Изобретение относится к приборостроению, в частности к управлению натяжением магнитной ленты в лентопротяжном механизме аппарата магнитной записи, и может быть реализовано преимущественно при построении аппаратов точной магнитной записи с широким диапазоном скоростей движения магнитной ленты.
Цель изобретения - повышение точности регулирования натяжением магнитной ленты при расширении диапазона скоростей ее движения.
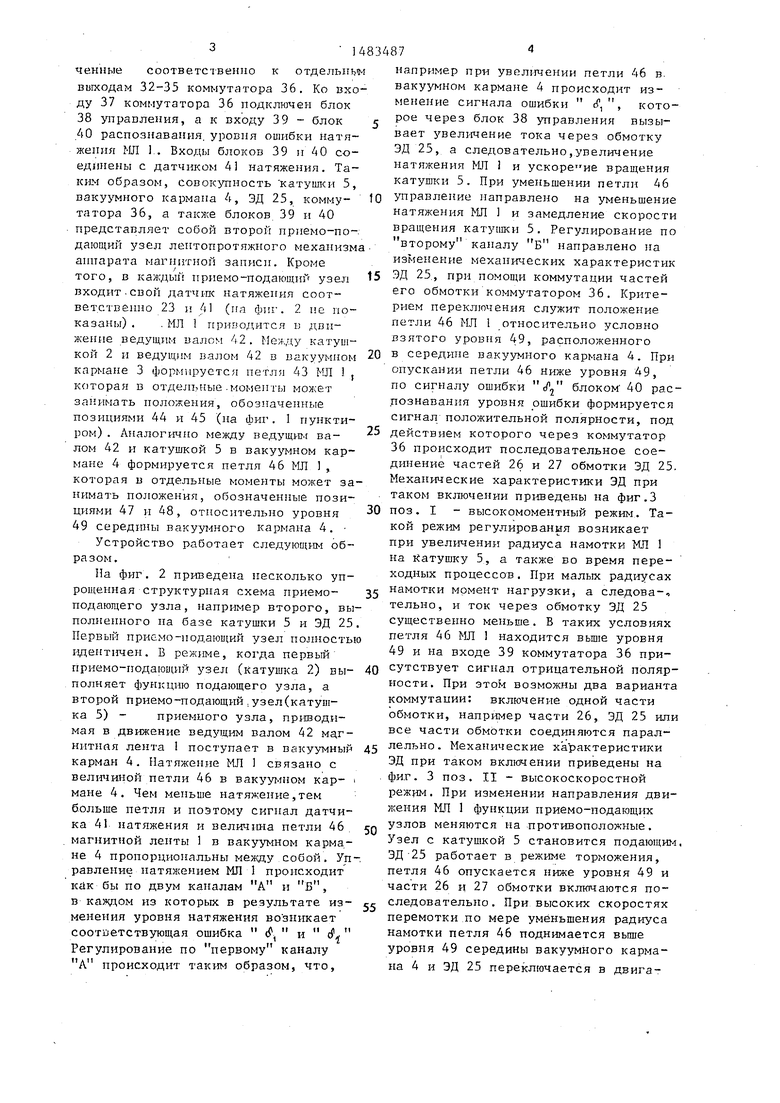
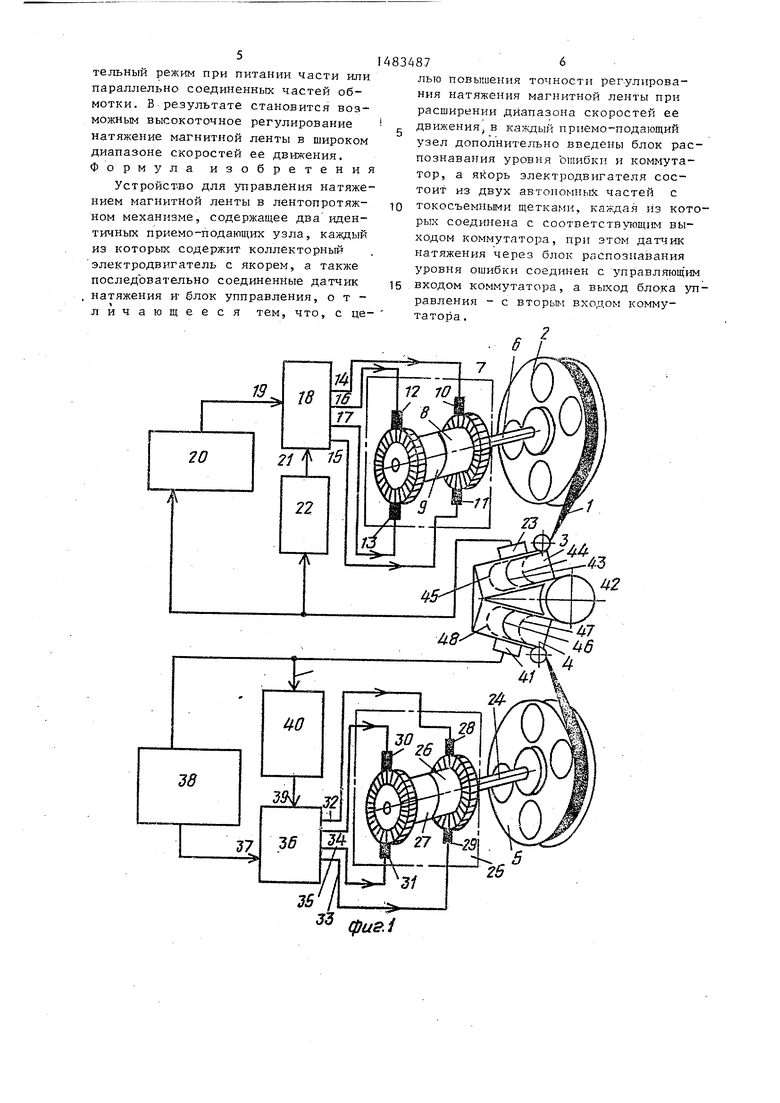
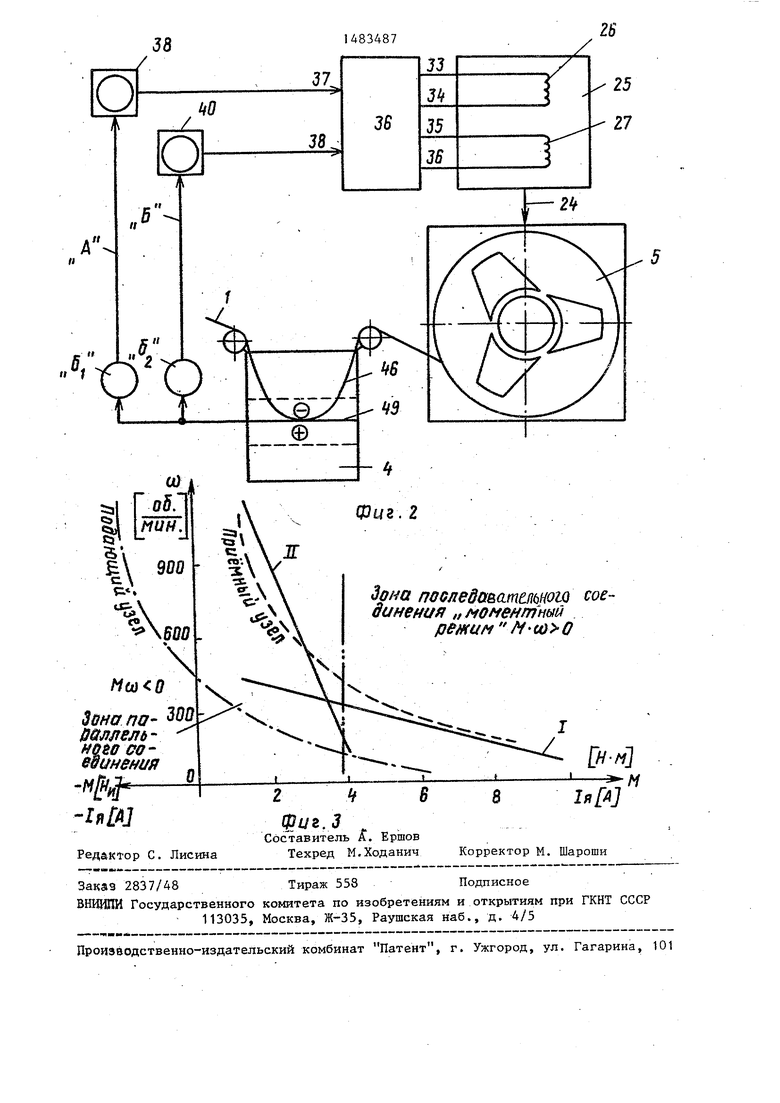
На фиг. 1 показана структурная . схема предлагаемого устройства в целом на фиг. 2 - структурная схема одного из приемо-подающих узлов; на фиг. 3 - механические характеристики каждого приемо-подающего узла с учетом свойств электродвигателя постоянного тока.
Устройство содержит магнитную ленту (МЛ) 1, расположенную на катушке 2, в вакуумных карманах 3 и 4, а также на катушке 5. Катушка 2 кинематически связана с валом 6 электродвигателя (ЭД) 7, обмотка которого состоит из двух самостоятельных 8 и 9 частей, каждая из которых имеет свои токосъемные щетки 10-13, подключенные соответственно, к отдельным выходам 14-17 коммутатора 18. К входу 19 коммутатора 18 подключен блок 20 управления, а к входу 21 - блок 22 распознавания уровня ошибки натяжения МЛ 1. Входы блоков 20 и 22 соединены с входом датчика 23 натяжения. Совокупность катушки 2, вакуумного кармана 3, ЭД 7, коммутатора 18, а также блоков 20 и 22 представляет собой первый приемо-подающий узел. Аналогично построен и второй приемо-подаю- щий узел. Он содержит катушку 5, кинематически связанную с валом 24 ЭД 25, обмотка якоря которого состоит из двух самостоятельных 26 и 27 частей, каждая из которых имеет свои токосъемные щетки 28-31, подклг.(Л
4 00 СО Јь
оо
ченные соответственно к отдельнъм выходам 32-35 коммутатора 36. Ко входу 37 коммутатора 36 подключен блок 38 управления, а к входу 39 - блок 40 распознавания уровня ошибки натяжения МЛ 1. Входы блоков 39 и 40 соединены с датчиком 41 натяжения. Таким образом, совокупность катушки 5, вакуумного кармана 4, ЗД 25, комму- татора 36, а также блоков 39 и 40 представляет собой второй приемо-по- дающий узел лентопротяжного механизм аппарата магнитной записи. Кроме того, в каждый приемо-подающий узел входит своп датчик натяжения соответственно 23 и 41 (на фиг. 2 пс показаны) . МЛ 1 приводится и движение ведущий валом 42. Мелду катушкой 2 и ведущим валом 42 в вакуумном кармане 3 формируется петля 43 FJI 1 , которая в отдельные монеты может занимать положения, обозначенные позициями 44 и 45 (на фиг. 1 пунктиром) . Аналогично между ведущим валом 42 и катушкой 5 в вакуумном кармане 4 формируется петля 46 МЛ 1, которая в отдельные моменты может занимать положения, обозначенные позициями 47 и 48, относительно уровня 49 середины вакуумного кармана 4.
Устройство работает следующим образом.
На фиг. 2 приведена несколько упрощенная структурная схема приеме- подающего узла, например второго, выполненного на базе катушки 5 и ЭД 25 Первый присмо-исдающий узел полность идентичен. В режиме, когда первый приемо-подающий узел (катушка 2) вы- полняет функцию подающего узла, а второй приемо-подающий узел(катуш- ка 5) - приемного узла, приводимая в движение ведущим валом 42 магнитная лента 1 поступает в вакуумный карман 4. Натяжение МЛ 1 связано с величиной петли 46 в вакуумном кар- мане 4. Чем меньше натяжение,тем больше петля и поэтому сигнал датчика 41 натяжения и величина петли 46 магнитной ленты 1 в вакуумном кармане 4 пропорциональны между собой. Управление натяжением МЛ 1 происходит как бы по двум каналам А и Б, в каждом из которых в результате из- менения уровня натяжения возникает соотиетствующая ошибка , и cf Регулирование по первому каналу А происходит таким образом, что,
5
0
5
O 0
5 0 5 0 $
например при увеличении петли 46 в вакуумном кармане 4 происходит изменение сигнала ошибки rf, , которое через блок 38 управления вызывает увеличение тока через обмотку ЭД 25, а следовательно,увеличение натяжения МЛ 1 и ускоре ие вращения катушки 5. При уменьшении петли 46 управление направлено на уменьшение натяжения МЛ 1 и замедление скорости вращения катушки 5. Регулирование по второму каналу Б направлено на изменение механических характеристик ЭД 25, при помощи коммутации частей его обмотки коммутатором 36. Критерием переключения служит положение петли 46 МЛ 1 относительно условно взятого уровня 49, расположенного в середине вакуумного кармана 4. При опускании петли 46 ниже уровня 49, по сигналу ошибки с/ блоком 40 распознавания уровня ошибки формируется сигнал положительной полярности, под действием которого через коммутатор 36 происходит последовательное соединение частей 26 и 27 обмотки ЭД 25. Механические характеристики ЭД при таком включении приведены на фиг.З поз. I - высокомоментный режим. Такой режим регулирования возникает при увеличении радиуса намотки МЛ 1 на катушку 5, а также во время переходных процессов. При малых радиусах намотки момент нагрузки, а следова-, тельно, и ток через обмотку ЭД 25 существенно меньше. В таких условиях петля 46 МЛ 1 находится выше уровня 49 и на входе 39 коммутатора 36 присутствует сигнал отрицательной полярности. При этом возможны два варианта коммутации: включение одной части обмотки, например части 26, ЭД 25 или все части обмотки соединяются параллельно. Механические характеристики ЭД при таком включении приведены на фиг. 3 поз. II - высокоскоростной режим. При изменении направления дви- жепия МЛ 1 функции приемо-подающих узлов меняются на противоположные. Узел с катушкой 5 становится подающим, ЭД 25 работает в режиме торможения, петля 46 опускается ниже уровня 49 и части 26 и 27 обмотки включаются последовательно . При высоких скоростях перемотки по мере уменьшения радиуса намотки петля 46 поднимается выше уровня 49 середины вакуумного кармана 4 и ЭД 25 переключается в двигафи&1
Ма)0
Зона па- 30Ј Хмельном со- жинения
-НА
С. Лисина
Шиь.З f
Составитель А. Ершов Техред М.Ходанич
Фиг. 2
Зона последа&атшноы сое- синения „момент ный ремим
н-м
In А
м
Корректор М. Шароши
| название | год | авторы | номер документа |
|---|---|---|---|
| Лентопротяжный механизм | 1981 |
|
SU978191A2 |
| Лентопротяжный механизм | 1977 |
|
SU699562A2 |
| Лентопротяжный механизм | 1979 |
|
SU838730A1 |
| Лентопротяжный механизм | 1976 |
|
SU574766A1 |
| Лентопротяжный механизм | 1989 |
|
SU1767527A1 |
| Лентопротяжный механизм для видеомагнитофона | 1975 |
|
SU792289A1 |
| Лентопротяжный механизм | 1974 |
|
SU493799A1 |
| КАССЕТА МАГНИТНОЙ ЛЕНТЫ С БЛОКОМ ЗАПРАВОЧНОГО КОНЦА ЛЕНТЫ И ШТИФТОМ БЛОКА ЗАПРАВОЧНОГО КОНЦА ЛЕНТЫ ВТОРОГО ПОКОЛЕНИЯ | 1993 |
|
RU2123729C1 |
| Устройство для управления скоростью перемещения магнитной ленты | 1982 |
|
SU1062779A2 |
| Аппарат магнитной записи | 1983 |
|
SU1081662A1 |
Изобретение относится к приборостроению, в частности к управлению натяжением магнитной ленты в лентопротяжном механизме аппарата магнитной записи. Изобретение позволяет повысить точность регулирования натяжения магнитной ленты при расширении диапазона скоростей ее движения. В устройстве осуществляется управление по сигналу датчика натяжения с одновременной адаптацией передаточной характеристики электродвигателя по скорости и моменту. 3 ил.
| Патент США № 3713606, кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
