Протезы бедра с гидравлической системой, содержащие насэс, гидробачок и гидроаккумулятор, известны. В предлагаемом протезе в отпичие от известных применено распределительное устройство из двух независимых клапанов, управляемых биотоками мышц. Такое устройство протеза позволит произвольно и плавно управлять движениями коленного механизма.
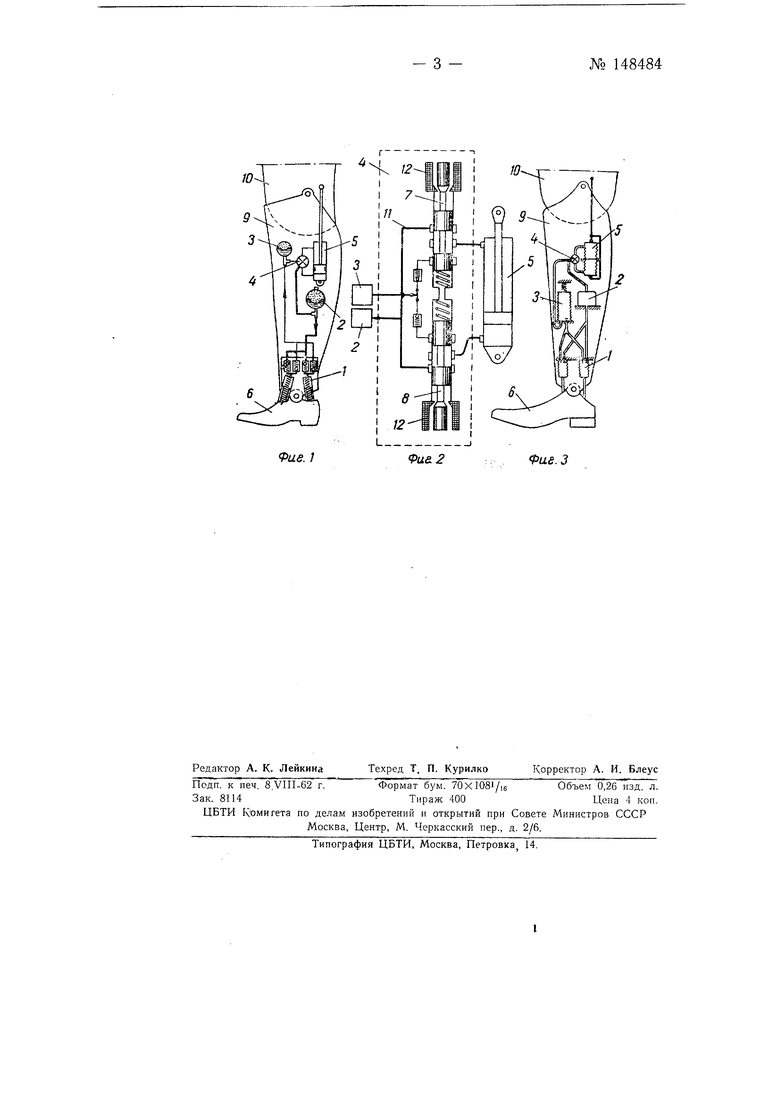
На фиг. 1 изображена принципиальная схема гидравлической системы протеза; на фиг. 2 - схема распределительиого устройства; иа фиг. 3-вариант гидравлической системы с применением сильфонов.
Гидравлическая сис-1ема (фиг. 1) состоит из насоса /, гидробачкз 2, гидроаккумулятора 3, распределительного устройства 4 и силового цилиндра 5.
Протеч работает следующим образом.
При перекате стопы 6 протеза во время ходьбы насос / перекачивает рабочую жидкость из гидробачка 2 в гидроаккумулятор 3. Из гидроаккумулятора жидкость через распределительное устройство 4 nocr.v;тает под давлением в рабочие полости силового гидроцилипдра 5.
Распределительное устройство 4 (фиг. 2) содерл-сит два независимые золотника 7 и 5, благодаря чему осуществляется сгибание и разгибание голени 5 относительно бедра 10.
Возможны с.гедующие четыре положения золотников 7 и 5:
а) верхний золотник 7 перемещен вниз, в результате чего перекрыт канал 11 к сливу в гидробачок 2 и жидкость перепускается и гидроаккумулятора 3 в верхнюю полость гидроцилиндра 5 - осуществ ляется сгибание голени 9 относительно бедра 10;
№ 148484- 2 б) золотник 8 перемещен вверх, в результате чего перекрыт канал и к сливу в гидробачок 2 и жидкость перепускается из гидроаккумулятора 3 в нижнюю полость гидроцилиндра 5-осуществляется разгибание голени .9 относительно бедра W;
Б) оба золотника 7 и 5 перекрывают слив - достигается фиксация колена, так как перетоку жидкости из полостей гидроцилиндра 5 в гидроаккумулятор 3 препятствуют обратные клапаны;
г) когда золотники 7 и 5 в исходной позиции, обе полости соединены со сливом - допускается свободное качание голени относительно бедра.
Золотники 7 и 8 управляются с помощью электромагнитов 12, уровень возбуждения которых определяется сигналами биотоков, поступающими из узла управления. Для произвольного управления указанными режимами работы коленного механизма используются биотоки усеченных мышц:-сгибателей голени и разгибателей голени.
Благодаря тому, что развиваемое электромагнитом усилие и величина перемещения золотника пропорциональны силе тока, подаваемого на катушку электромагнита, может быть достигнуто плавное регулирование угловой скорости голени 9 относительно бедра W соответственно мощности отводимых от мышц биоэлектрических сигналов.
Для по.ддержания соответствующих давлений (в определенных пределах) в гидроаккумуляторе 5 и в гидробачке 2 применяется сжатый воздух, отделенный резиновой мембраной от полости, заполненной рабочей жидкостью.
В целях обеспечения полной герметичности гидравлической системы цилиндры с порщнями могут быть заменены тонкостенными цилиндрическими камерами с волнообразными складками-гофрами (сильфонами), как это изображено на фиг. 3.
Предмет изобретения
Протез бедра с гидравлической системой, содержащий насос, гидробачок, гидроаккумулятор, отличающийся тем, что, с целью произвольного и плавного управления движениями коленного механизма, в нем применено распределительное устройство из двух независимы.: клапанов, управляемых биотоками мышц.
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез предплечья с электрическим сервоприводом, управляемый биотоками мышц, с устройством для ощущения силы схвата | 1958 |
|
SU120300A1 |
| Сервопривод, управляемый биотоками мышц | 1958 |
|
SU118581A2 |