1
Изобретение относится к текстильному машиностроению и может быть использовано на ткацких станках.
Целью изобретения является расширение технологических возможностей путем обеспечения выработки тканей г дискретным изменением плотности по утку на отдельных участках и плавным изменением плотности по утку в пределах каждого из участков,
На фиг. 1 представлена кинематическая схема товарного регулятора ткацкого станка; на фиг. 2-4 - варианты расположения утка в ткани.
Товарный регулятор ткацкого стан- ка содержит вальян 1, кинематически связанный посредством набора шестерен 2-7 с приводом, включающим храповой механизм, собачки 8 и 9 которого соединены с лопастью 10 батана. Собачки 8 и 9 установлены на лопасти 10 по одну сторону от храпового колеса 11 таким образом, что расстояние до оси 12 подбатанного вала от оси 13 вращения подающей собачки 8 в два раза больше, чем расстояние до оси 12 подбатанного вала от оси 14 вращения подающей собачки 9. Товарный регулятор имеет приспособление для дискретного изменения плотности ткани по утку на участках произвольной длины и плавного изменения плотности по утку в пределах каждого участка. Это приспособление имеет программный механизм, переключатель
подающих собачек 8 и 9 храпового механизма привода, кинематически связанный с последним, и установленные
на торцах вальяна 1 пластина 15 с дуговыми прорезями 16. При этом ведомое колесо 2 установлено на пластине 1 5 и имеет прорезь 16 для прохода и перемещения в ней оси 17 вальяна 1
эксцентрично относительно оси вращения шестерни -2 набора в приводе регулятора.
Переключатель подающих собачек 8 и 9 имеет храповой механизм, подающая
собачка 18 которого соединена с лопастью 10 батана, и два диска 19 с равномерно расположенными по окружности роликами 20 для поочередного взаимодействия с подающими собачками 8 и 9 привода, при этом диски 19 установлены на одной оси 21 с храповым колесом 22 по одну сторону от него, а общее количество роликов 20 соответствует числу зубьев храпового колеса 22 и является четным. Подающая собачка 18 и подающие собачки 8 и 9 установлены по разные стороны от оси 12 подбатанного вала.
Программный механизм выполнен в виде картона ремизоподъемной каретки или жаккардовой машины (не показано) и связан посредством гибкой тяги 23 с собачкой 18. Собачки 8 и 9 подпружинены к храповому колесу 11 посредством пружин 24 и 25. Запирающая собачка 26 препятствует повороту храпо
вого колеса 11 в обратном направлении от рабочего хода. Пружина 27 прижимает подаювг/ю собачку 18 к храповому колесу 22 переключателя.
Товарный регулятор работает следующим образом.
Подающая собачка 18 получает ка- чательное движение в вертикальной плоскости от лопасти 10 батана, если гибкая связь 23 не воздействует на подающую собачку 18. При движении вверх совершается холостой ход собачки 18, а подающие собачки 8 и 9 со- |вершают рабочий ход, причем в зацеп- |лении с храповым колесом 11 находит- ся одна из собачек, например 9, а вторая собачка 8 отклоняется от храпвого колеса 11 в это время выступающим роликом 20 одного из дисков 19. ,При движении подающей собачки 18 вниз совершается ее рабочий ход и (холостой ход подающих собачек 8 и 9. |Храповое колесо 22 поворачивается 1 на один зуб и ролик 20 уже другого диска 19 отклоняет собачку 9 от храпового колеса 11, а другая подающая собачка 8 войдет в зацепление с храповым колесом 11 и при рабочем ходе поворачивает храповое колесо 11 на два зуба, в то время как подающая собачка 9 поворачивает храповое колесо 11 только на один зуб. Движение храпового колеса 11 через зубчатые колеса 2-7 передается пластине 15, которая лосредством болтов 28 и пальца 29 передает движение вальяну 1 При подъеме журавлика 30 ремизоподъемной каретки (не показано) гибкая связь 23 выводит подающую собачку 18 из зацепления с храповым колесом 22„ Движение журавлика 30 программируется программным механизмом. Возмож- . ность дискретного изменения плотности ткани по утку на участках различной длины ткани осуществляется воздействием журавлика на гибкую связь 23, благодаря чему подающая собачка 18 может включаться в работу и выключаться из работы в моменты времени, определяемые программным механизмом - картоном, воздействующим на журавлик 30, наличием двух собачек 8 и 9, имеющих различную величину рабочего хода и включающихся в работу попеременно, возможностью плавного изменения плотности ткани по утку, обеспечиваемой регулируемой величиной эксцентриситета оси вальяна.
0
5
Q 5 0
5
0
5
0
5
Для дискретного изменения плотности по утку храповик привода товар- jhtoro регулятора контактирует с одной из двух собачек, ход которых разный за счет того, что расстояние от оси вращения подбатанного вала оси вращения одной подающей собачки больше расстояния до оси вращения другой подающей собачки, и ход одной подающей собачки может быть равен одному зубу, а другой - двум зубьям. Это обеспечивает повышенную плотность на первом участке. При этом соотношение длин участков с разной плотностью по утку обеспечивается тем, что муфта переключения подающих собачек управляется от журавлика ремизоподъемной каретки и содержит четное число роликов, расположенных равномерно по окружности. Половина роликов управляет первой собачкой, а другая часть роликов - второй собачкой. Поэтому общее их число должно быть четным при наличии двух собачек.
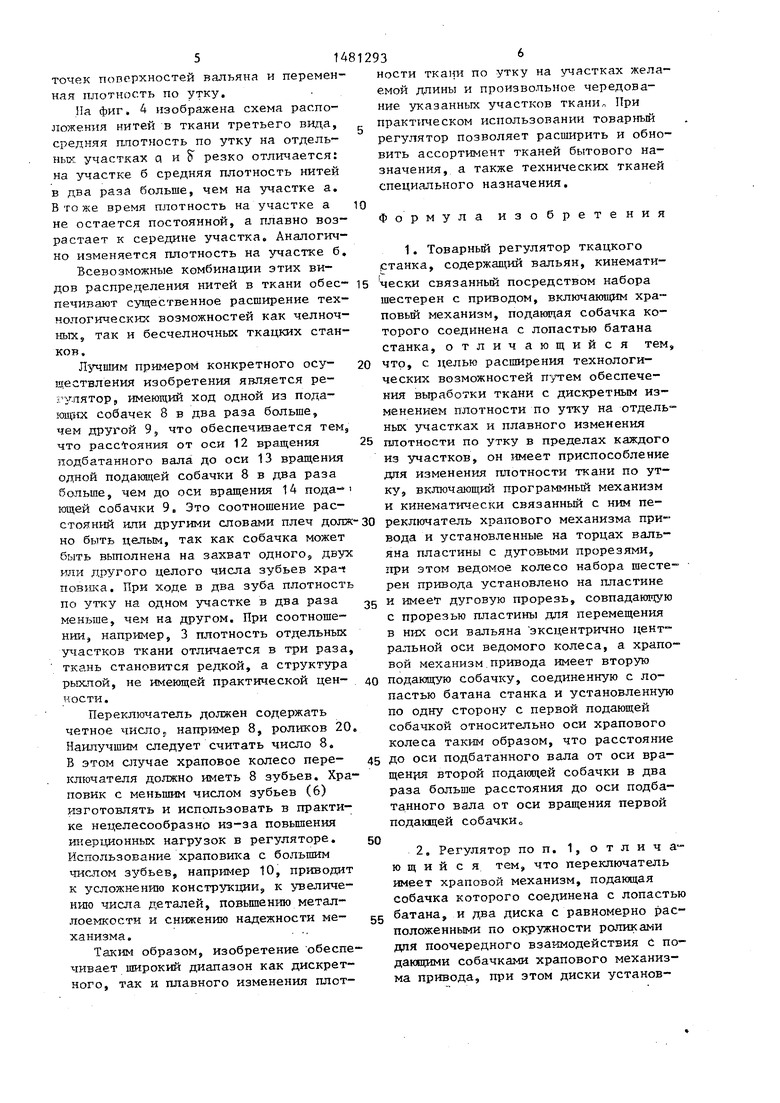
На фиг. 2 изображена схема расположения в ткани уточных нитей, изображенных вертикальными линиями. Предлагаемый товарный регулятор обеспечивает три вида распределения уточных нитей, первый из которых представлен на фиг. 2. Плотность уточных нитей на участке б в два раза больше их плотности на участке а. На границе между участками имеют место дискретг ные изменения плотности ткани по утку вследствие переключения подающих собачек 8 и 9. Вместо собачки 8 (фиг о 1) в работу включается собачка 9, которая имеет в два раза меньший ход и поворачивает храповик 11 только на один зуб. Соотношение длин участков q и S может быть произвольным Это зависит от положения переключателя, который управляется программой картона каретки или жаккардовой машины.
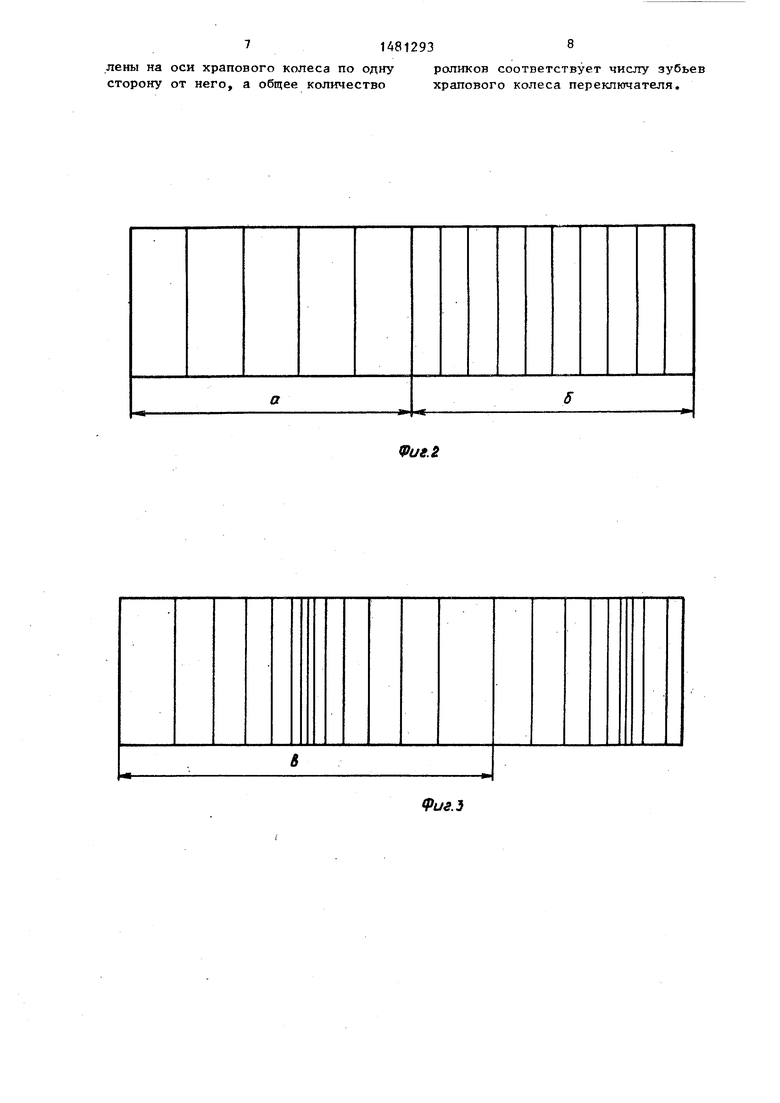
На фиг. 3 изображена схема расположения уточных нитей ткани второго вида, когда плотность по утку постепенно увеличивается, а затем постепенно уменьшается, достигая максимума в середине участка б. Конструктивно это обеспечивается наличием на обоих торцах вальяна пластин 15, установленных с возможностью смещения относительно центра оси вращения шестерни 2. Такой конструкцией достигается переменная окружная скорость
точек поверхностей вальяна и переменная плотность по утку.
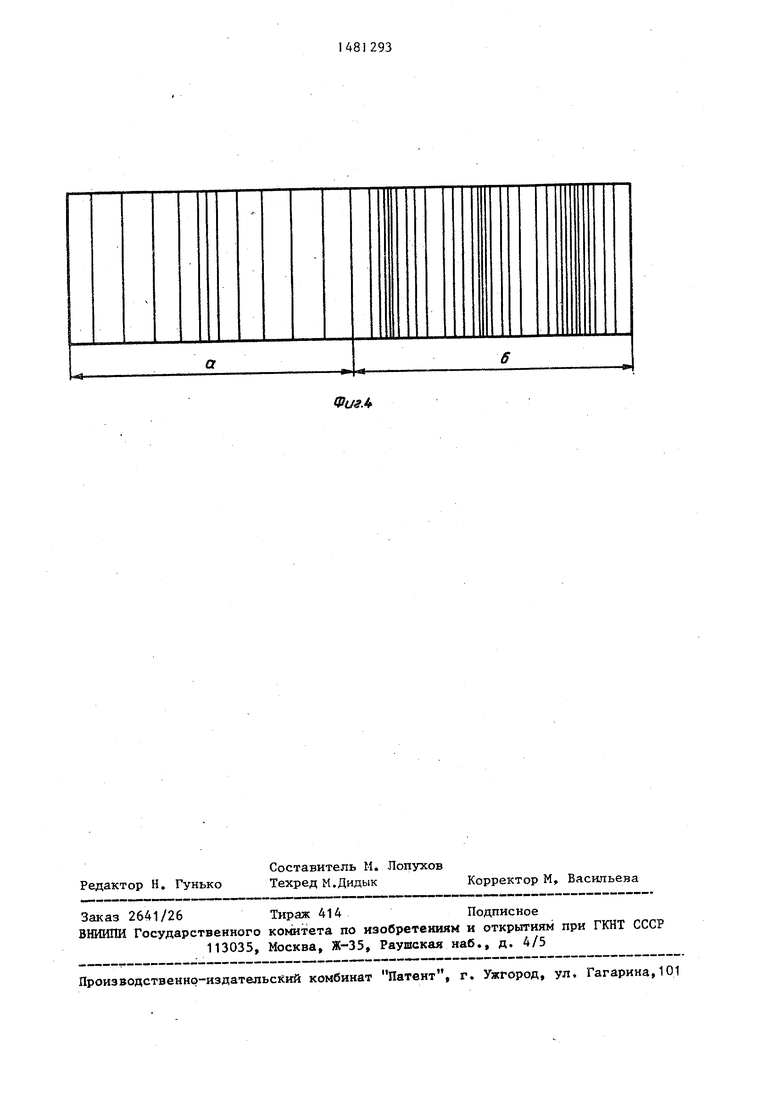
Па фиг. 4 изображена схема расположения нитей в ткани третьего вида, средняя плотность по утку на отдель ных участках а и резко отличается: на участке б средняя плотность нитей в два раза больше, чем на участке а. В то же время плотность на участке а не остается постоянной, а плавно возрастает к середине участка. Аналогично изменяется плотность на участке б.
Всевозможные комбинации этих видов распределения нитей в ткани обеспечивают существенное расширение технологических возможностей как челночных, так и бесчелночных ткацких станков.
Лучшим примером конкретного осу- шествления изобретения является ре- .- Улятор, имеющий ход одной из подающих собачек 8 в два раза больше, чем другой 9, что обеспечивается тем, что расстояния от оси 12 вращения лодбатанного вала до оси 13 вращения одной подающей собачки 8 в два раза больше, чем до оси вращения 14 пода- ющей собачки 9. Это соотношение расстояний или другими словами плеч долж но быть целым, так как собачка может быть выполнена на захват одного, двух или другого целого числа зубьев храч повика. При ходе в два зуба плотность по утку на одном участке в два раза меньше, чем на другом. При соотношении, например, 3 плотность отдельных участков ткани отличается в три раза, ткань становится редкой, а структура рыхлой, не имеющей практической ценности.
Переключатель должен содержать четное число., например 8, роликов 20, Наилучшим следует считать число 8. В этом случае храповое колесо переключателя должно иметь 8 зубьев. Храповик с меньшим числом зубьев (6) изготовлять и использовать в практике нецелесообразно из-за повышения инерционных нагрузок в регуляторе. Использование храповика с большим числом зубьев, например 10, приводит к усложнению конструкции, к увеличению числа деталей, повышению металлоемкости и снижению надежности механизма.
Таким образом, изобретение обеспечивает широкий диапазон как дискретного, так и плавного изменения плот
ности ткани по утку на участках желаемой длины и произвольное чередование указанных участков ткани„ При практическом использовании товарный регулятор позволяет расширить и обновить ассортимент тканей бытового назначения, а также технических тканей специального назначения.
Формула изобретения
0
5
0
5
1.Товарный регулятор ткацкого станка, содержащий вальян, кинематически связанный посредством набора шестерен с приводом, включающим хра повый механизм, подающая собачка которого соединена с лопастью батана станка, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения выработки ткани с дискретным изменением плотности по утку на отдельных участках и плавного изменения плотности по утку в пределах каждого из участков, он имеет приспособление для изменения плотности ткани по утку, включающий программный механизм
и кинематически связанный с ним переключатель храпового механизма привода и установленные на торцах вальяна пластины с дуговыми прорезями, при этом ведомое колесо набора шестерен привода установлено на пластине и имеет дуговую прорезь, совпадающую с прорезью пластины для перемещения в них оси вальяна эксцентрично центральной оси ведомого колеса, а храповой механизм привода имеет вторую
0 подающую собачку, соединенную с лопастью батана станка и установленную по одну сторону с первой подающей собачкой относительно оси храпового колеса таким образом, что расстояние
5 до оси подбатанного вала от оси вращения второй подающей собачки в два раза больше расстояния до оси подбатанного вала от оси вращения первой подающей собачки„
0
2.Регулятор по п. 1, отличающийся тем, что переключатель имеет храповой механизм, подающая собачка которого соединена с лопастью
5 батана, и два диска с равномерно расположенными по окружности роликами для поочередного взаимодействия с подающими собачками храпового механизма привода, при этом диски установлены на оси храпового колеса по одну сторону от него, а общее количество
роликов соответствует числу зубьев храпового колеса переключателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ткацкий станок | 1988 |
|
SU1567676A1 |
| Грудница ткацкого станка | 1983 |
|
SU1158629A1 |
| МЕХАНИЗМ ОТВОДА И НАВИВАНИЯ ТКАНИ НА ТКАЦКОМ СТАНКЕ | 1991 |
|
RU2016150C1 |
| ТОВАРНЫЙ РЕГУЛЯТОР ТКАЦКОГО СТАНКА | 1992 |
|
RU2040607C1 |
| Батанный механизм ткацкого станка | 1987 |
|
SU1416550A1 |
| Устройство для регулирования натяжения основы и ткани ткацкого станка | 1977 |
|
SU672242A1 |
| Ткацкий автомат для выработки бортовой ткани | 1960 |
|
SU137470A1 |
| ТОВАРНЫЙ РЕГУЛЯТОР ТКАЦКОГО СТАНКА, ПРЕИМУЩЕСТВЕННО РУЧНОГО | 1995 |
|
RU2147053C1 |
| Приспособление к ткацкому станку для получения чередующихся полос разной плотности по утку | 1935 |
|
SU46200A1 |
| Привод раздвижного берда ткацкого станка | 1977 |
|
SU737524A1 |
Изобретение относится к текстильному машиностроению, может быть использовано на ткацких станках и позволяет расширить технологические возможности путем обеспечения выработки тканей с дискретным изменением плотности по утку на отдельных участках и плавным изменением плотности по утку в пределах каждого из участков. Подающая собачка 18 получает качательное движение в вертикальной плоскости от лопасти 10 батана, если гибкая связь 23 не воздействует на подающую собачку 18. При движении вверх совершается холостой ход собачки 18, а подающие собачки 8 и 9 совершают рабочих ход, причем в зацеплении с храповым колесом 11 находится одна из собачек, например 9, а вторая собачка 8 отклоняется от храпового колеса 11 в это время выступающим роликом 20 одного из диска 19. При движении подающей собачки 18 вниз совершается ее рабочий ход подающей собачкой 8 и 9. Храповое колесо 22 повернется на один зуб и ролик 20 уже другого диска 19 отклоняет собачку 9 от храпового колеса 11, а другая подающая собачка 8 войдет в зацепление с храповым колесом 11 и при рабочем ходе повернет храповое колесо 11 на два зуба, в то время как подающая собачка 9 поворачивает храповое колесо 11 только на один зуб. Движение храпового колеса 11 через зубчатые колеса 2-7 передается пластине 15, которая посредством болтов 28 и пальца 29 передает движение вальяну 1. По команде программного механизма журавлик 30 ремизоподъемной каретки посредством гибкой связи 23 выводит подающую собачку 18 из зацепления с храповым колесом 22. 4 ил.
9ui.2
Фиг.З
| Товарный регулятор ткацкого станка | 1982 |
|
SU1101484A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Гордеев В.А | |||
| и др | |||
| Хлопкоткачество | |||
| - М.: Легкая и пищевая индустрия, 1982, с | |||
| Эксцентричный фильтр-пресс для отжатия торфяной массы, подвергшейся коагулированию и т.п. работ | 1924 |
|
SU203A1 |
