Предлагаемое судно предназначается для производства на больших глубинах (до 4000 м по предположению автора) работ, связанных, главным образом, с розыском и подъемом потонувших судов, а также для исследований морского дна и научных изысканий. Снабженный двойной обшивкой корпус судна образует водолазный колокол, разделенный переборками на отдельные камеры, давление в которых поддерживается равным забортному. Обслуживающая команда (в количестве примерно около 60 чел.) находится в установленных в нижней части колокола толстостенных цилиндрических камерах, откуда и производится при помощи соответствующих приборов управление передвижением и работой судна под водой. Для производства работ судно снабжено землесосом, землечерпательницей, элеватором и др. подобными механизмами, размещенными в средней открытой снизу и в соседних с ней камерах. С целью наблюдения за наружным водным пространством в стенках рабочих цилиндрических камер сделаны особого устройства глазки с помещенными над и под ними ртутными лампами. Для питания воздухом погруженного под воду судна предназначается связанный с последним шлангом поплавок, поднимаемый на поверхность воды и снабженный воздушным насосом. Для погружения судна в воду и подъема его имеются воздушные затопляемые камеры, вертикальные гребные винты и рули глубины, горизонтальное же передвижение осуществляется обыкновенными горизонтальными винтами, а изменение направления - с помощью руля. На случай аварии судно снабжено в качестве спасательного аппарата цилиндрическим воздушным шлюзом, к которому сверху прикреплена гибкая образующая замкнутую полость оболочка, наполняемая воздухом и всплывающая при этом вместе с цилиндром на поверхность воды.
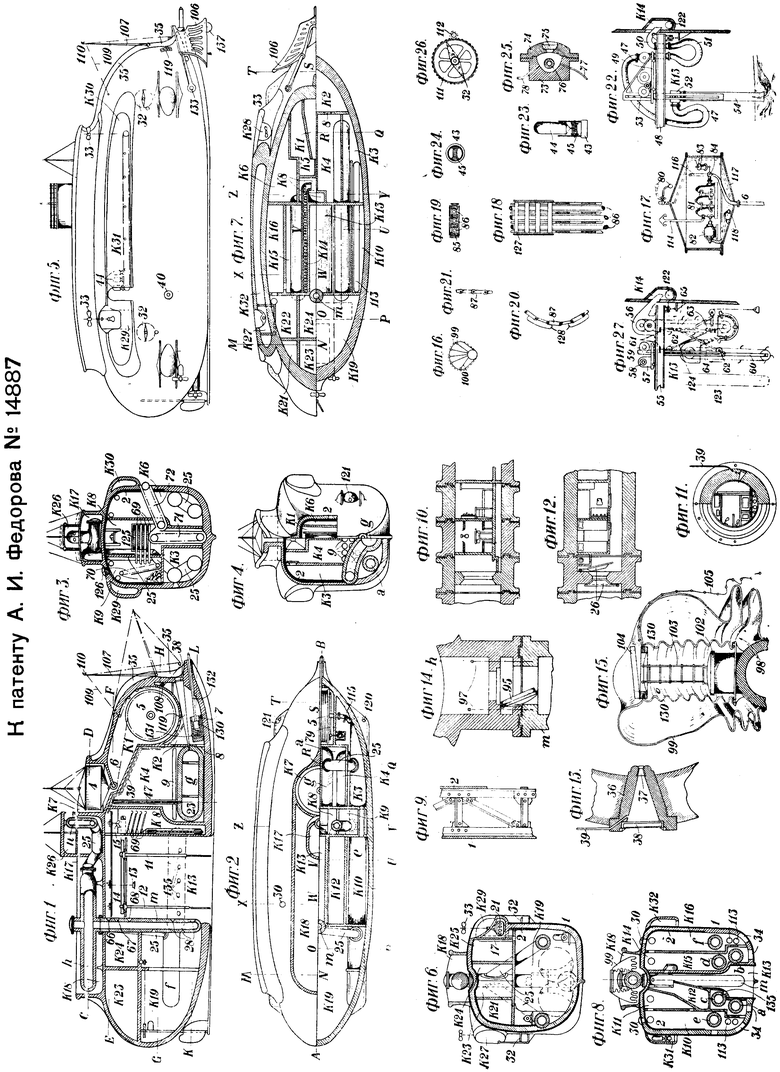
На чертеже фиг. 1 изображает продольный разрез предлагаемого судна по АВ фиг. 2; фиг. 2 - разрез его по CD и GH фиг. 1; фиг. 3 - поперечный разрез по YZ фиг. 2 и 7: фиг. 4 - поперечный разрез по QRST фиг. 2 и 7; фиг. 5 - общий вид судна сбоку; фиг. 6 - поперечный разрез по MNOP фиг. 2 и 7; фиг. 7 - разрез по EF и KL фиг. 1; фиг. 8 - поперечный разрез по UVWX фиг. 2 и 7; фиг. 9 - часть шпангоута с двойной обшивкой; фиг. 10-12 - устройство рабочих цилиндрических камер в трех разрезах; фиг. 13 - устройство глазка для наблюдений в продольном разрезе; фиг. 14 - входной люк спасательного воздушною шлюза; фиг. 15 и 16 - прикрепленную сверху последнего гибкую оболочку: фиг. 17 - разрез поплавка; фиг. 18-21 - устройство подающего воздух шланга; фиг. 22 - общий вид землесоса; фиг. 23 и 24 - устройство буйка; фиг. 25 - поперечный разрез фонаря для ртутной лампы; фиг. 26 - руль глубины с зубчатой передачей и фиг. 27 - общий вид землечерпалки.
Корпус судна (фиг. 1-7), образующий разделенный переборками на отдельные камеры водолазный колокол, состоит из склепанных из углового железа шпангоутов (фиг. 9), обшитых снаружи котельным железом 1, а внутри в верхней части до половины - стальными листами 2. Последнее сделано на случай прорыва верхней обшивки 1 для того, чтобы воздух, оставшийся под колпаком стальной оболочки 2, мог поднять судно на поверхность воды. Камеры к20-к25 (к20 на чертеже не показана, но соответствует камере к21 и граничит с камерами к23 и к25) образуют кормовую группу воздушных затопляемых камер, камеры к8-к17 и к26 - среднюю группу и камеры к3-к6 - носовую. Эти же воздушные камеры в продольном направлении также разбиваются на три группы: боковую, состоящую из камер к3, к10, к20 и к25, среднюю, в которую входят камеры к4, к5, к8, к9, к11, к15, к17, к23, к24 и к26, и другую боковую - к6, к16, к21 и к22. Для затопления воздушных камер при погружении судна под воду служат отверстия 30 (фиг. 8), а вытеснение воды при подъеме осуществляется через отверстия 34 в дне при помощи сжатого воздуха, запасаемого в баллонах 113 (фиг. 7 и 8). Уничтожение крена достигается соответственным перекачиванием воздуха из одной группы камер в другую. Чтобы при опускании на значительную глубину судно не было раздавлено, в виду небольшой толщины обшивки, а также чтобы открытая воздушная камера 13 с рабочими механизмами не затоплялась, давление внутри судна поддерживается равным наружному.
Для помещения команды установлены, главным образом, в нижней части судна, стальные толстостенные цилиндрические камеры а, b, с, d, е, f, g (фиг. 1, 2 и 8), которые составляются из отдельных колен и должны быть достаточно прочны, чтобы выдержать внешнее давление примерно до 400 атм. Внутри цилиндрические камеры -обшиты досками по войлоку и разбиты на ряд кают (фиг. 10-12), а также снабжены через каждые 5-10 м двойными герметически закрывающимися дверьми 26, что позволяет немедленно изолировать поврежденный участок от остальных помещений. Цилиндрические камеры а и b (фиг. 8), помещающиеся на самом дне судна, имеют наружный диаметр, предположительно, около 4 м и предназначены исключительно для аккумуляторов. Следующие цилиндрические камеры с и d меньшей длины служат для наблюдения через глазки 135 (фиг. 1 и 8) за работой в камере к13. Цилиндрические камеры е и f предназначены для жилья команды, для наблюдений и для склада провианта. В цилиндрической камере g (фиг. 1) располагается электрическая станция и буровое отделение 23. В ней же помещается телефонный коммутатор, радиостанция, приборы, управляющие движением судна, указывающие его положение, глубину и т.д. Наверху посередине судна, в камерах к17 и к26 установлен небольшой вертикальный цилиндр n (фиг. 1), играющий роль закрытого капитанского мостика во время переходов под водой. Водонепроницаемыми коридорами 25 (фиг. 1-3 и 6) все цилиндры сообщаются друг с другом и с вертикальной трубой m (фиг. 1 и 8), которая вверху заканчивается цилиндрическим воздушным шлюзом h, служащим спасательным аппаратом на случай аварии и установленным в открытой сверху камере к18, подобной камерам к1, к7, к3 также открытым и всегда заполненным водой. В камере к1 помещается катушка 5 (фиг. 1 и 2) с намотанным на нее шлангом 6. Один конец последнего вводится в поплавок 4 (фиг. 1 и 17), для которого предназначена камера к7, а другой заканчивается внутри судна краном 115 (фиг. 2), позволяющим производить подачу воздуха или в цилиндре е, или в камеру к2. Боковые, устраненные в виде выступов вдоль всего судна камеры к31 и к32 (фиг. 5, 7 и 8), вмещают транспортеры 42, снабженные буйками 44 (фиг. 5, 23 и 24.
Кроме вышеперечисленных камер в предлагаемом судне предусмотрены еще воздушные незаливаемые камеры к2, к19, к27, к30 (фиг. 1, 2, 6 и 7), при чем последние четыре от других частей судна изолированы совершенно и в них установлены электромоторы 21 (фиг. 6.), приводящие в действие вертикальные гребные винты 33 (фиг. 5-7). В камере к19, соединенной проходами через трубу 17 (фиг. 6) с камерой к10, помещается машинное отделение, а в камере к2, сообщающейся проходами 8 (фиг. 1 и 7) с камерами к4 и к5, установлены мотор 79 (фиг. 2) для вращения катушки 5 со шлангом 6 и цилиндр 7 (фиг. 1) пружинного буфера - антитарана 132. Действие последнего, смягчающее удары при столкновениях, заключается в том, что, при движении штанги 132 назад, поршень 130 вытесняет воду из цилиндра 7 через малое отверстие 131. В первоначальное положение штанга 132 приводится пружиной, помещенной между дном цилиндра 7 и поршнем 130.
Все механизмы для производства подводных работ размещаются в воздушных камерах к8, к9, к12, к13 и к14 (фиг. 1, 3 и 8), при чем открытая снизу камера к13 сообщается с камерами к15, к12, и к8, а последняя, в свою очередь, сообщается с камерой к9. Вверху камеры к13 расположен мостовой кран с тремя тележками, из которых одна снабжена электромагнитом 13 для подъема со дна моря железных и стальных предметов, складываемых затем в камеру к12 (фиг. 8), а две другие - ковшами 14 и 15 для подъема мелких вещей, которые затем сбрасываются или в ту же камеру к12, или в камеру к8 на сита 125 (фиг. 3). Последние устроены в четыре яруса, начиная с крупкой клетки и кончая клеткой, размер которой не дает проникнуть мелкой монете. Оставшиеся на ситах 125 предметы по шнекам 69 направляются в камеру к9, если они представляют какую-либо ценность, в противном же случае откидное дно жолоба шнека открывается и содержимое проваливается вниз камеры к8, откуда элеватором 71 передается на транспортер 72 и выбрасывается последним за борт. Поданные шнеками 69 в камеру к9 предметы складываются элеватором 70 в кучу, а во возвращении судна извлекаются через люк 126. Кроме указанного выше мостового крана камера к13 (фиг. 1) снабжена еще землесосом 12 и ковшевой землечерпалкой 11. Землесос 12 (фиг. 1) установлен на тележке 49 (фиг. 22) мостового крана 48, в конце которого у камеры к14 укреплен неподвижно хобот 50, соединенный гибким рукавом 51 с всасывающим аппаратом. С другой стороны к последнему присоединена при помощи гибкого рукава 47 всасывающая труба 54, головка 52 которой передвигается по вертикали в параллелях при помощи лебедки 53. Засасываемый через трубу 54 баласт поступает по рукавам 47 и 51 и по хоботу 50 в камеру к14 на шнек 122, которым передается в камеру к8, описанную выше. Землечерпалка 11 (фиг. 1) передвигается по камере к13 с помощью мостового крана 55 (фиг. 27), на тележке 57 которого установлен мотор 58 и лебедка 59 для поднимания и опускания рамы 60 с ковшами. Захватываемый последними баласт поступает по чешуйчатому раздвижному жолобу 64 на ковшевой элеватор 65, которым передается через неподвижно укрепленный на крапе хобот 50 в камеру к14 на шнек 122 и далее в камеру к8. Передвижение по горизонтали (напр., в положение 123) рамы 60 с ковшами осуществляется шарнирными тягами 124, головки которых 62, 63 перемещаются винтами 61.
Когда является необходимость отметить положение какого-либо находящегося под водой предмета, например, затонувшего судна, применяются буйки 44 (фиг. 23), снабженные свинцовым грузом 43 (фиг. 23 и 24), с которым буек 44 связан тросом, намотанным на вьюшку 45. Буйки 44 помещаются в камерах к31 и к32 (фиг. 5) на ленте транспортера 42, приводимого в движение от электромотора при посредстве барабана 41. Управление установкой буйков 44 путем включения в соответствующий момент мотора, производится лицом, наблюдающим за наружным водяным пространством через глазок 40.
Для того, чтобы, находясь в рабочих камерах, можно было наблюдать за работой в камере к13 и в машинном отделении к19, камеры с и d снабжены глазками 135 (фиг. 1 и 8), а сообщающаяся с рабочими камерами е и f труба m - глазками 28, 66, 67 и 68. Для обозревания же пространства, лежащего впереди судна, особенно при движении последнего у дна, устроены глазок 119 в рабочей цилиндрической камере g, где установлены приборы управления, и глазки 120 и 121 в цилиндрических камерах е и f. Глазки состоят из ввинченной в стенку соответствующей рабочей камеры конической стальной трубы 36 (фиг. 13), в широкой части которой, обращенной наружу, установлено стекло 38, а узкая часть снабжена объективом 37, подобным объективу бинокля. Внутреннее пространство трубы 36 заполняется по трубке 39 воздухом из соответственной воздушной камеры, благодаря чему давление в нем равно забортному давлению и опасность продавливания стекла 38, имеющего довольно большой диаметр, устраняется, объектив же 37 должен выдерживать давление в 300-350 атм. С целью освещения пространства перед глазками, подлежащего наблюдению, под каждым таким глазком и над ним устроены ртутные лампы 76 (фиг. 25), состоящие из наполненной ртутью кварцевой трубки, концы которой включены проводами в общую осветительную сеть судна. Каждая лампа 76 помещается в вентилируемой при помощи трубок 77 и 78 полости, сделанной в стальной части 73 и прикрытой сверху крышкой 74, снабженной стеклом 75. Для более сильного освещения пространства, лежащего перед глазками 119, впереди судна, предназначен прожектор 110 (фиг. 1 и 5), установленный на поворотной мачте 107, укрепленной шарнирно и приводимой в движение с помощью троса 109 электромотором 108.
Для погружения судна в воду и всплывания его, кроме воздушных затопляемых камер, применены еще вертикальные винты 33 (фиг. 5-7) и рули глубины 32 (фиг. 5 и 6), поворачиваемые электромоторами 112 (фиг. 26) посредством шестерен 111. Перемещения судна в горизонтальной плоскости осуществляются горизонтальным винтом и рулем обычного устройства. Пока судно идет, на поверхности работают двигатели внутреннего горения, установленные в машинном отделении к19, а командир помещается в открытой камере к26 (фиг. 1 и 3). При погружении под воду переходят на работу электромоторов, получающих энергию от аккумуляторов, управление же судном производится из рабочих камер n и g.
С целью предохранения от повреждений при ударах о те или иные препятствия, когда буфер-антитаран окажется недостаточным, судно снабжено носовым стальным форштевнем-тараном 35 (фиг. 1 и 5), при чем в нижней части последнего укреплена при помощи шарниров 133 (фиг. 5 и 7) предохранительная решетка 106, предназначаемая для отталкивания в сторону затонувших мин, встречающихся на пути при следовании судна у дна. Для того, чтобы решетка 106 не зацеплялась за неровности дна, она снабжена роликом 137.
Для того, чтобы погруженное в воду судно могло получать воздух, не поднимаясь на поверхность, оно снабжено шлангом 6, оканчивающимся поплавком 4 (фиг. 1 и 1, 7) внутри которого помещается воздушный насос 81, приводимый в действие электромотором 82, включаемым при помощи рычага с пустотелым шаром 80, как только последний окажется над поверхностью воды и силою собственной тяжести повернет рычаг вниз. Чтобы при обратном погружении в воду, после окончания работы на поверхности, поплавок 4 не был раздавлен в нижних слоях воды, он снабжен следующим устройством: открытая с одного конца труба 116 соединяется другим концом с трубой 6, при помощи автоматического клапана 84, управляемого электромагнитом 83. Как только вода, вгоняемая в поплавок 4 внешним давлением через отверстие 117, дойдет до рычага с полым шаром 118, последний поднимется, рычаг замкнет катушку электромагнита 83, который откроет клапан 84, и в поплавок 4 через трубы 116 и 6 станет поступать воздух из судна, благодаря чему внешнее давление будет уравновешено. Во время работы насоса 81, когда поплавок находится на поверхности, воздух засасывается через трубу 114 и по шлангу 6 поступает или в камеру к2, или, при переключении крана 115 (фиг. 2), в рабочую камеру е. Шланг 6 состоит из трех гибких обмотанных стальной спиралью трубок 86 (фиг. 18 и 19), заключенных между алюминиевыми вкладышами 85, свинченными планками 127. По бокам трубок 86 проходят шарнирные цепи 87 (фиг. 21). Одна из крайних трубок предназначена для электрического кабеля, идущего к мотору 82 в поплавке 4, средняя - для подачи воздуха и другая крайняя для мелких проводов: телефонных, звонковых и др. Через каждые 5-10 м вдоль всего шланга помещены плотные двойные брезентовые прорезиненные мешки 128 (фиг. 20), которые соединены со средней воздушной трубой 86. Когда шланг 6 разматывается, они наполняются воздухом и, поддерживая шланг, уменьшают опасность его обрыва от собственного веса. Для тех случаев, когда поплавок 4 не может быть поднят на поверхность по тем или иным причинам, предусмотрены баллоны 9 (фиг. 1 и 4), в которых хранится запас кислорода для команды, рабочий же воздух берется из баллонов 113 (фиг. 8).
В случае аварии судна воздушный шлюз h с находящейся в нем командой может быть отделен от трубы m, к которой он прикреплен винтами 97 (фиг. 14). Для входа и выхода воздушный шлюз снабжен герметически закрывающимися люками 95 (фиг. 14) - снизу и 102 (фиг. 15) - сверху. Снаружи к нему прикреплена образующая внутри замкнутую полость гибкая оболочка 99 (фиг. 15), которая, будучи наполнена по трубке 98 воздухом, удерживает спасательный аппарат на поверхности. Благодаря тросам 100 гибкая оболочка 99 при наполнении ее воздухом принимает форму, изображенную на фиг. 16. Когда команда может покинуть спасательный аппарат, люк 102 (фиг. 15) открывается, клапаны 130 закрываются, чтобы не выпустить воздух из оболочки, и затем открывается крышка 104. Переход на берег или в стоящее рядом судно совершается по внутреннему трапу 103 и наружному 105.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехфазная полюсопереключаемая обмотка | 1990 |
|
SU1791919A1 |
| Трехфазная полюсопереключаемая обмотка | 1986 |
|
SU1385196A1 |
| Трехфазная полюсопереключаемая обмотка | 1989 |
|
SU1628150A1 |
| Трехфазная одно-двухслойная полюсопереключаемая обмотка | 1986 |
|
SU1411887A1 |
| Автоматическая окрасочная линия | 1983 |
|
SU1207510A1 |
| Трехфазная полюсопереключаемая обмотка | 1986 |
|
SU1410205A1 |
| СПОСОБ ТЕПЛОХЛАДОСНАБЖЕНИЯ С ПРИМЕНЕНИЕМ АБСОРБЦИОННОГО ТЕРМОТРАНСФОРМАТОРА С ДВУХСТУПЕНЧАТОЙ АБСОРБЦИЕЙ | 2020 |
|
RU2755501C1 |
| ИЗМЕРИТЕЛЬ СОДЕРЖАНИЯ ДИСПЕРСНОЙ ФАЗЫ В ГАЗОВОМ ПОТОКЕ | 2016 |
|
RU2644449C1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ ДИАГНОСТИКИ РАКА ПОДЖЕЛУДОЧНОЙ ЖЕЛЕЗЫ И ХРОНИЧЕСКОГО ПАНКРЕАТИТА | 2018 |
|
RU2714595C1 |
| УСТРОЙСТВО И СПОСОБ ПОЛУЧЕНИЯ ИНЕРТНОЙ ГАЗОВОЙ СМЕСИ НА ОСНОВЕ АЗОТА | 2003 |
|
RU2229070C1 |
1. Судно для подводных разведочных работ, характеризующееся применением корпуса (фиг. 5), состоящего из укрепленных между наружной обшивкой 1 и внутренней неполной обшивкой 2 (фиг. 9) шпангоутов и образующего разделенный переборками на воздушные камеры к1-к32 (фиг. 1-4 и 6-8) водолазный колокол, в нижней части которого размещены рабочие цилиндрические камеры а, b, с, d, e, f, g (фиг. 1, 8, 10-12), проходящие через переборки воздушных камер и соединяющиеся друг с другом посредством водонепроницаемых коридоров 25, из каковых воздушных камер камера к13 открыта снизу и сообщается с прочими заливаемыми воздушными камерами, образующими три продольных группы: боковую, состоящую из камер к20, к25, к10 и к3, среднюю, составленную из камер к11, к12, к13, к14, к15, к8, к9, к17, к26, к4 и к5 и вторую боковую, в состав которой входят камеры к21, к22, к16 и к6 и составляющими, в свою очередь, три поперечных группы: кормовую группу - из камер к21, к20, к22, к23, к24 и к25, среднюю - из камер к8-к17 и к26 и носовую - из камер к3-к6, благодаря чему воздух из каждой группы может быть перекачан, с целью выравнивания судна, в соседнюю поперечную группу или же в одну из групп одного и того же продольного ряда, при чем для погружения судна под воду открываются клапаны 30, а подъем судна осуществляется при помощи вытеснения через отверстия 34 в дне воды из заливаемых камер сжатым воздухом, поступающим в них из баллонов 113 (фиг. 8).
2. Форма выполнения охарактеризованного в п. 1 судна, отличающаяся применением открытых, всегда заполненных водой камер к1, к7, к18, к31 и к32, из каковых камер камера к1 служит помещением для катушки 5 (фиг. 1 и 2), на которую намотан шланг, имеющий на конце поплавок 4, расположенный в открытой камере к7, открытая сверху камера к18 предназначена вмещать цилиндрический воздушный шлюз h, соединенный с рабочими камерами и служащий спасательным аппаратом на случай аварии судна, и камеры к31 и к32 (фиг. 3, 5, 8), устроенные в виде выступов вдоль всего судна, вмещают транспортеры 42, служащие для сбрасывания сигнальных буйков (фиг. 5, 23 и 24).
3. Форма выполнения охарактеризованного в п. 1 судна, отличающаяся применением незаливаемых воздушных камер к2 и к19, из коих камера к2 сообщается проходами 8 с камерами к4 и к5 и служит помещением для цилиндра 7 пружинного буфера-антитарана 132 (фиг. 1 и 7), а камера к19 соединена с камерой к10 свободным проходом через трубу 17 и служит машинным отделением.
4. Форма выполнения охарактеризованного в п. 1 судна, отличающаяся применением водонепроницаемых изолированных камер к27, к28, 29 и к30, служащих помещением для электромоторов, приводящих в действие вертикальные гребные винты 33 (фиг. 6).
5. Форма выполнения охарактеризованного в п. 1 судна, отличающаяся применением: а) в рабочих камерах с и d (фиг. 1 и 8) глазков 135 для наблюдения за работой в камере к13, б) в трубе m - глазков 28, 66, 67 и 68 и в) в рабочей камере g, служащей электрической станцией, - глазка 119.
6. Видоизменение охарактеризованного в п.п. 1 и 2 судна, отличающееся применением в воздушном шлюзе h: а) люков 95 (фиг. 14) и 102 (фиг. 15), б) гибкой оболочки 99 с лестницей 103, люком 104 и трапом 105, в которую воздух нагнетается по трубке 98 и в) внутренней гибкой оболочки с люками 130.
7. В охарактеризованном в п.п. 1 и 5 судне применение глазков, состоящих из конической трубы 36 со стеклом 38 и объективом 37, пространство между которыми наполняется воздухом из заливаемой воздушной камеры по трубке 39 (фиг. 13).
8. В охарактеризованном в п.п. 1 и 7 судне, применение над глазками и под ними ртутных ламп 76, помещающихся в полостях между стальной частью 73 и крышкой 74, снабженной стеклами 75, каковая полость вентилируется при помощи трубок 77 и 78 (фиг. 25).
9. В охарактеризованном в п. 1 судне применение в рабочих камерах а, b, с, d, е, f герметически закрывающихся дверей 26 (фиг. 12).
10. В охарактеризованном в п. 1 судне применение баллонов 9 (фиг. 1 и 4) с запасом кислорода для команды.
11. В охарактеризованном в п.п. 1 и 5 судне применение поворотной мачты 107 с прожектором 110, приводимой в движение мотором 108 при помощи троса 109 (фиг. 1 и 5).
12. В охарактеризованном в п. 1 судне применение рулей глубины 32 (фиг. 5), поворачиваемых мотором 112 посредством шестерни 111 (фиг. 26).
13. В охарактеризованном в п. 1 судне применение обыкновенных горизонтальных винтов и руля направления, а также четырех вертикальных винтов 33 (фиг. 5).
14. Применение в охарактеризованном в п. 1 судне поплавка 4 (фиг. 1 и 17), служащего для подъема шланга 6 на поверхность воды, с целью накачивания воздуха в судно, и снабженного воздушным насосом 81, приводимым в действие электромотором 82, включаемыми при помощи рычага с пустотелым шариком 80, замыкающего контакты по всплытии поплавка на поверхность воды, при чем воздух в полость поплавка поступает во время работы насоса по трубке 114, по погружении же поплавка в воду, - из шланга по трубке 116, снабженной автоматическим клапаном 84, открываемым при помощи электромагнита 83, замыкаемого при появлении в поплавке воды, поднимающей рычаг с пустотелым шаром 118.
15. В охарактеризованном в п.п. 1 и 14 судне применение транспортера 42 (фиг. 5), несущего буйки 44 с вьюшкой 45 и свинцовыми грузами 43 (фиг. 19 и 20) и приводимого в действие от барабана 41, вращаемого мотором, который включается лицом, наблюдающим за наружным водным пространством через глазок 40 (фиг. 5).
16. В охарактеризованном в п.п. 1 и 14 судне применение землесоса 12 (фиг. 1) обычного типа, установленного в камере к13 и получающего горизонтальное перемещение при помощи тележки 49 мостового крапа 48 (фиг. 22) и вертикальное - при помощи лебедки, передвигающей в параллелях головку 52 всасывающей трубы 54, забираемый из какового землесоса баласт поступает по гибким рукавам 51 и по неподвижно прикрепленному к крану хоботу 50 в камеру к14 на шнек 122, передающий баласт далее в камеру к8.
17. В охарактеризованном в п. 1 судне применение ковшевой землечерпалки 11 (фиг. 1), передвигающейся в камере к13 при помощи мостового крана 55 (фиг. 27) с тележкой 57, на которой установлены мотор 58 и лебедка 59 для подъема и опускания землечерпалки, из каковой землечерпалки баласт поступает по раздвижному чешуйчатому жолобу 64 на ковшевой элеватор 65, передающий баласт на шнек 122 в камеру к14 и далее в камеру к8, при чем для передвижения землечерпалки в сторону от элеватора служат шарнирные тяги, головки 62, 63 которых перемешаются винтами 61.
18. В охарактеризованном в п. 1 судне применение в камере к13 электромагнитного крана 13 (фиг. 1) для подъема со дна моря железных и стальных предметов и передачи их в камеру к12 (фиг. 8).
19. В охарактеризованном в п. 1 судне применение в камере к13 ковшей 14 и 15 (фиг. 1) для передачи поднятых со дна мелких вещей в камеру к12 пли в камеру к8 на сита 125 (фиг. 3), с которых ценные предметы шнеками 69 направляются в камеру к9, снабженную люком 126 и при помощи элеватора 70 складываются в кучу, а остальные предметы спускаются через откидное дно на дно камеры к8 и при помощи элеватора 71 и транспортера 72 выбрасываются за борт.
20. В охарактеризованном в и. 1 судне применение гибкого шланга 6, состоящего из трех гибких, обмотанных стальной спиралью, трубок 86 (фиг. 18 и 19), заключенных между алюминиевыми вкладышами 85 и планками 127 и укрепленных между двумя шарнирными цепями 87 (фиг. 21), из каковых трубок одна крайняя трубка служит для помещения электрического кабеля, идущего к мотору 82 в поплавке 4 (фиг. 17), другая крайняя трубка - для мелких проводов к сигнализационным устройствам в том же поплавке, средняя же трубка, снабженная соединенными с ней прорезиненными мешками 128 (фиг. 20), служит для подачи воздуха из поплавка 4 в судно.
21. В охарактеризованном в п. 4 судне применение предохранительной решетки 106 (фиг. 5 и 7), скрепленной с носом судна при помощи шарниров 133 и снабженной роликом 137.
22. В охарактеризованном в п. 1 судне применение носового стального форштевня-тарана 35 (фиг. 1 и 5).
