(21)4121251/24-21
(22)02.07.86
(46) 15,05.89. Бюл. № 18
(71)Опытное производство Института биологии южных морей им. А„О.Ковалевского
(72)В.М„Аскинадзи и В„В.Дубовский
(53)621 .317.7(088.8)
(56)Авторское свидетельство СССР № 1013768, кл. G 01 К 7/00, 1985,
Авторское свидетельство СССР № 1307570, кл. Н 03 К 7/08, 02,07.85.
(54)СПОСОБ ПРЕОБРАЗОВАНИЯ АНАЛОГОВОГО СИГНАЛА В ШИРОТНО-ИМПУЛЬСНЫЙ И ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
(57)Изобретение может быть использовано в измерительных преобразователях электрических сигналов различных датчиков, устанавливаемых для исследования нестационарных процессов. s Целью изобретения является уменьшение динамической погрешности преобразования и компенсация динамической погрешности первичного измерительного преобразователя, например источника аналогового сигнала. Способ предусматривает формирование развертывающего сигнала, например пилообразного напряжения. Аналоговый выходной сигнал датчика уменьшают в at. раз, где о 1 , и сравнивают с пилообразным. Далее формируют последовательность вспомогательных импульсов, определяют разность длительностей этих импульсов, а сигнал, пропорциональный этой разности, подвергают функциональному преобразованию и формируют корректирующий сигнал. Этот сигнал суммируют с аналоговым сигналом Полученный сигнал сравнивают с пилообразным напряжением и формируют выходной импульсный сигнал, длительность каждого импульса в котором определяется от момента запуска пилообразного напряжения до момента равенства пилообразного напряжения сумме входного аналогового и корректирующего сигналов 2 с. и 1 ф-лы, 1 ил„
о
оо
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНТЕГРИРУЮЩЕГО АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 2014 |
|
RU2571549C1 |
| ИНТЕГРИРУЮЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2012 |
|
RU2496228C1 |
| Регулятор электрической мощности переменного тока(его варианты) | 1981 |
|
SU983690A1 |
| НЕЛИНЕЙНЫЙ ШИРОТНО-ИМПУЛЬСНЫЙ МОДУЛЯТОР | 2000 |
|
RU2185022C1 |
| Устройство для измерения температуры | 1984 |
|
SU1268970A1 |
| ЧАСТОТНО-ИМПУЛЬСНЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ РАЗМЕРА | 1996 |
|
RU2117247C1 |
| Аналого-цифровой преобразователь | 1987 |
|
SU1481887A1 |
| ЦИФРОВОЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ РАЗМЕРА | 1996 |
|
RU2123663C1 |
| Аналого-цифровой преобразователь | 1981 |
|
SU1035794A1 |
| Способ измерения действительной скорости движения наземных транспортных средств и устройство для его осуществления | 1989 |
|
SU1835528A1 |
Изобретение может быть использовано в измерительных преобразователях электрических сигналов различных датчиков, устанавливаемых для исследования нестационарных процессов. Целью изобретения является уменьшение динамической погрешности преобразования и компенсация динамической погрешности преобразования и компенсация динамической погрешности первичного измерительного преобразователя, например источника аналогового сигнала. Способ предусматривает формирование развертывающего сигнала, например пилообразного напряжения. Аналоговый выходной сигнал датчика уменьшают в α раз, где α *98 1, и СРАВНиВАюТ C пилООбРАзНыМ. ДАлЕЕ фОРМиРуюТ пОСлЕдОВАТЕльНОСТь ВСпОМОгАТЕльНыХ иМпульСОВ, ОпРЕдЕляюТ РАзНОСТь длиТЕльНОСТЕй эТиХ иСпульСОВ, A СигНАл, пРОпОРциОНАльНый эТОй РАзНОСТи, пОдВЕРгАюТ фуНКциОНАльНОМу пРЕОбРАзОВАНию и фОРМиРуюТ КОРРЕКТиРующий СигНАл. ЭТОТ СигНАл СуММиРуюТ C АНАлОгОВыМ СигНАлОМ. ПОлучЕННый СигНАл СРАВНиВАюТ C пилООбРАзНыМ НАпРяжЕНиЕМ и фОРМиРуюТ ВыХОдНОй иМпульСНый СигНАл, длиТЕльНОСТь КАждОгО иМпульСА B KOTOPOM ОпРЕдЕляЕТСя OT MOMEHTA зАпуСКА пилООбРАзНОгО НАпРяжЕНия дО MOMEHTA PABEHCTBA пилООбРАзНОгО НАпРяжЕНия СуММЕ ВХОдНОгО АНАлОгОВОгО и КОРРЕКТиРующЕгО СигНАлОВ. 2 C.п.1 з.п. ф-лы, 1 ил.
Изобретение относится к импульсной технике и может быть использовано в измерительных преобразователях электрических сигналов различных датчиков, устанавливаемых для исследования нестационарных процессов.
Целью изобретения является уменьшение динамической погрешности преобразования и компенсации динамической погрешности первичного измерительного преобразователя (источника аналогового сигнала).
Способ преобразования аналогового сигнала в широтно-импульсный заключается в следующем
Формируют развертывающий сигнал, в простейшем случае пилообразное напряжение. Аналоговый сигнал, который является выходным сигналом первичного измерительного преобразователя (датчика), уменьшают, например, в d раз, где с 1, и сравнивают с пилообразным j Далее Аормируют последовательность вспомогательных импуль14
сот;, длитнпьносль каждого иг которых определяется от момента запуска пилообразного напряжения до момента равенства уменьшенного в А раз аналогового сигнала. Затем определяют разность длительностей двух вспомогательных импульсов в и интервалы преобразования и сигнал,
ПрОПОрЦИОНалЬНЫЙ ЭТОЙ разНОСТИ, ПОД-
вергают функциональному преобразованию, Таким образом формируется корректирующий сигнал.., Этот сигнал суммируют с полным аналоговым сигналом, полученный суммарный сигнал сравнива ют с пилообразным напряжением, а затем формируют выходной импульсный сигнал, длительность каждого импульса в котором определяется от момента запуска пилообразного напряжения до момента равенства пилообразного напряжения сумме входного аналогового и корректирующего сигналов
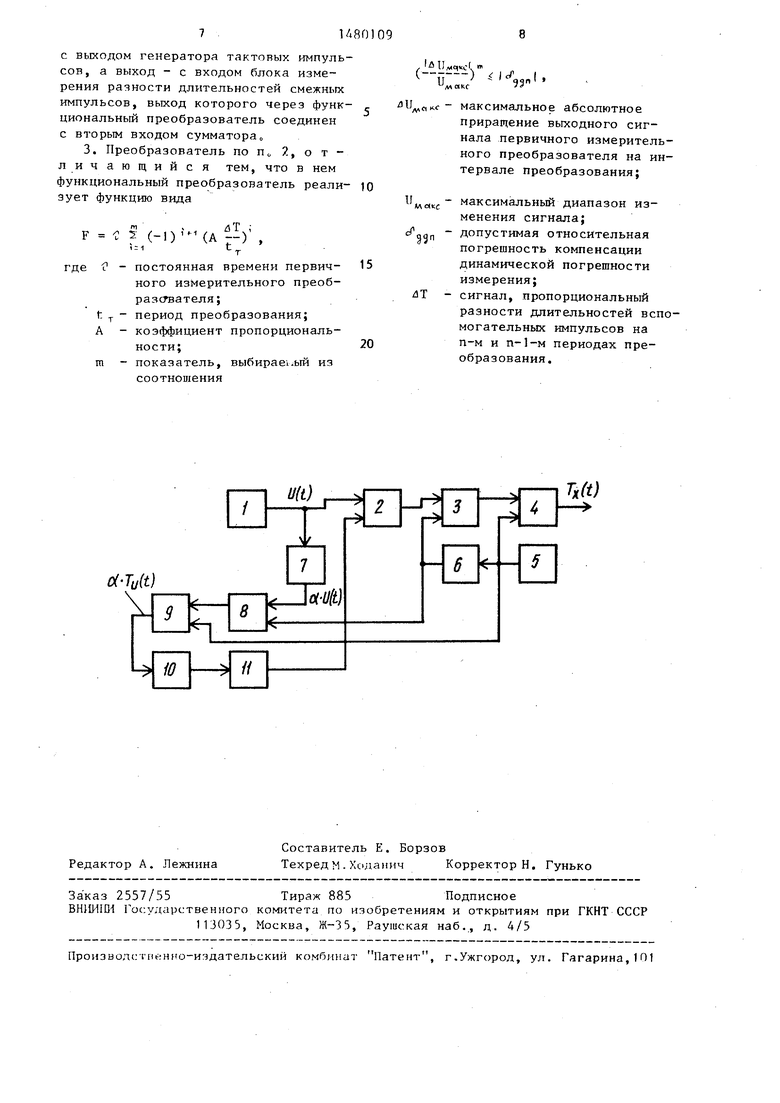
На чертеже представлена функциональная схема измерительного преобразователя аналогового сигнала в ши- ротно-импульсный.
Измерительный преобразователь аналогового сигнала в широтно-импульс-1- ный содержит первичный измерительный преобразователь 1 (ПИП) - источник аналогового сигнала, сумматор 2, компаратор 3, триггер 4, генератор 5 тактовых импульсов, формирователь 6 пилообразного напряжения, делитель 7 напряжения, компаратор 8, триггер 9, блок 10 измерения разности длительностей смежных импульсов и функциональный преобразователь 11, при этом соединены последовательно ПИП 1 сумматор 2, компаратор 3 и триггер 4 выход которого соединен с выходной шиной, а второй вход - с выходом генератора 5 тактовых импульсов и входом формирователя 6 пилообразного напряжения, выход которого соединен с вторым входом компаратора 3, причем выход ПИП 1 через делитель 7 напряжения соединен с первым входом компаратора 8, второй вход которого соединен с выходом формирователя 6 пилообразного напряжения, а выход - с первым входом триггера 9, второй вход которого соединен с выходом генератора ri тактовых импульсов, а выход - г иходом блока 10 измерения разности дппгрлъногтей смежных импульсов, -шчод которого через функQ
5 о
5
циональный преобразователе 11 соединен с вторым входом сумматора 2
Сумматор 2 может быть выполнен на операционном усилителе, триггеры 4 и 9 - на основе RS-триггеров, блок
10измерения разности длительностей смежных импульсов - на основе двух элементов выборки-хранения, входы которых соединены с выходом формирователя пилообразного напряжения, выходы - с входами вычитающего устройства, а управляющие входы через формирователи импульсов - с выходом триггера 9, при этом выход вычитающего устройства соединяют с входом функционального преобразователя 11„
Функциональный преобразователь
11может быть выполнен как тп параллельно включенных параболических преобразователей с соответствующими масштабирующими коэффициентами А, выходы которых соединены с входами суммирующего операционного усилителя, выход которого соединяют с входом сумматора 2, причем количество параболических преобразователей m определяется из соотношения
0
5
0
где
сО
.С
U
м акс
f
93
ЧЗ
и
-допустимая относительная погрешность компенсации динамической погрешности измерения;
-максимальный диапазон изменения выходного сигнала ПИП на интервале преобразования;
-максимальное абсолютное приращение этого сигнала.
Функциональный преобразователь 11 реализует функцию вида
|ди
45
i м)ЧА-4Д5
i-1c т
Г-т
лт - постоянная времени ПИП; период преобразования;
сигнал, пропорциональный
разности длительностей вспомогательных импульсов на n-м и п-1-м периодах преобразования.
Функциональный преобразователь такого вида позволяет компенсировать динамическую погрешность ПИП, обусловленную его инерционностью.
Измерительный преобразователь функционирует следующим образом.
-U
пупьг.а ял яьгхпдг генератора S тактовых импульсов запускается формирователь 6 пилообразного напряжения и одновременно на выходах RS-триггеров 4 и 9 формируются передние фронты импульсов. Задний фронт вспомогательного импульса на выходе триггера 9 формируется при срабатывании компаратора 8 в момент равенства пилообразного опорного напряжения и напряжения на выходе делителя 7„ Вспомогательный импульс уменьшенной длительности подается на вход блока 10, на выходе которого формируется напряжение, пропорциональное разности длительностей импульсов на n-м и п-1-м периодах дискретизации,, С помощью функционального преобразователя 11 это напряжение трансформируется в напряжение корректирующей поправки согласно описанному выше алгоритму,, Сумма напряжения поправки и выходного напряжения ПИП определяет момент срабатывания компаратора 3 и, следовательно, момент появления заднего фронта импульса на выходе триггера 4„ В результате на выходе триггера А сформирован импульс, длительность которого скорректирована на величину динамической погрешности измерения, обусловленной инерционностью ПИП. Этот импульс является выходным для измерительного преобразователя,,
Предлагаемый способ и устройство для его осуществления представляют собой один из возможных вариантов последовательной коррекции в измерительном преобразователе, когда запаз дывание ПИП компенсируется в процессе широтно-импульсной модуляции выходного сигнала. При этом динамическая погрешность компенсируется с любой требуемой точностью и в пределах быстродействия ШИМ-преобразования практически безынерционно благодаря тому, что корректирующий сигнал формируется на интервале текущего преобразования, что особенно важно при исследованиях нестационарных процессов с помощью инерционных датчиков.
Формула изобретения
5 0 5 о
0
5
0
5
09б
и корректирующего сигналов, сравнение суммарного сигнала с развертывающим, формирование выходного сигнала, длительность которого пропорциональна результату сравнения, и формирование вспомогательного сигнала, величина которого пропорциональна разности длительностей двух смежных сигналов, отличающий ся тем, что, с целью уменьшения динамической погрешности преобразования и компенсации динамической погрешности источника аналогового сигнала, дополнительно сравнивают развертывающий и уменьшенный аналоговый сигналы, формируют последовательность вспомогательных импульсов, длительность которых пропорциональна результату сравнения, формируют вспомогательный сигнал, величина которого пропорциональна разности длительностей двух смежных вспомогательных импульсов на п-м и п-1-м периодах преобразованиями формируют корректирующий сигнал путем функционального преобразования вспомогательного сигнала о
2„ Измерительный преобразователь аналогового сигнала в широтно-импульсный, содержащий соединенные последовательно первичный измерительный преобразователь (источник аналогового сигнала), сумматор, первый компаратор и триггер, выход которого соединен с выходной шиной устройства, а второй вход - с выходом генератора тактовых импульсов и входом формирователя пилообразного напряжения, выход которого соединен с вторым входом первого компаратора, . и блок измерения разности длительностей смежных импульсов, отличающийся тем, что, с целью уменьшения динамической погрешности устройства и компенсации динамической погрешности первичного измерительного преобразователя, в него дополнительно введены делитель напряжения, второй .компаратор, второй триггер и функциональный преобразователь, при этом выход первичного измерительного преобразователя через делитель напряжения соединен с первым входом второго компаратора, второй вход которого соединен с выходом формирователя пилообразного напряжения, а выход - с первым входом второго триггера, второй вход которого соединен
с выходом генератора тактовых импульсов, а выход - с входом блока измерения разности длительностей смежных импульсов, выход которого через функ- циональный преобразователь соединен с вторым входом сумматора,,
m л Т ; F 2 (-1)-1(А - ) , s i tr
де - постоянная времени первичного измерительного преоб- разо вателя;
t T - период преобразования;
А - коэффициент пропорциональности;
m - показатель, выбираемый из соотношения
1й Пл.цкс , , „
( ) ,| I,
и,макс 73
максимальное абсолютное
приращение выходного сигнала первичного измерительного преобразователя на интервале преобразования;
U
маке
Э9П
-максимальный диапазон изменения сигнала;
-допустимая относительная погрешность компенсации динамической погрешности измерения;
йТ - сигнал, пропорциональный
разности длительностей вспомогательных импульсов на n-м и п-1-м периодах преобразования.
