Известны приборы для однопрофильного контроля кинематических илрешностей зацепления зубчатой оары, кинематическая цепь которых замыкается исследуемой парой «и имеет подвижный элемент, воздейст вующий на электромеханический датчик.
В предлагаемом .приборе, с целью выявления технологических причин погрепшостей и характера их проявления при работе зубчатой пары путем проведения гармонического анализа кинематической погрешjiocTH, применен анализатор гармонических составляющих спектра сигнала датчика ло лТ.искретному ряду частот.
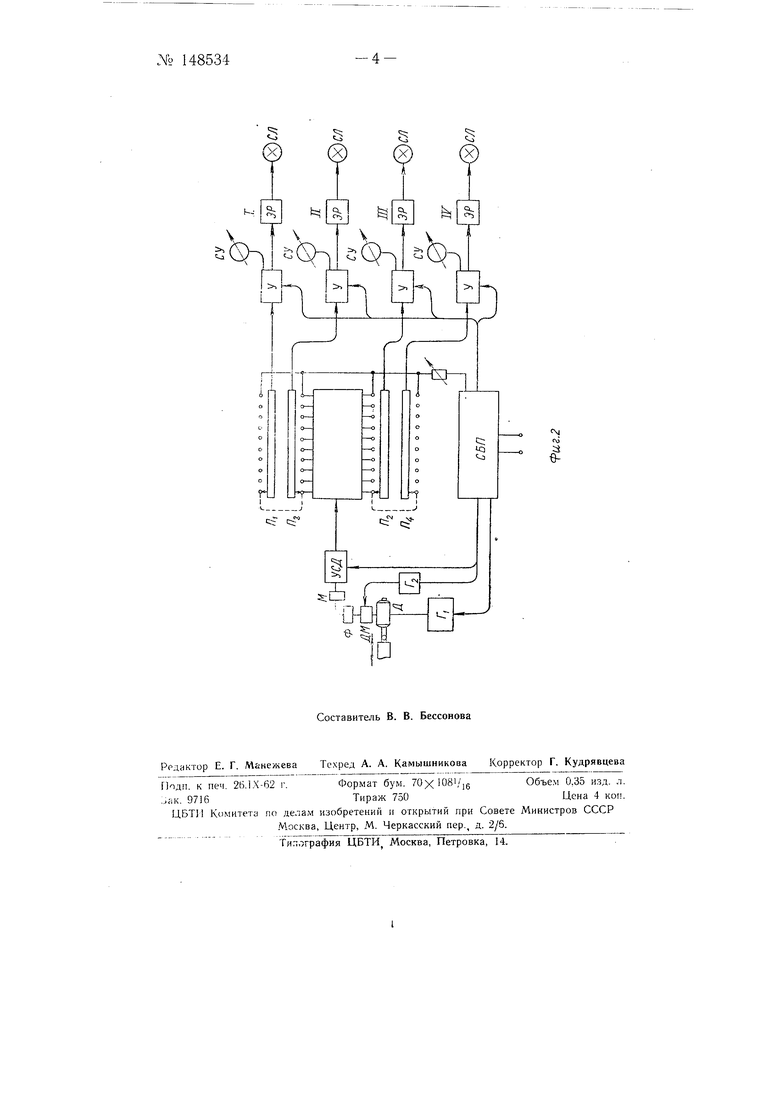
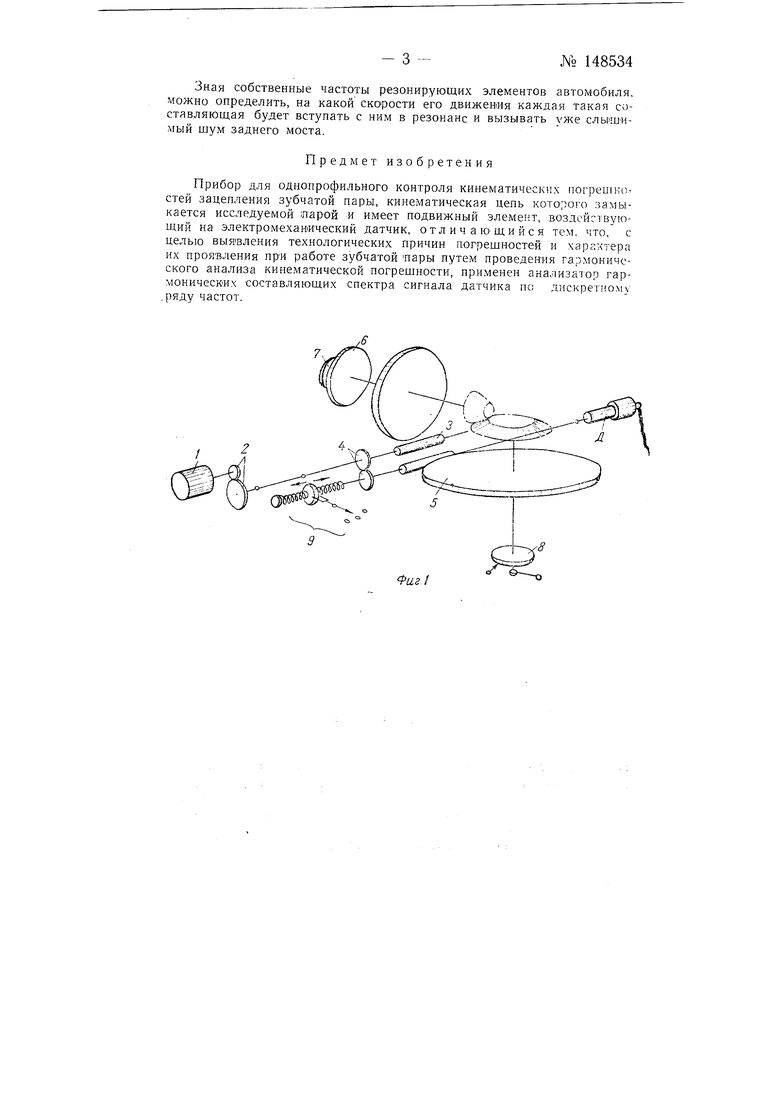
На фиг. 1 изображена кинематическая схема прибора; на фиг. 2 - блок-схема электрической части прибора.
Привод Прибора осуществляется от электродвигателя 1 трехфазного тока через встроенную в электродвигатель понизительную зубчатую передачу 2.
Прибор содержит червячную пару 3 горизонтального шпинделя, цилиндрическую пару 4, червячную пару 5 вертикального шпинделя, индуктивный датчик Д, лимб 6 для измерения осевого перемещения горизонтального пшинделя. маховик 7, лимб 8 для осевого перемещения вертикального шпинделя, устройство 9 для силового замыкания кинематической цепи прибора, генератор Гь демодулятор ДМ, полосовой фильтр Ф, модулятор М, камертонный генератор Г. ааериодический усилитель УСД, стабилизированный блок питания СБП, переключатели Я, П2, Яз, П,
Датч1Ик Д представляет собой стандартный преобразователь индуктивного, типа, например марки БВ-785к, выпускаемый заводом «Калибр.
№ 148534-2От генератора PI датчик питается несущей частотой в 100 t/{ путем удвоения частоты электрической сети 50 ги,. На выходе датчика получается сигнал несущей частоты, модулированный частотами аогрещностей зацепления исследуемой лары зубчатых колес.
После демодуляции в фазочувствительном демодуляторе ДЛ электрический сигнал, отображающий погрещности зацепления, подается на полосовой фильтр Ф, который срезает низкочастотные составляющие ощибки зацепления, лежащие ниже 2 ги, и высокочастотные - выще 1,5 гц.
Обработанный сигнал поступает на электромеханический модулятор М, в который ВВОДИТСЯ несущая частота в 43,5 ги, от высокостабильного камертонного генератора Г. На выходе модулятора М образуется сигнал С частотным спектром. Через апериодический усилитель УСД сипкал поступает на блок фильтров, в котором происходит анализ спектра сигнала по дискретному ряду гармонических составляющих с интервалом в 0,5 гц.
Чтобы измерить амплитуды отдельных составляющих спектра ошибки, в приборе имеются четыре идентичных измерительных канала, каждый из которых с помощью переключателей Яь П, Яз и П может подключаться на выход одного из двадцати фильтров анализатора.
Для уменьи1ения числа необходимых коммутационных соединений каналы / и // могут быть подключены к любым нечетным фильтрам, а каналы /// и IV - к любым четным (согласно нумерации, сделанной на приборе).
Каждый усилительный канал устройства состоит из усилителей У, стрелочного вольтметра детекторной системы СУ и электронного реле ЭР, которое Включает сигнальную лампочку СЛ при превышении ранее заданного фовня определенной частотной составляЕощей norpeuiности.
Определенный предел срабатывания реле в каждом из четырех измерительных каналов может быть установлен с помощью специальных регуляторов.
Для проверки работы каналов и регулировки предела срабатывания реле в крайних правых .положениях переключателей Я, П, Яз и Я,) на измерительные каналы подается переменное напряжение от блока питания СБП, величина которого может регулироваться потенциометром.
Усилители всех четырех измерительных каналов и усилитель УСД сигналов датчика снабжены ступенчатыми аттешоаторами для регулировки чувствительности измерительных каналов и анализатора в целом.
Питание всех электронных узлов и прибора осуществляется от сети однофазного переменного тока 220 в с частотой 50 гц. через стабилизированный блок питания СБП.
При работе устройства проверяются величина и частотная характеристика отдельных гармонических составляющих кинематической ошибки. Каждая такая составляющая повторяется вполне определенное количество раз на один оборот щестерни и соответственно вполне определенное кол ичество раз в момент пересопряжения пары зубьев одного зуба колеса и одного - шестерни.
Как уже было выше указано, кинематическая ошибка пары ujecTeрен при ПОМОИ.Ш прибора разлагается в ряд гарлтонических составляю-щих в диапазоне от 2 до 11,5 гц. через каждые 0,5 гц (20 составляющих) .
Зная собственные частоты резонирующих элементов автомобиля, можно определить, на какой скорости его движения каждая такая составляющая будет вступать с ним в резонанс и вызывать уже сльрШИмый шум заднего моста.
Предмет изобретения
Прибор для однопрофильного контроля кинематических погрешностей зацепления зубчатой пары, кинематическая цепь которого замыкается исследуемой 1парой и имеет подвижный элемент, воздействующий на электромеханический датчик, отличающийся тем. что, с целью выявления технологических причин погрешностей и характера их проявления при работе зубчатой пары путел- проведения гармонического анализа кинематической погрешности, применен анализатор гармонических составляющих спектра сигнала датчика пс дискретному .ряду частот.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ТЕМПЕРАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2206878C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ОПТИКО-ЭЛЕКТРОННЫХ СЛЕДЯЩИХ СИСТЕМ | 1995 |
|
RU2093850C1 |
| СПОСОБ ПЕРЕДАЧИ СООБЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2097924C1 |
| Вибрационный уровнемер жидкости | 1980 |
|
SU920390A1 |
| ОПТИКОЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 1996 |
|
RU2101724C1 |
| Способ определения кинематической погрешности зубчатых колес | 1976 |
|
SU739328A1 |
| Устройство для обнаружения дефектов в кинематических парах машин | 1976 |
|
SU600437A1 |
| СТАНОК ДЛЯ ЭЛЕКТРОХИМИЧЕСКОЙ РАЗМЕРНОЙ ОБРАБОТКИ ЗУБЧАТЫХ КОЛЕС | 1972 |
|
SU428901A1 |
| Анализатор частотных характеристик линейных и нелинейных систем автоматического регулирования | 1959 |
|
SU133111A1 |
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |