i4
со
о
О) ОС
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитометрический детектор транспорта | 1988 |
|
SU1608731A1 |
| Магнитометрический детектор транспорта | 1982 |
|
SU1037319A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАПРЯЖЕННОСТИ МАГНИТНОГО ПОЛЯ | 2000 |
|
RU2191398C2 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОКА КАТОДНОЙ ЗАЩИТЫ | 2008 |
|
RU2379673C1 |
| Магнитографический дефектоскоп | 1987 |
|
SU1469437A1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2010 |
|
RU2441250C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2481641C2 |
| Способ измерения параметров магнитного поля | 1978 |
|
SU779951A1 |
| Устройство для сканирования магнитных полей | 1989 |
|
SU1762282A1 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ЧЕРНЫЙ ЯЩИК) | 2017 |
|
RU2651935C1 |

Изобретение относится к средствам для обнаружения движущихся транспортных средств (ТС) и может быть использовано в автоматизированных системах управления дорожным движением. Целью изобретения является повышение функциональной надежности устройства за счет автоматического выбора величины и полярности тока компенсации. При включении устройства на феррозонд 1 действует только магнитное поле земли, которое необходимо скомпенсировать. Управляемый источник 4 тока изменяет ток компенсации, поступающий в феррозонд 1, до тех пор, пока напряжение на выходе детектора 3 не сравняется с опорным напряжением компаратора 23. При движении ТС над феррозондом 1 на выходе детектора 3 формируется последовательность импульсов, которая через блок 5 выделения модуля и интегратор 6 поступает на вход порогового блока 7, регистрирующего ТС. 1 з.п. ф-лы, 5 ил.
Фи.г.1
Изобретение относится к средствам для обнаружения движущихся транспортных средств (ТС) и может быть исполь- зованЪ в автоматизированных системах управления дорожным движением.
Целью изобретения является повышение функциональной надежности путем обеспечения автоматического выбора величины и полярности тока ком- пенсации.
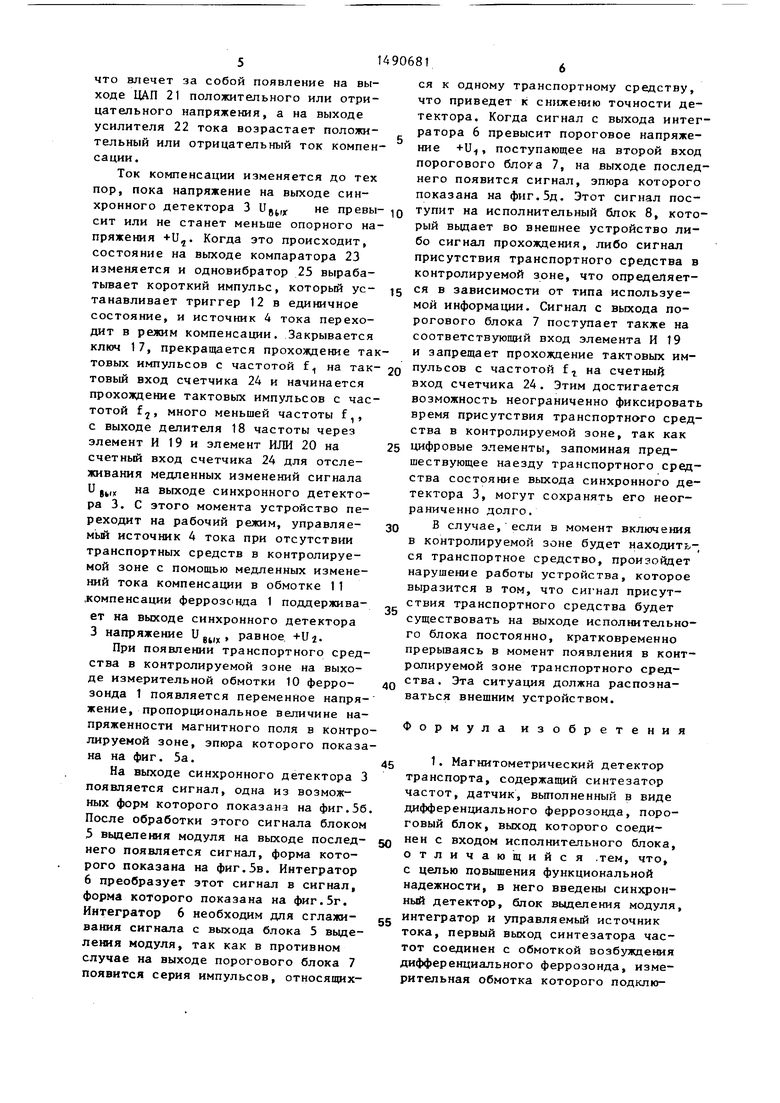
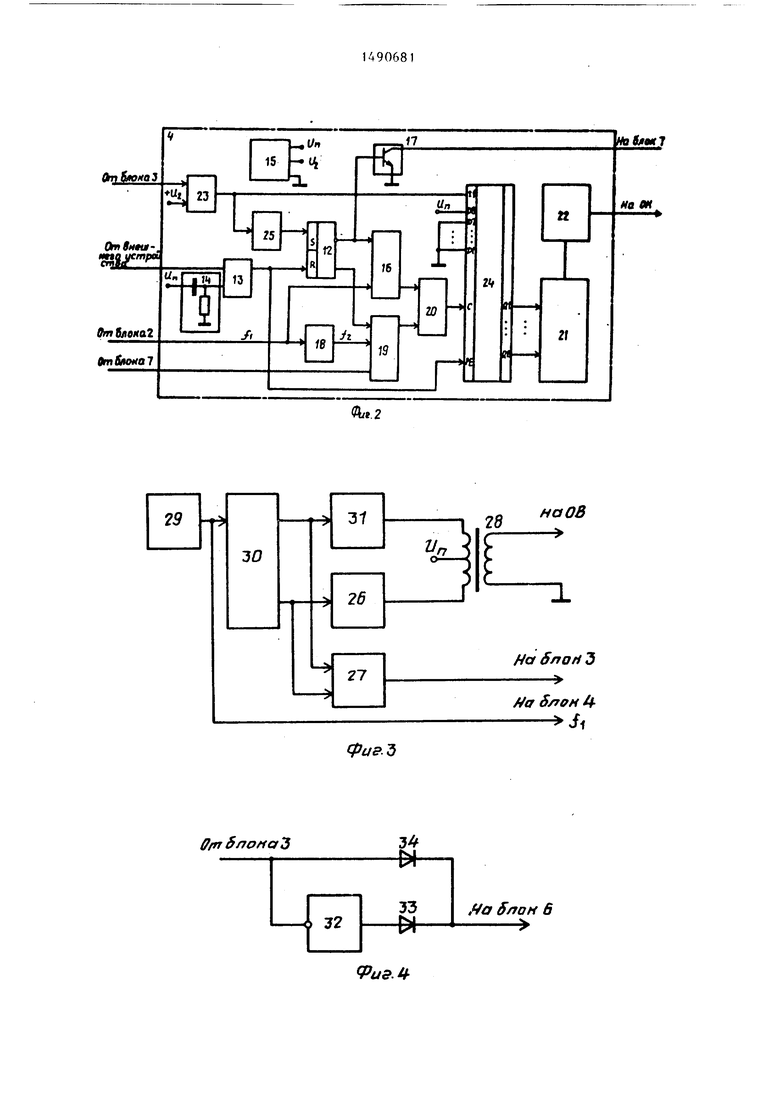
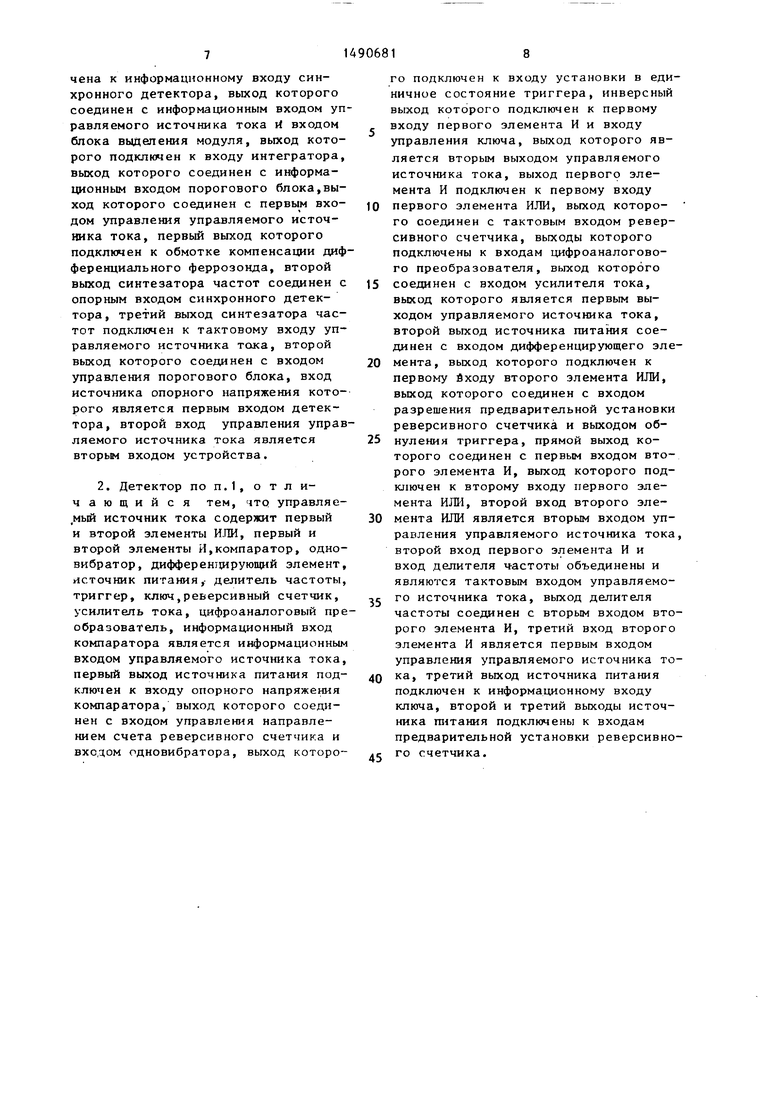
На фиг.1 приведена функциональная схема магнитометрического детектора транспорта} на фиг,2 - то же, управляемого источника тока;на фиг.З - то же, синтезатора частот;на фиг.4 - то же, блока выделения модуляj на фиг.З - временные диаграммы сигналов поясняющие работу детектора транспорта.
Магнитометрический детектор транс- порта содержит датчик 1, выполненный в виде дифференциального феррозонда, синтезатор 2 частот,синхронный детектор 3, управляемьй источник 4 тока, блок 5 выделения модуля, интегратор 6, пороговый блок 7, исполнительный блок 8, обмотки возбуждения 9, измерительную 10 и компенсации 11, триггер 12, элемент ИЛИ 13, дифференцирующий эле- мент 14, источник 15 питания, элемент И 1Ь, клюv. 17, делитель 18 частоты, элемент И 19, элемент ИЛИ 20, аналоговый преобразователь (.) 21, усилитель 22 тока, компйратор 23,ре- версивный счетчик 24 одмовибратор 23 ключ 26, элемент ИПИ 27 трансформатор 28, генератор 29, счетчик 30,ключ 31 инвертор 32 и.вентили 33 и 34.
Магнитометрический детектор транс- порта работает следующим образом.
В момент включения напряжг;ни; питания на первом ськоде синтезатора 2 частот появляются знакопеременные импульсы тока возбуждения, которые пос тупают на обмотку 9 возбуждения феррозонда 1. На выходе измерительной обмотки 10 последнего появляется переменное напряжение, пропорциональное величине напряженности ма1 иитно- го поля в контролируемой зоне. На выходе синхронного детектора 3, работа которого синхронизируется сигналом, поступающим на его второй вход с соответствующего выхода синтезатора 2 частот, появляется постоянное напряже ние, пропорциональное величине напряженности магнитного поля в контролируемой феррозондом 1 зоне. В этот же
10
5 20
5 30 j,
Q
.с
0
5
момент начинается начальная установка управляемого источника 4 тока. Триггер 12 обнуляется импульсом, сформи- рованш 1м дифференцирующим элементом 14. Этот же импульс осуществляет параллельную запись информации, находящейся на входах данных счетчика 24, в результате чего на его выходах появляется тот же код, что и на входе данных. По этому коду ЦАП 21 устанавливает на своем выходе напряжение, равное нулю, ток компенсации на выходе усилителя 22 тока компенсации также равен нулю. При этом уровень сигнала на выходе синхронного детектора 3 в ближайшее время после включения питания определяется только напряженностью магнитного поля Земли в контролируемой зоне. Этот сигнал поступает на первый вход компаратора 23, где сравнивается с опорным напряжением Up , в результате чего на выходе ком- паратора 23 появляется сигнал логической единицы или сигнал логического нуля. Этим определяется направление счета счетчика 24. Одновибратор
25 вырабатывает короткие импульсы в
I
моменты смены выходного состояния
компаратора 23, причем длительность этих импульсов устанавливается много меньшей, длительности импульса, вырабатываемого в момент включения дифферен1щрующим элементом 14, и триггер 12 удерживается в нулевом состоянии. На его инверсном выходе удерживается сигнал логической единицы, который, открывая ключ 17, запрещает работу порогового блока 7,исключая этим во время установки источника 4 проховдение сигнала с выхода синхронного детектора 3 по цепи: блок 5 вьщеленил модуля, интегратор 6, пороговый блок 7, исполнительный блок 8 и вьщачу ложного сигнала присутствия транспортного средства в контролируемой зоне. Одновременно сигнал логической единицы с инверсного выхода триггера 12 разрешает прохождение импульсов с частотой f, поступающих с третьего вьпсода синтезатора 2 частот через элемент И 16 и элемент ИЛИ 20 на тактовый вход счетчика 24,который в соответствии с уровнем сигнала на его входе направления счета,начинает суммировать или вычитать поступающие импульсы с ранее записанным в него кодом. В результате начинает изменяться выходной код счетчика 24,
что влечет за собой появление на выходе ЦАП 21 положительного или отрицательного напряжения, а на выходе усилителя 22 тока возрастает положительный или отрицательный ток компенсации.
Ток компенсации изменяется до тех
пор, пока
напряжение 3
на выходе синхронного детектора 3 V не превы- сит или не станет меньше опорного напряжения +Uj. Когда это происходит, состояние на выходе компаратора 23 изменяется и одновибратор 25 вырабатывает короткий импульс, который устанавливает триггер 12 в единичнре состояние, и источник 4 тока переходит в режим компенсации. Закрывается ключ 17, прекращается прохождение так
товых импульсов с частотой f на так- 2о пульсов с частотой f на счетный
товый вход счетчика 24 и начинается прохождение тактовых импульсов с частотой fj, много меньшей частоты f,, с выходе делителя 18 частоты через элемент И 19 и элемент ИЛИ 20 на счетньй вход счетчика 24 для отслеживания медленных изменений сигнала и g, на выходе синхронного детектора 3. С этого момента устройство переходит на рабочий режим, управляемый источник 4 тока при отсутствии транспортных средств в контролируемой зоне с помощью медленных изменений тока компенсации в обмотке 1 1 .компенсации феррозонда 1 поддерживает на выходе синхронного детектора
25
30
35
вход счетчика 24. Этим достигаетс возможность неограниченно фиксиро время присутствия транспортного с ства в контролируемой зоне, так к цифровые элементы, запоминая пред шествующее наезду транспортного с ства состояние выхода синхронного тектора 3, могут сохранять его не раниченно долго.
В случае, если в момент включе в контролируемой зоне будет наход ся транспортное средство, произой нарушение работы устройства, кото выразится в том, что сигнал прису ствия транспортного средства буде существовать на выходе исполнител го блока постоянно, кратковременн прерываясь в момент появления в к ролируемой зоне транспортного сре ства. Эта ситуация должна распозн ваться внешним устройством.
3 напряжение U
вш
равное. -i-Ui.
При появлении транспортного средства в контролируемой зоне на выходе измерительной обмотки 10 феррозонда 1 появляется переменное напряжение, пропорциональное величине напряженности магнитного поля в контролируемой зоне, эпюра которого показана на фиг. 5а.
На выходе синхронного детектора 3 появляется сигнал, одна из возможных форм которого показана на фиг.56 После обработки этого сигнала блоком
5вьщеления модуля на выходе последнего появляется сигнал, форма которого показаиа на фиг.5в. Интегратор
6преобразует этот сигнал в сигнал, форма которого показана на фиг.5г. Интегратор 6 необходим для сглаживания сигнала с выхода блока 5 вьщеления модуля, так как в противном случае на выходе порогового блока 7 появится серия импульсов, относящих
5
ся к одному транспортному средству, что приведет к снижению точности детектора. Когда сигнал с выхода интегратора 6 превысит пороговое напряжение +и, поступающее на второй вход порогового блока 7, на выходе последнего появится сигнал, эпюра которого показана на фиг.5д. Этот сигнал поступит на исполнительный блок 8, который вьщает во внешнее устройство либо сигнал прохождения, либо сигнал присутствия транспортного средства в контролируемой зоне, что определяется в зависимости от типа используемой информации. Сигнал с выхода порогового блока 7 поступает также на соответствующий вход элемента И 19 и запрещает прохождение тактовых импульсов с частотой f на счетный
вход счетчика 24. Этим достигается возможность неограниченно фиксировать время присутствия транспортного средства в контролируемой зоне, так как цифровые элементы, запоминая предшествующее наезду транспортного средства состояние выхода синхронного детектора 3, могут сохранять его неограниченно долго.
В случае, если в момент включения в контролируемой зоне будет находить-, ся транспортное средство, произойдет нарушение работы устройства, которое выразится в том, что сигнал присутствия транспортного средства будет существовать на выходе исполнительного блока постоянно, кратковременно прерываясь в момент появления в контролируемой зоне транспортного средства. Эта ситуация должна распознаваться внешним устройством.
Формула изобретения
чена к информационному входу синхронного детектора, выход которого соединен с информационным входом управляемого источника тока и входом блока выделения модуля, выход которого подключен к входу интегратора, вькод которого соединен с информационным входом порогового блока,выход которого соединен с первым входом управления управляемого источника тока, первый выход которого подключен к обмотке компенсации дифференциального феррозонда, второй выход синтезатора частот соединен с опорным входом синхронного детектора, третий выход синтезатора частот подключен к тактовому входу управляемого источника така, второй выход которого соединен с входом управления порогового блока, вход источника опорного напряжения которого является первым входом детектора, второй вход управления управляемого источника тока является вторым входом устройства.
первого элемента ИЛИ, выход которо- го соединен с тактовым входом реверсивного счетчика, выходы которого подключены к входам цифроаналогово- го преобразователя, выход которого
соединен с входом усилителя тока, выход которого является первым выходом управляемого источника тока, второй выход источника питания соединен с входом дифференцирующего элемента, выход которого подключен к первому йходу второго элемента ИЛИ, выход которого соединен с входом разрешения предварительной установки реверсивного счетчика и выходом обнуления триггера, прямой выход которого соединен с первым входом второго элемента И, выход которого подключен к второму входу первого элемента ИЛИ, второй вход второго элемента ИЛИ является вторым входом управления управляемого источника тока, второй вход первого элемента И и вход делителя ч-астоты объединены и являются тактовым входом управляемого источника тока, выход делителя
частоты соединен с вторым входом второго элемента И, третий вход второго элемента И является первым входом управления управляемого источника тока, третий выход источника питания подключен к информационному входу ключа, второй и третий выходы источника питания подключены к входам предварительной установки реверсивного счетчика.
Фие.Ъ
0/п5лома
Ч
32
Ъ
иг.
| Патент ФРГ № 3202631, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Магнитометрический детектор транспорта | 1982 |
|
SU1037319A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
