Изобретение относится к измерительной технике, может быть использовано в доплеровских измерителях действительной скорости движения промышленных и сельскохозяйственных агрегатов, различных транспортных средств.
Целью изобретения является расширение функциональных возможностей путем измерения расстояния до грунтовой поверхности.
Поставленная цель достигается тем, что в способе измерения действительной скорости движения транспортных средств, заключающемся в формировании зондирующего излу- .ченйя с линейной частотной модуляцией, его в передаче в направление поверхности грунта, приема на транспортном средстве отраженного сигнала, выявлении разности частот или периодов переданного и принятого сигналов, получении промежуточного сигнала путем преобразования указанной
00
со
СП
СЛ
ю
00
разности в напряжение, формировании выходного сигнала измерителя в зависимости от амплитуды промежуточного сигнала, а также воздействия на глубину частотной модуляции в зависимости от величины выходного сигнала измерителя, дополнительно определяют минимум амплитуды промежуточного сигнала, определяют длительность интервала времени между моментом передачи зондирующего излучения и моментом достижения указанного минимума, и по длительности этого интервала судят о расстоянии до грунтовой поверхности, а также тем, что формирование выходного сигнала измерителя осуществляют путем интегрирования напряжения, соответствующего амплитуде промежуточного сигнала.
В устройстве для осуществления способа, содержащем передатчик, входной блок, генератор пилообразного напряжения, первый выходной блок, тактовый генератор, блок преобразования разности частот или периодов в напряжение и блок определения разности частот или периодов, первый и второй входы которого подключены соответственно к выходам входного блока передатчика, первый вход которого подключен к выходу генератора пилообразного напряжения, первый выход тактового генератора соединен с первым входом генератора пилообразного напряжения, входи выход преобразователя разности частот или периодов в напряжение подключены соответственно к выходу блока определения разности частот или периодов и к входу первого выходного блока, выход которого соединен со вторым входом генератора пилообразного напряжения, а второй выход тактового генератора соединен со вторым входом передатчика, поставленная цель достигается дополнительным введением второго выходного блока, первый и второй входы которого подключены соответственно к выходу блока преобразования разности частот или периодов в напряжение и к второму выходу тактового генератора.
Поставленная цель достигается также благодаря тому, что выходной блок выполнен в виде интегратора, а второй выходной блок выполнен в виде фильтра, компаратора и триггера, при этом вход фильтра является первым входом второго выходного блока, выход фильтра через компаратор подключен к первому входу триггера, второй вход и выход которого являются соответственно вторым входом и выходом второго выходного блока.
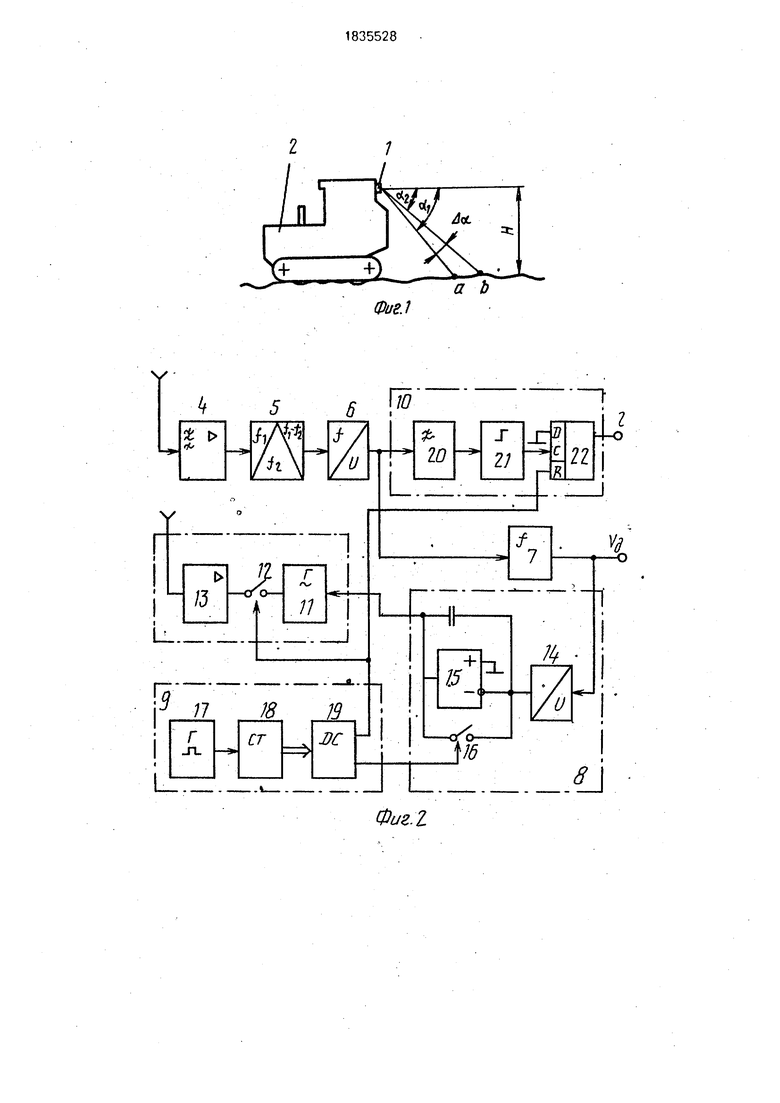
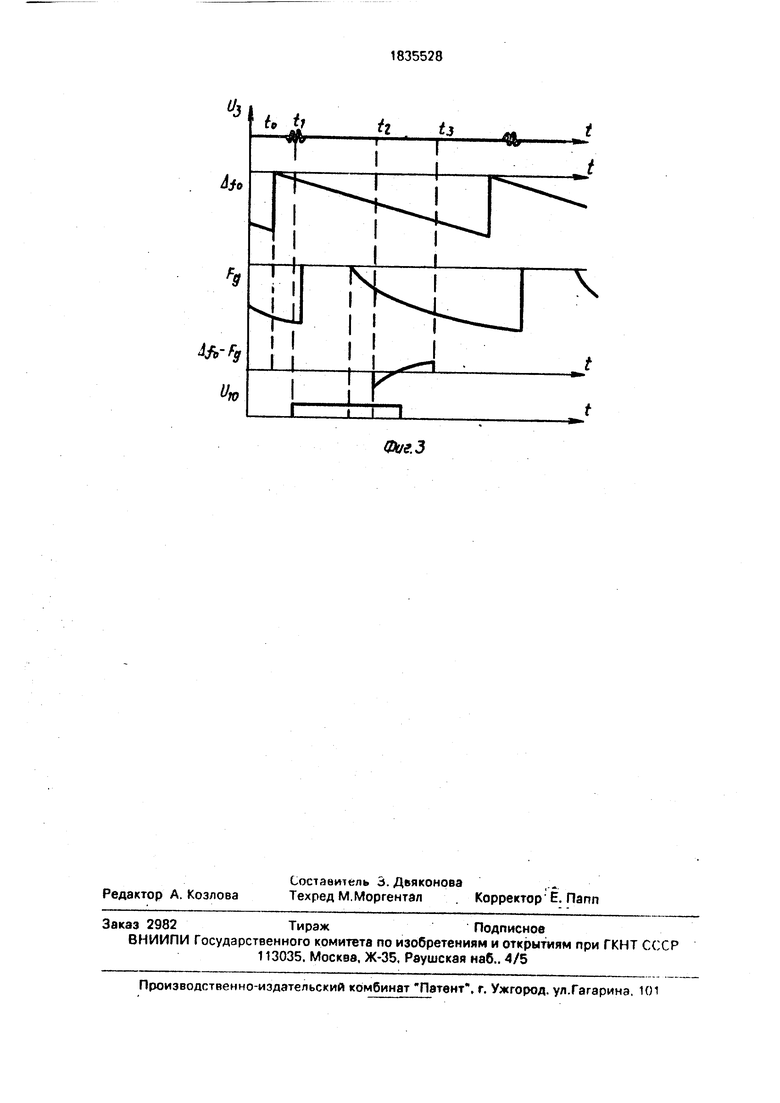
На фиг.1 схематично показано расположение измерителя действительной скорости на транспортном средстве: на фиг.2 структурная схема устройства для осуществления предложенного способа измерения; на фиг.З - временная диаграмма, поясняющая его работу.
Устройство 1 для измерения действительной скорости движения наземного транспортного средства 2 содержит передатчик 3. входное устройство А, блок определения разности частот или периодов 5.
0
входы которого подключены к выходам передатчика 3 и входного устройства 4, а выход через блок преобразования разности частот или периодов в напряжение б и первый выходной блок 7 подключен к первой
5 шине устройства и первому входу генератора пилообразного напряжения 8, второй вход и выход которого подключены соответственно к первому входу передатчика 3 и первому выходу тактового генератора 9,
0 второй выход которого подключен ко второму входу передатчика 3, и второй выходной блок 10. выход которого подключен ко вто- рой выходной шине устройства, а первый и второй входы соединены соответственно
5 с выходом блока преобразования разности частот или периодов в напряжение б и выходом тактового генератора 9.
Первый выходной блок 7 может быть выполнен в виде интегратора.
0 Передатчика 3 может содержать управляемый генератор 11, коммутатор (амплитудный модулятор) 12 и усилитель мощности 13. Генератор пилообразного напряжения 8 может быть выполнен на базе преобразова5 теля напряжения в-ток (управляемого источника тока) 14, интегратора 15 и разрядного ключа 16. Тактовый генератор 9 может содержать генератор прямоугольных импульсов 17, счетчик 18 и дешифратор 19. Второй
0 выходной блок может быть выполнен в виде последовательно соединенных фильтра 20. компаратора 21 и триггера 22.
Входное устройство 4 выполнено в виде избирательного усилителя. При реализации
5 устройства в аналоговой форме блок жет быть выполнен в виде синхронного детектора (смесителя), при реализации в цифровой форме - в виде двух измерителей длительности периодов входных сигналов и
0 устройства вычитания результатов измерения этих периодов. Блок 6 преобразования разности частот или периодов в напряжение может быть выполнен в виде частотомера с двухполярным аналоговым выходом или
5 преобразователя кода разности частот или периодов в напряжение.
Поясним суть предложенного способа на примере работы устройства.
Передатчика 3 измерителя действительной скорости 1. расположенного на транспортном средстве 2, генерирует зондирующее излучение. Это излучение передается в направлении поверхности грунта (фиг.1). После отражения от поверхности грунта это излучение принимается приемной антенной входного устройства 4, также расположенной на транспортном средстве 2. В этом случае величина доплеровского сдвига частоты определяется по известной формуле
2 v
Г
cos а.,
где Рд - доплеровский сдвиг частоты;
А- длина волны зондирующего излучения,
а- угол, определяемый положением эффективной точки отражения зондирующего излучения на поверхности грунта,
v - действительная скорость движения транспортного средства. Из этой формулы следует, что
v
FnA
2 cos a
т.е. для точного определения действительной скорости необходимо им,еть точное значение угла а. Однако при отражении излучения от статистически шероховатой .грунтовой поверхности угол «изменяется произвольным образом в пределах ширины диаграммы направленности антенны (или акустического преобразователя). Отклонив угла а от ожидаемого значения на достаточно малый угол, например 5° (что лежит в пределах основного лепестка направленности антенны, устанавливаемых на транспортных средствах) приводит к возникновению ошибки измерения действительной скорости около 9%.
Для устранения этой погрешности в прототипе обеспечивается независимость результата измерения действительной скорости от положения эффективной точки отражения зондирующего излучения на грунтовой поверхности в направлении вектора скорости транспортного средства.
В момент времени t0 (фиг.З) тактовый генератор 9. построенный по принципу распределителя импульсов, формирует короткий импульс управления разрядным ключом 16 генератора пилообразного напряжения 8. С этого момента времени начинается очередной модуляционной интервал измерителя. Управляемый генератор 11 передатчика 3 (фиг.2) работает в режиме непрерывной генерации высокочастотных колебаний фиксированной амплитуды. Частота этих колебаний (на фиг.З показано отклонение этой частоты от исходного значения - Дт0) изменяется по линейному закону в зависимости от выходного сигнала генератора пилооб- 5 разного напряжения 8
где k - скорость изменения частоты,
В момент времени ti (фиг.З) тактовый генератор 9 формирует короткий импульс, 0 управляющий комм/татором 12. На вход усилителя мощности 13 подключается выходной сигнал управляемого генератора 11 и передатчик 3 при помощи передающей антенны (акустического преобразователя) 5 излучает короткий зондирующий импульс. Этот импульс распространяется во всех на- правлениях, соответствующих углам рас- крыва главного лепестка диаграммы направленности антенны:
0 (фиг.1).
В момент времени t2 зондирующее излучение, отдаленное от точки а грунтовой поверхности (фиг.1), достигает приемной антенны. В этот момент времени принима5 ется только сигнал, отраженный от точки а, т.к. более близкие к транспортному средству 2 участки грунтовой поверхности лежат вне главного лепестка диаграммы направленности антенны, а прием
0 от более дальних участков поверхности соответствует большему времени распространения зондирующего излучения. Величина доплеровского сдвига частоты в этот млмент времени пропорциональна coscti .
5 Если предположить, что длительность зондирующего импульса значительно меньше разности времени распространения излучения от транспбртного средства 2 до точки в и обратно и от транспортного средства
0 2 до точки а и обратно, то в момент времени гз будет осуществляться прием излучения, отраженного от точки в. Величи- она доплеровского сдвига частоты в этом случае будет пропорциональна cos аг .
5 в любой промежуток времени между t2 и ta будет осуществляться прием излучения от некоторой промежуточной точки, распо-. ложенной между точками а и в и соответственно величина доплеровского сдвига
0 частоты будет иметь промежуточное значение cos «1 cos 02 , поэтому величина доплеровского сдвига частоты с течением времени будет возрастать.
Из геометрических, соображений сто5 роны треугольника Н и ct) следует, что в общем случае
cosa(t) v 1
V 1 4 fT
1 1
r r
где Н - высота установки измерителя 1 на транспортном средстве 2,
с-скорость распространения зондирующего излучения.
Соответственно доплеровский сдвиг частоты:
2v
РдЮ1
4НГ t2
В предложенном техническом решении осуществляется вычитание частот переданного и принятого сигналов (в блоке 5). преобразование этой разности в напряжение (в блоке 6), интегрирование (в первом выходном блоке 7) и изменение глубины модуляции (коэффициента К) до равенства нулю среднего значения указанной разности
-kt)
После интегрирования и подстановки пределов интегрирования t2 2H/csln а., t3 2H/csIn 03 при среднем значении направления распространения зондирующего излучения 45°, т.;е при (а. + «2), получим
2 Н А tg Да
с cos Да (2 tg Да- Да)
где Да - а ccz
При Да 10° величина множителя tg Да/cos Aa(2tg Да- Да) отличается от единицы не более чем на 0,5%. Поэтому с достаточной степенью точности
2 hA
Величина коэффициента К с точностью до постоянных коэффициентов отражает величину действительной скорости движения транспортного средства 2.
При изменении направления распространения зондирующего излучения произ- вольынм образом в интервале 40° а 50° результат измерения изменяется не более чем на 0.5%, т.е. обеспечивается независимость результата измерения действительной скорости от положения эффективной точки отражения зондирующего излучения на грунтовой ловерхности. Для сравнения отметим, что в измерителе скорости, построенном без изменения глубины модуляции, изменение угла о. в тех же пределах приводит к изменению результата измерения на +10-80%.
Среднее значение выходного сигнала блока преобразования разности частот или
периодов в напряжение 6 (фиг.З, ДГ0-Рд) равно нулю. Однако, как это следует из приведенных функциональных зависимостей, в момент времени ta доплеровский сдвиг частоты изменяется более интенсивно, чем в момент времени t3. Соответственно напряжение на выходе блока б в момент времени имеет отрицательную величину и далее знак этого напряжения изменяется
0 на противоположный, т.е. имеется минимум действующего значения напряжения (промежуточного сигнала). Этот минимум соответствует направлению распространения .зондирующего излучения около 45°.
5 Следовательно, фиксируя временное положение этого минимума, можно определить расстояние до грунтовой поверхности во вполне определенном направлении (45°). Одновременно с формированием им0 пульса зондирующего излучения тактовый генератор 9 осуществляет установку триггера 22 второго выходного блока 10 (фиг.З, U 10). Выходной сигнал блока преобразования разности частот или периодов 6 через
5 фильтр нижних частот 20 поступает на вход компаратора 21, формирующего прямоугольные импульсы в момент перехода сигнала через нулевой уровень. Фильтр 20 предназначен для уменьшения влияния
0 флуктуации частоты принимаемого сигнала, вызванных статистической шероховатостью грунтовой поверхности. С целью предотвращения ложного срабатывания триггера 22 в момент появления принимаемого сигнала
5 (момент времени t2) выход компаратора подключен не к входу сброса, к входу синхронизации триггера 22 (триггер по входу с не реагирует на задний фронт сигнала). В момент перехода выходного сигнала блока
0 б из отрицательной в положительную область значений напряжения компаратор 21 формирует передний фронт импульса синхронизации триггера 22, триггер 22 сбрасывается и в результате на выходе
5 второго выходного блока формируются импульсы, длительность которых равна интервалу времени от момент передачи зондирующего импульса до момента достижения минимума промежуточного сигна0 ла. Эта длительность равна времени прохождения зондирующим излучением расстояния от точки крепления измерителя на транспортном средстве и обратно, т.е. пропорциональна дальности до грунтовой
5 поверхности.
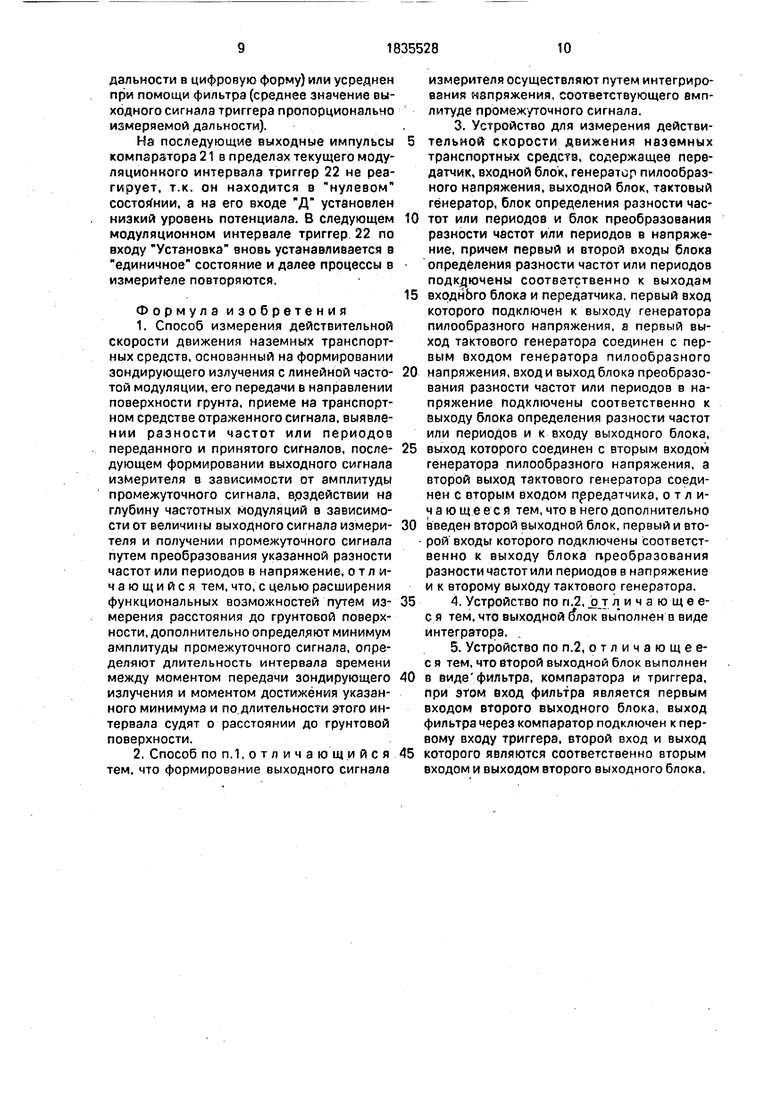
В зависимости от назначения сигнала, несущего информацию о дальности, выходной импульс триггера может быть использован в качестве измерительного интервала (при преобразовании результата измерения
дальности в цифровую форму) или усреднен при помощи фильтра (среднее значение выходного сигнала триггера пропорционально измеряемой дальности).
На последующие выходные импульсы компаратора 21 в пределах текущего модуляционного интервала триггер 22 не реагирует, т.к. он находится в нулевом состоянии, а на его входе Д установлен низкий уровень потенциала. В следующем модуляционном интервале триггер 22 по входу Установка вновь устанавливается в единичное состояние и далее процессы в измерителе повторяются.
Формула изобретения
1.Способ измерения действительной скорости движения наземных транспортных средств, основанный на формировании зондирующего излучения с линейной часто- той модуляции, его передачи в направлении поверхности грунта, приеме на транспортном средстве отраженного сигнала, выявле- нии разности частот или периодов переданного и принятого сигналов, после- дующем формировании выходного сигнала измерителя в зависимости от амплитуды промежуточного сигнала, врздействии на глубину частотных модуляций в зависимости от величины выходного сигнала измери- теля и получении промежуточного сигнала путем преобразования указанной разности частот или периодов в напряжение, отличающийся тем, что, с целью расширения функциональных возможностей путем из- мерения расстояния до грунтовой поверхности, дополнительно определяют минимум амплитуды промежуточного сигнала, определяют длительность интервала эремени между моментом передачи зондирующего излучения и моментом достижения указанного минимума и по.длительности этого интервала судят о расстоянии до грунтовой поверхности.
2.Способ по п. 1,отличающийся тем, что формирование выходного сигнала
измерителя осуществляют путем интегрирования напряжения, соответствующего амплитуде промежуточного сигнала.
3.Устройство для измерения действительной скорости движения наземных транспортных средств, содержащее передатчик, входной блок, генератор пилообразного напряжения, выходной блок, тактовый генератор, блок определения разности частот или периодов и блок преобразования разности частот или периодов в напряжение, причем первый и второй входы блока определения разности частот или периодов подключены соответственно к выходам входного блока и передатчика, первый вход которого подключен к выходу генератора пилообразного напряжения, а первый выход тактового генератора соединен с первым входом генератора пилообразного напряжения, входи выход блока преобразования разности частот или периодов в напряжение подключены соответственно к выходу блока определения разности частот или периодов и к входу выходного блока, выход которого соединен с вторым входом генератора пилообразного напряжения, а второй выход тактоеого генератора соединен с вторым входом передатчика, отличаю щ е ее и тем, что в него дополнительно введен второй выходной блок, первый и второй входы которого подключены соответственно к выходу блока преобразования разности частот или периодов в напряжение и к второму выходу тактового генератора.
4.Устройство по п.2, jorr л и ч а ю щ е е- с я тем. что выходной выполнен в виде интегратора,
5.Устройство по п.2, отличающее- с я тем, что второй выходной блок выполнен в виде фильтра, компаратора и триггера, при этом вход фильтра является первым входом второго выходного блока, выход фильтра через компаратор подключен к первому входу триггера, второй вход и выход которого являются соответственно вторым входом и выходом второго выходного блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения действительной скорости движения наземных транспортных средств и устройство для его осуществления | 1984 |
|
SU1278719A1 |
| Устройство измерения скорости движения землеройно-транспортных и сельскохозяйственных машин | 1985 |
|
SU1377794A1 |
| РАДИОЛОКАТОР | 2000 |
|
RU2178185C2 |
| БОРТОВОЙ ОБНАРУЖИТЕЛЬ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ | 2019 |
|
RU2710363C1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2805901C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ ЛОКАЦИИ В РАДИОЛОКАЦИОННЫХ ДАТЧИКАХ С ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ РАДИОВОЛН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2695799C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2186696C1 |
| Способ измерения рабочей скорости почвообрабатывающих и землеройно-транспортных машин | 1990 |
|
SU1723267A1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2022 |
|
RU2793338C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 1992 |
|
RU2027195C1 |
Изобретение относится ка измерительной технике, в частности к доплеровским, преимущественно ультразвуковым, измерителям действительной скорости движения транспортных средств. Цель изобретения - расширение функциональных возможностей путем измерения расстояния до грунтовой поверхности. В способе формируется импульс зондирующего излучения с линейной частотной модуляцией, определяется рассогласование частот принимаемого сигнала и сигнала генератора с линейно-изменяющейся частотой. Далее в зависимости от рассогласования корректируется глубина частотной модуляции генератора (передатчика). О величине действительной скорости судят по скорости изменения частоты передатчика. Выявляется момент времени, когда указанное рассогласование частот достигает минимального значения и по длительности интервала времени между моментом передачи зондирующего импульса и моментом достижения указанного минимума судят о расстоянии до отражающей поврехности. Для осуществления способа в устройство дополнительно введен второй выходной блок 10,- первый и второй входы которого подключены соответственно к выходу блока преобразования разности частот или периодов в напряжение 6 и ко второму выходу тактового генератора 9. 2 с. и 3 з.п. ф-лы, 3 ил. v Ё
Фие.З
| Способ измерения действительной скорости движения наземных транспортных средств и устройство для его осуществления | 1984 |
|
SU1278719A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
