЦИХ векторов магнитного поля намагниченного тела в двух точках траектории перемещения магнитометра, опреде- gQ ляют знаки разностей между значениями одноименных составляющих в последующей и предьщущей точках траектории, сравнивают эти знаки между собой, причем измерения текущих значений поля и определение знаков разнос25
1C. -. К И 5,7,8,10, схема 12. Соответственно, тей составляющих векторов поля намагпри наличии на выходе схемы t2 сравнения знаков уровня 1 на индикаторе блока 13 отображаются показания, например, Тело вьше, при наличии уровня О - Тело ниже плоскости движения.
. Таким образом, устройство, реали- . вующее способ, выполняет следующие функции: в интервале между первой сменой знака производной продольной составляющей и первой последующей сменой знака поперечной составляннцей посред- .ством сравнения знаков разностей продольных и поперечных составляющих век40
45
ниченного тела вьшолняют в интервале между первым экстремумом продольной составляющей и ближайшим последующим экстремумом вертикальной составлякицей вектора поля намагниченного тела, направление оси квадранта по горизонтали определяют посредством сравнения знаков разностей продольных и поце- речньк составляющих, а направление оси квадранта по вертикали определя ют посредством сравнения знаков разностей продольных и вертикальных составляющих векторов магнитного поля намагниченного тела,
тора доля намагниченного тела определяется направление оси квадранта местоположения искомого тела по горизонтали относительно прямолинейного курса движения подвижной платформы с установленным на ней трехкомпонентным магнитометром, посредством .сравнения знаков разностей продольных и вертикальных составляющих определяется направление оси квадранта по вертикали.
Формула изобретения
Способ определения квадранта местоположения HaMarHtrqeHHoro тела, включающий непрерьгеное измерение магнитного поля намагниченного тела при прямолинейном перемещении магнито метра и определение точек экстремума текущих значений магнитного поля Зто- го тела, отличающийся тем, что, с целью повьшения точности и быстродействия, измеряют одновременно текущие значения продольныхi поперечных и вертикальных составляю- 1ЦИХ векторов магнитного поля намагниченного тела в двух точках траектории перемещения магнитометра, опреде- ляют знаки разностей между значениями одноименных составляющих в последующей и предьщущей точках траектории, сравнивают эти знаки между собой, причем измерения текущих значений поля и определение знаков разнос
. -. 0
5
ниченного тела вьшолняют в интервале между первым экстремумом продольной составляющей и ближайшим последующим экстремумом вертикальной составлякицей вектора поля намагниченного тела, направление оси квадранта по горизонтали определяют посредством сравнения знаков разностей продольных и поце- речньк составляющих, а направление оси квадранта по вертикали определя ют посредством сравнения знаков разностей продольных и вертикальных составляющих векторов магнитного поля намагниченного тела,
t/9.2
/
(puff.3
фи&Л
/ft/ния ffffu)ffef/uf
| Postle М.Р., Hacom | |||
| The proton pression magnetometer and its role in marine magnetic searches | |||
| - The Hydrographic Journal, 1980, N 17, p | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
