Изобретение относится к устройствам для определения параметров транспортных потоков, например интенсивности, скорости, времени присутствия транспортных средств в контролируемой зоне, и может быть использовано в автоматизированных системах управления дорожным движением, в аппаратуре исследбвания транспортных потоков, а также в устройствах автоматики и телемеханики.
Известно устройство, содержащее дифференциальный феррозонд, обмотка возбуждения которого подключена к выходу генератора, а выходная обмотка магнитометра связана с входом амплитудного выпрямителя и со схемой компенсации магнитного поля Земли, усилитель, один вход которого соединен с выпрямителем, другой вход - с источником опорного напряжения, а выход усилителя связан с рел.е 1 .
Наиболее близким к изобретению по технической сущности является устройство, содержащее N магнитометров, выходные обмотки которых, включенные последовательно через усилитель тока и амплитудный выпрямитель, подключены к входу порогового элемента, эыход которого соединен с исполнительным блоком, выход амплитудного выпрямителя через элемент задержки подключен к блоку, сравнения, выход которого подключен к соединенным последовательно выходным обмоткам магнитометров, обмотки возбуждения которых соединенные последовательно через делитель частоты подключены к генератору 2.
Недостатком известных устройств является то, что они требуют первоначальной настройки при установке их на объекте.
Кроме того, в процессе эксплуатации может возникнуть необходимость подстройки устройств. Это вызвано тем, что для обеспечения нормального рабочего режима магнитометров (феррозондов) необходимо обеспечить заданный ток возбуждения, В связи с тем, что длина линии связи между электронной схемой и-магнитометром (ферро зондом) изменяется в широких . пределах для разных устройств, возникает необходимость их настройки на заданную длину линии связи. Подстройку необходимо повторять при замене устройств или изменении параметров линий связи.
Целью изобретения является повышение точности и удобства эксплуатации устройства.
Поставленная цель достигается тем, что в магнитометрический детектор транспорта, содержащий дифференциальный феррозонд, выходная обмотка которого через последовательно соединенные усилитель тока и первый амплитудный выпрямитель подключена к одному входу порогового элемента, другой вход которого является информационным входом детектора, выход порогового элемента подключен к исполнительному блоку, выход первого амплитудного выпрямителя через элемент задержки подключен к первому входу первого блока сравнения, второ вход которого является первым тактовым входом детектора, выход первого блока сравнения соединен с обмоткой компенсации дифференциального феррозонда, генератор, введены регулятор тока, датчик тока, второй амплитудный выпрямитель и второй блок сравнения, выход генератора последовательно через регулятор тока подключе квходу датчика тока, первый выход которого соединен с обмоткой возбуждения феррозонда, другой выход датчика тока через второй амплитудный выпрямитель подключен к первому входу BTOpioro блока сравнения, второй вход которого является вторым тактовым входом детектора, выход второго блока сравнения подключен к другому входу регулятора тока.
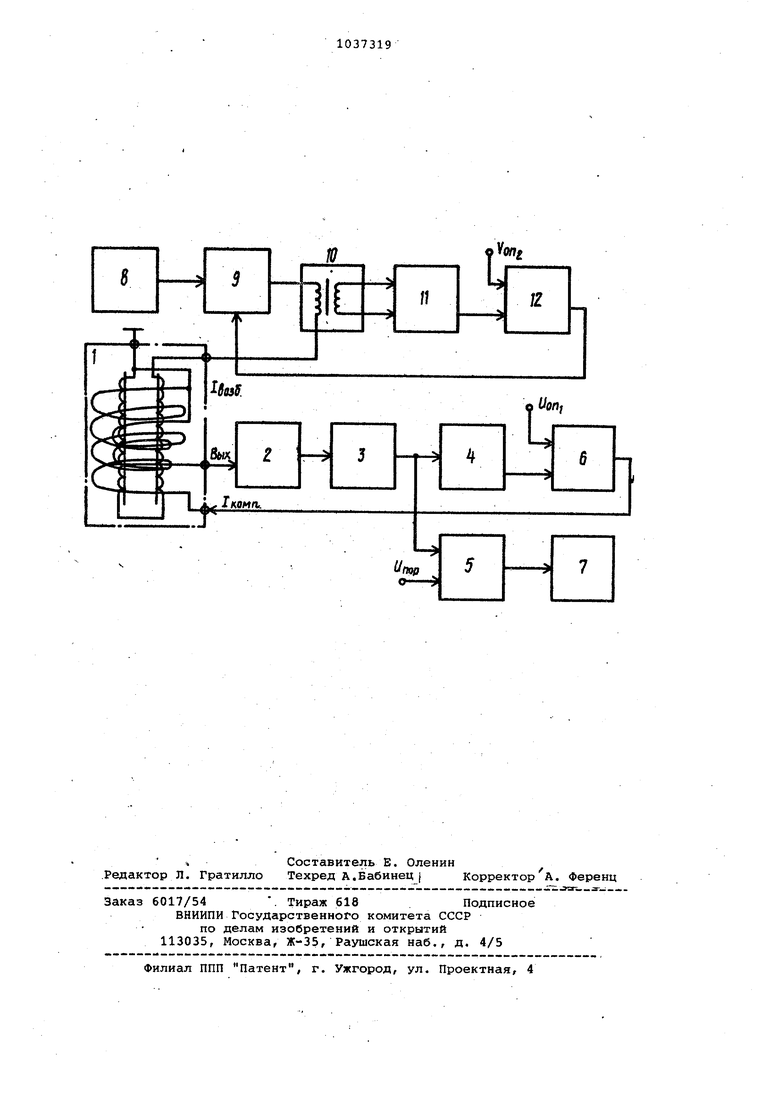
На чертеже представлена предлагаемая блок-схема детектора.
Магнитометрический детектор транспорта содержит дифференциальный феррозонд 1, выходная обмотка которого подключена к входу усилителя 2 тока, амплитудный выпрямитель 3, вход которого подключен к выходу усилителя 2 тока, а выход - к входу элемента 4 задержки и к одному из входов порогового элемента 5, другой вход которогосоединен с выходной клеммой источника порогового напряжения, выход элемента 4 задержки подключен к одному из входов -блока 6 сравнения, другой вход которого соединен с выходной клеммой первого источника опорного напряжения, а выход подключен к обмотке компенсации феррозонда 1, выход порогового элемента 5 подключен к исполнительному блоку 7, генератор 8, выходом соединенный с одним из входов регулятора 9 тока;; датчик 10 тока,, вход которого связан с выходом регулятора 9 тока, одним выходом подключенного к обмотке возбуждения феррозонда 1, а другим выходом - к входу амплитудного выпрямителя 11, выход амплитудного выпрямителя 11 соединен с входом блока 12 сравнения, другой вход которого подключен к выходной клемме второго источника опорного напряжения, а выход Iнен с другим входом регулятора 9 тока.
Устройство работает следующим образом. После включенияустройства регулятор 9 тока находится в таком состоянии, что через датчик 10 тока протекает минимальный ток. При этом на выходе выпрямителя 11 появляется напряжение, величина которого меньш значения опорного напряжения tooy О эти сигнала поступают на входы блока 12 сравнения, в результате на вы ходе последнего появляется сигнал, который подается на вход регулятора тока и- приоткрывает его. Увеличение тока возбуждения приводит к увеличению выходного напряжения выпрямителя 11. Как только величина сигнал на выходе выпрямителя 11 превысит величину опорного напряжения iy, знак результирующего напряжения на выходе блока 12 сравнения изменится на противоположный и регулятор 9 тока начнет закрываться. Значение опорного напряжения выбирается таким образом, чтобы равенство вход ных напряжений блока 12 сравнения обеспечивалось при заданном значении тока возбуждения феррозонда 1. В связи с тем, что изменение длины линии связи приводит к изменению выходнрго напряжения феррозон да 1, в устройстве предусматриваетс автоматическая подстройка этого напряжения, для чего выходное напря жение феррозонда 1 через усилитель -тока подается на вход амплитудного выпрямителя 3, выходное.напряжение которого поступает на вход элемента 4 задержки и на один из входов порогового элемента 5. Выходной сигнал элемента 4 задержки, задержанный относительно входного сигнала на время V , поступает на вход блока 6 сравнения, который сравнивает поступающий, сигнал с опорным напряжением (. Выходной.сигнал с блока б сравнения управляет током компенсации ферро- зонда 1, с помощью которЬго на выходе выпрямителя 3 поддерживается заданный уровень напряжения, опрвг деляемый величиной и Пороговый элемент 5 срабатывает в мЬмент равенства выходного напряжения амплитудного выпрямителя 3 / величине порогового напряжения Unop. При въезде .транспортного средства в контролируемую зону устройства сигнал на выходе феррозонда 1 полунает приращение. Этот сигнал через усилитель 2 тока и амплитудный выпрямитель 3 поступает на вход порогового элемента 5, который срабатывает и формирует сигнал, соответствующий времени присутствия транспортного средства в контролируемой зоне. Отработка приргцдения выходного напряжения феррозонда 1 через его обмотку компенсации происходит очень медленно. Это связано с тем, что постоянная времени Т элемента 4 задержки выбрана достаточно большой и .превышает время присутствия траиспортного средства в контролируемой зоне при движении его с минимальной скоростью. После выезда транспортного средства из контролируемой зоны устройство возвращается в исходное состояние. Время возвращения устройства в исходное состояние значительно меньше, чем постоянная времени Т . Исполнительный блок 7 формирует выходной сигнал, соответствугаций прохождению или присутствию транспортного средства в контролируемой зоне. Введение в магнитометрический детектор транспорта, регулятора тока, датчика тока, второго амплитудного выпрямителя, второго блока сравнения и их связей позволяет автоматизировать настройку устройства, сократить время, необходимое на пусконаладочные работы, и повысить точность устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 1996 |
|
RU2103703C1 |
| Цифровой феррозондовый магнитометр | 1982 |
|
SU1114997A1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2010 |
|
RU2441250C1 |
| Цифровой феррозондовый магнитометр | 1986 |
|
SU1437811A1 |
| Магнитометр | 1979 |
|
SU873170A1 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОКА КАТОДНОЙ ЗАЩИТЫ | 2008 |
|
RU2379673C1 |
| Устройство для автоматического мониторинга магнитных полей | 2017 |
|
RU2643233C1 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| ПРЕОБРАЗОВАТЕЛЬ ГЕОМАГНИТНОГО ПОЛЯ ДЛЯ ИНКЛИНОМЕТРА | 2002 |
|
RU2249790C2 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО МАГНИТОМЕТРИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ МЕТАЛЛА ТРУБОПРОВОДА | 2006 |
|
RU2306554C1 |
МАГНИТОМЕТРИЧЕСКИЙ ДЕТЕКТОР ТРАНСПОРТА, содержащий дифференциалБНый феррозонд, выходная обмотка которого через последовательно соединенные усилитель тока и первый амплитудный выпрямитель подключена к одному входу порогового элемента, другой вход которого является .информационным входом детектора, выход порогового элемента подключен к исполнительному блоку, выход первого амплитудного выпрямителя через элемент задержки подключен к первому входу первого блока сравнения, второй вход коуорогр является первым тактовым входом детектора, выход первого блока сравнения соединен с обмоткой компенсации дифференциального феррозонда, генератор, отличающийся тем, что, с целью повьЕиения точности детектора, в него введены регулятор тока, датчик тока, второй амплитудный выпрямитель и второй блок сравнения, выход генератора последовательно через регулятор тока подключен к входу датчика тока, первый выход которого соединен с обмоткой возбуждения феррозонда, другой выход датчика (Л тока через второй амплитудный выпрямитель подключен к первому входу второго блока сравнения, второй вход которого является вторым тактовым входом детектора, выход второго блока сравнения подключен к другому входу регулятора тока. со VI со QD