1
Изобретение относится к текстильному оборудованию и может быть использовано для регулирования процесса тканеобразования на ткацких станках.
.Для каждого вида ткани значение уработки строго регламентировано, так как связано с расходом сырья. Кроме того, величина уработки основной пряжи зависит от ее натяжения. Стабильность уработки основы на ткацком станке - это не только оптимальный расход сырья, но и наилучший технологический режим, обеспечивающий минимальную обрывность основы и наибольшую производительность.
Известны основные регуляторы и автоматические основные тормоза, предназначенные для поддержания постоянства заправочной величины натяжения. Однако полностью и качественно они не выполняют своих функций, так как в основном сконструированы без учета динамической составляющей натяжения основы 1. В тех случаях, когда динамическая составляющая и принимается во внимание, точный расчет ее не возможен из-за многообразия параметров, которые влияют на величину составляющей (плотность по утку, уработка, линейная плотность нитей, длина основы в заправке и т. д.) и изменяются в зависимости от типа ткани.
Известны также устройства для регулирования натяжения основной нити, принцип которых заключен в сравнении измеряемого и заданного значений натяжения и в передаче полученного сигнала на привод навоя 2. Применение подобных регулирующих систем ограничивается тем, что оптимальная величина натяжения для выработки данной ткани неизвестна, и заранее правильно определить ее, исходя из структуры ткани и системы станка, практически невозможно.
Таким образом, все эти устройства не позволяют оперативно вмешиваться в процесс ткачества в момент формирования ткани, в результате чего недостатки в их работе можно обнаружить лишь после снятия ткани со станка, когда структура ткани уже сформирована.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для регулирования
натяжения основы и ткани ткацкого станка, содержащее электрически соединенные с блоком управления датчики длины сработанной основы и наработанной ткани, состоящие из игольчатого барабана, кинематически связанного с ним зубчатого редуктора, на валу ведомой шестерни которого размещен экран бесконтактного выключателя, установленного с возможностью взаимодейстаия с экраном и кинематически связанного с ткацким станком исполнительного механизма 3.
Известное устр ойство позволяет оперативно вмешиваться в процесс тканеобразования, но не обеспечивает достаточной точности и качества регулирования процесса тканеобразования.
Целью изобретения является сокращение обрывности основных нитей, повышение равномерности ткани по структуре-и свойствам, т. е. повышение качества тканеобразования.
Указанная цель достигается тем, что в предлагаемом устройстве каждый датчик длины имеет электромагнит, установленный с возможностью взаимодействия с экраном, а исполнительный механизм имеет храповой механизм с двойным храповым колесом,шкив и двуплечий рычаг, соединенные один с другим посредством гибкой связи, электромагниты, установленные с возможностью взаимодействия с собачками храпового механизма, и кулису, один конец которой кинематически соединен с подбатанным валом, а на другом конце смонтированы собачки храпового механизма, при этом двойное храповое колесо и кулиса закреплены на ведущем валу планетарного механизма, а шкив на его ведомом валу, причем двуплечий рычаг соединен с лентой тормозного шкива.
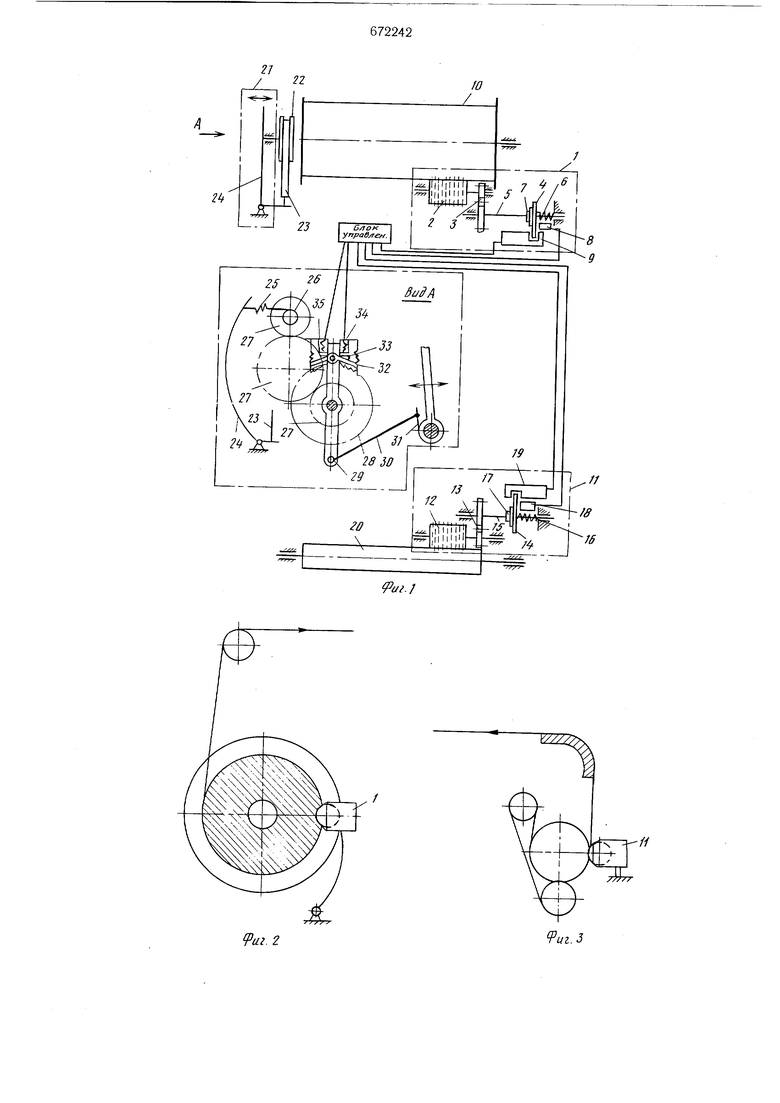
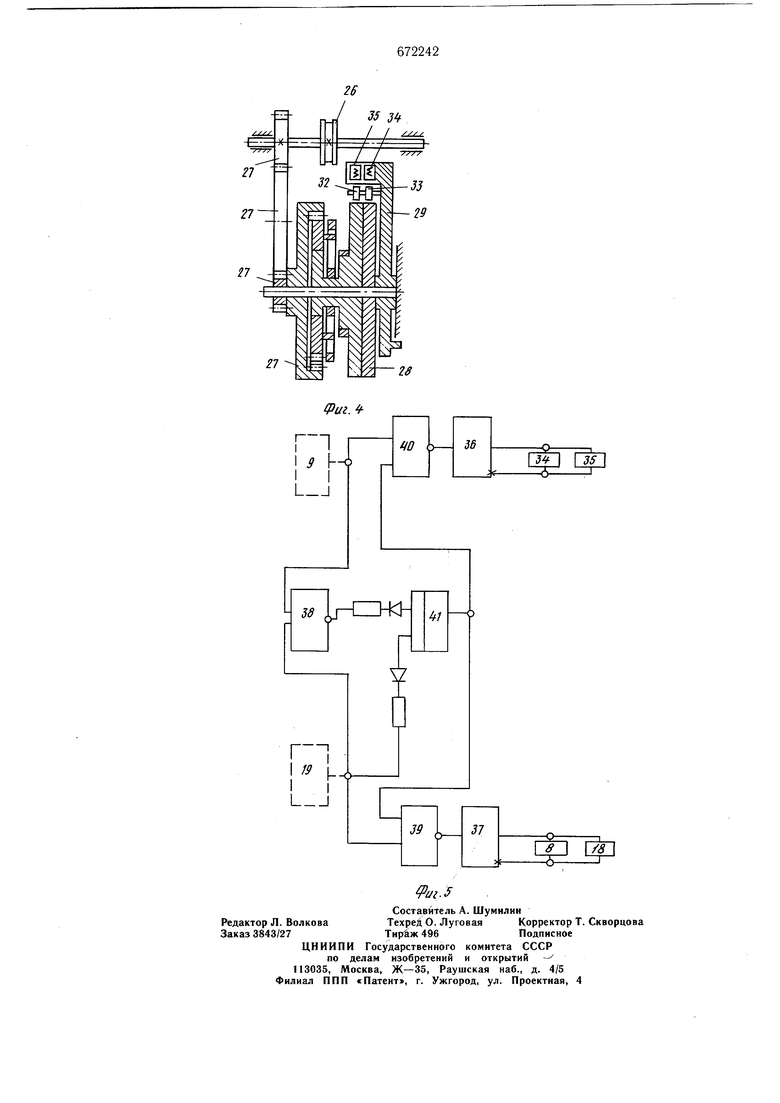
На фиг. 1 изображена кинематическая схема устройства и вид А; на фиг. 2 и 3 - схема крепления датчиков длины сработанной основы и наработанной ткани; на фиг.4 - кинематическая схема исполнительного механизма; на фиг. 5 - принципиальная схема блока управления.
Предлагаемое устройство содержит датчик 1 основы, включающий игольчатый барабанчик 2, зубчатый редуктор 3, экран 4, свободно сидяший на валике 5 и прижатый пружиной 6 к втулке 7, жестко сидящей на валике, электромагнит 8 и бесконтактный концевой выключатель 9.
Датчик основы монтируется на раме (не показано), закрытой кожухом, крепится на щупе и прижимается к поверхности навоя 10 (см. фиг. 2).
Устройство содержит также датчик 11 ткани, включающий игольчатый барабан 12, зубчатый редуктор 13, экран 14, валик 15, пружину 16, втулку 17, электромагнит 18 и бесконтактный выключатель 19. Датчик ткани крепится также к раме станка кронштейном и прижимается к поверхности вальяна 20 (см. фиг. 3).
Исполнительный механизм 21 состоит из тормозного шкива 22, охваченного лентой 23, двуплечего рычага 24, гибкой связи 25, шкива 26. Для передачи движения шкиву 26 может быть использована зубчатая передача с планетарным редуктором 27, двойной храповик 28 с противоположным направлением зубьев, кулиса 29, нижнее плечо которой связано через тягу 30 с пальцем 31. подбатанного вала, а верхнее несет на себе две храповые собачки 32 и 33, и два электромагнита 34 и 35. Электромагниты имеют подвижные якоря - плечи собачек 32 и 33. Исполнительный механизм с помошью кронштейнов крепится к раме ткацкого станка вместо основного диференциального тормоза или основного регулятора, причем в последнем случае скало неподвижное.
Блок управления состоит из бесконтактных выключателей 9 и 19, усилителей мощности 36 и 37, логических элементов ИЛИ-НЕ 38-40, триггера 41 и электромагнитов 8, 18, 34 и 35.
Устройство работает следующим образом.
Задание требуемого значения уработки основы производится путем соответствующего изменения передаточного отнощения зубчатого редуктора 3 (с помощью вариатора) датчика основы.
Движения от ткацкого навоя (основы) и вальяна (ткани) через игольчатые барабаны 2 и 12 и зубчатые редукторы 3 и 13 передаются на экраны 4 и 14. Если фактическая уработка основы равна заданной, то оба экрана одновременно входят в щели бесконтактных выключателей 9 и 19. Так как рассогласования сигналов нет, то на выходе триггера 41 блока управления появляется О и электромагниты не включаются. Сила натяжения ленты 23, а следовательно, тормозной момент на навое остается неизменным.
Если фактическая уработка не равна заданной, то в зависимости от отклонения уработки в прорезь бесконтактного выключателя входит экран соответствующего датчика. На входе логического элемента 39 и 40 появляется О, а на выходе - «.После усиления сигнала усилителем мощности 36 и 37 включаются электромагниты торможения экрана и исполнительного механизма. Например, уработка основы ниже заданной, что может быть вызвано ростом натяжения основных нитей. В этом случае израсходовалась меньшая длина основы, и экран 14 датчика II, опережая экран 4, входит в щель бесконтактного выключателя 19. От бесконтактного выключателя 19 через блок управления передается си/нал на одновременное замыкание электромагнитов 18 и 35.. Электромагнит 18 притягивает экран 14, благодаря чему движение валика 15 не передается на экран и последний удерживается в щели выключателя до тех пор, пока экран 4 не войдет в щель выключателя 9. Замкнутый электромагнит 35 притягивает плечо собачки 33, собачка опускается на храповик и под действием качательного движения, передаваемого от пальца 31 подбатанного вала, поворачивает храповик 28 против часовой стрелки, через редуктор 27 движение храповика передается на блок 26, который, поворачиваясь против часовой стрелки, ослабляет гибкую связь 25 и через двуплечий рычаг 24 уменьшает натяжение ленты 23. Тормозной момент уменьшается, что приводит к отпуску большей длины основы в рабочую зону. Это увеличивает уработки основы в следующем цикле. Если фактическое значение уработки выше заданной, то первым подает сигнал на блок управления бесконтактный выключатель 9, так как экран 4 раньше, чем экран 14 входит в щель выключателя. В этом случае одновременно замыкаются электромагниты 8 и 34, в результате чего храповик 28 поворачивается по часовой стрелке, увеличивая натяжение основы и уменьщая ее уработку. Длите тьность работы собачек и поворота храповика зависит от величины рассогласования положения экранов относительно выключателей. KaiK только запаздывающий экран входит в щель своего выключателя, через блок управления размыкаются оба электромагнита. В это время на входе элемента 38 появляются два «О, на выходе триггера 41 - «1, на выходе элементов 39 или 40 - «О. Процесс регулирования заканчивается. При выходе экранов датчиков из прорезей бесконтактных выключателей триггер 41 устанавливается в исходное соетояние, на выходе его появляется «О. Предлагаемое устройство уменьшает обрывность нитей основы на 10-30%, улучщает качество и повышает равномерность ткани на 20-30%. Формула изобретения Устройство для регулирования натяжения основы и ткани ткацкого станка, содержащее электрически соединенные с блоком управления датчики длины сработанной основы и наработанной ткани, каждый из которых состоит из игольчатого барабана, жинематически связанного с ним зубчатого редуктора, на ведомом валу которого размещен экран бесконтактного выключателя, установленного с возможностью взаимодействия с экраном и кинематически связанного со станком исполнительного механизма, включающего тормозной шкив и охватываюшую его ленту, отличающееся тем, что, с целью повышения качества выработываемой ткани, каждый датчик длины имеет электромагнит, установленный с возможностью взаимодействия с экраном, а исполнительный механизм имеет храповой механизм с двойным храповым колесом, шкив и двуплечий рычаг, соединенные один с другим посредством гибкой связи, электромагниты, установленные с возможностью взаимодействия с собачками храпового механизма, и кулису, один конец которой кине-. матически соединен с подбатанным валом, а на другом конце смонтированы собачки храпового механизма, при этом двойное храповое колесо и кулиса закреплены на ведущем валу планетарного механизма, а шкив- на его ведомом валу, причем двуплечий рычаг соединен с лентой тормозного щкива. Источники информации, принятые во вниание при экспертизе 1. Горднеев В. А. Динамика механизмов отпуска и натяжения основы ткацких станков, М., 1965. 2.Патент США № 3125122, кл. 139-97, 1964. 3.Текстильная промыщленность, № 3, 1976.
r
/8
J6

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения основы и ткани на ткацком станке | 1978 |
|
SU785391A1 |
| Устройство для регулирования натяжения основы и ткани на ткацком станке | 1980 |
|
SU922201A1 |
| Устройство для регулирования натяжения основы и ткани на ткацком станке | 1983 |
|
SU1090768A1 |
| Устройство для регулирования натяжения основных нитей на ткацком станке | 1980 |
|
SU912787A1 |
| Устройство для регулирования натяжения основы и ткани на ткацком станке | 1986 |
|
SU1350200A2 |
| Устройство для регулирования натяжения основы и ткани на ткацком станке | 1982 |
|
SU1038392A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ УРАБОТКИ ПРЯЖИ НА ТКАЦКОМСТАНКЕ | 1968 |
|
SU211414A1 |
| Устройство для регулирования натяжения основы и ткани на ткацком станке | 1988 |
|
SU1548295A1 |
| МЕХАНИЗМ ОТВОДА И НАВИВАНИЯ ТКАНИ НА ТКАЦКОМ СТАНКЕ | 1991 |
|
RU2016150C1 |
| РЕГУЛЯТОР НАТЯЖЕНИЯ НИТЕЙ ОСНОВЫ | 1970 |
|
SU272159A1 |