Изобретение относится к области геофизики и может быть использовано при исследовании физико-механических характеристик грунтов каротажем при инженерно-геологических изысканиях.
Целью изобретения является повышение точности и производительности работ за счет автоматизироваиной обработки измерительной информации
1
в реальном масштабе времени по комплексу измеряемых параметров с приведением ее к единым горизонтам исследования по грунту.
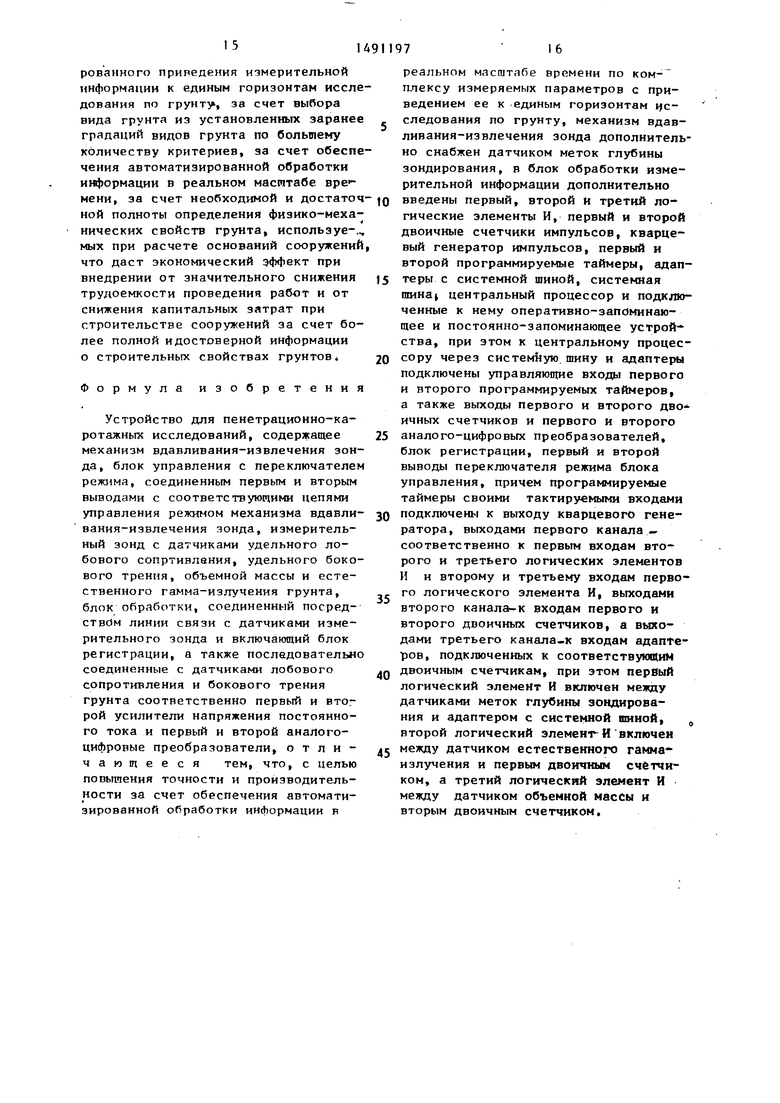
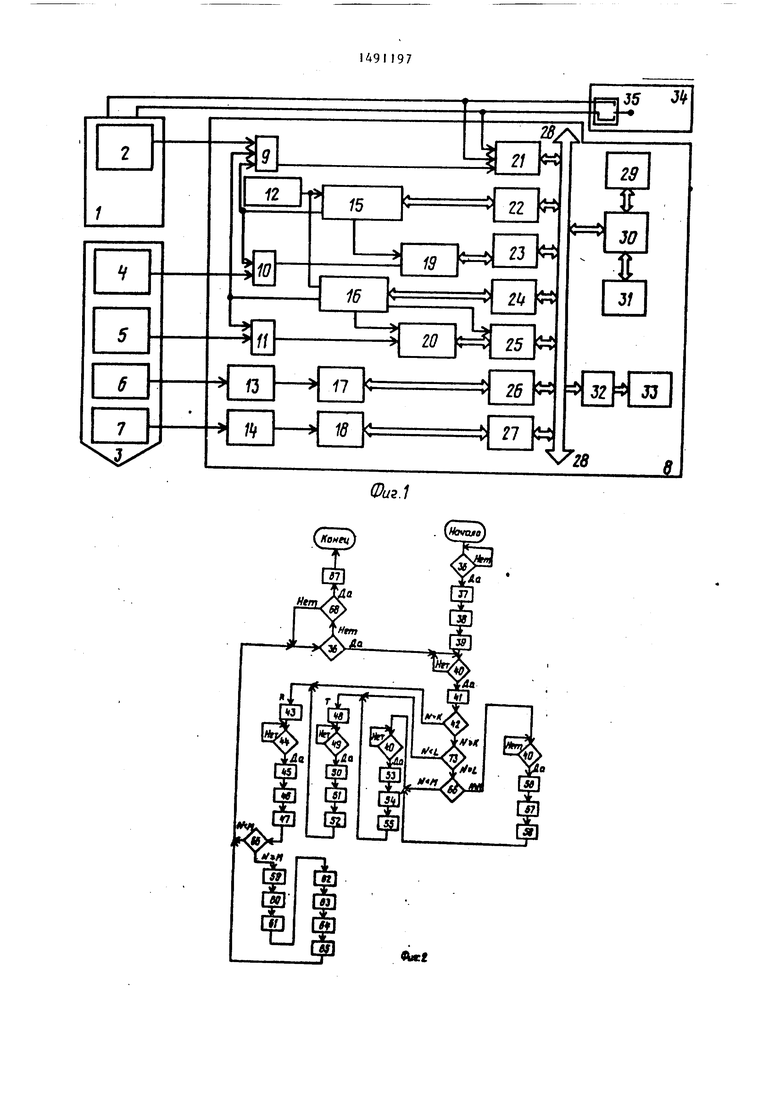
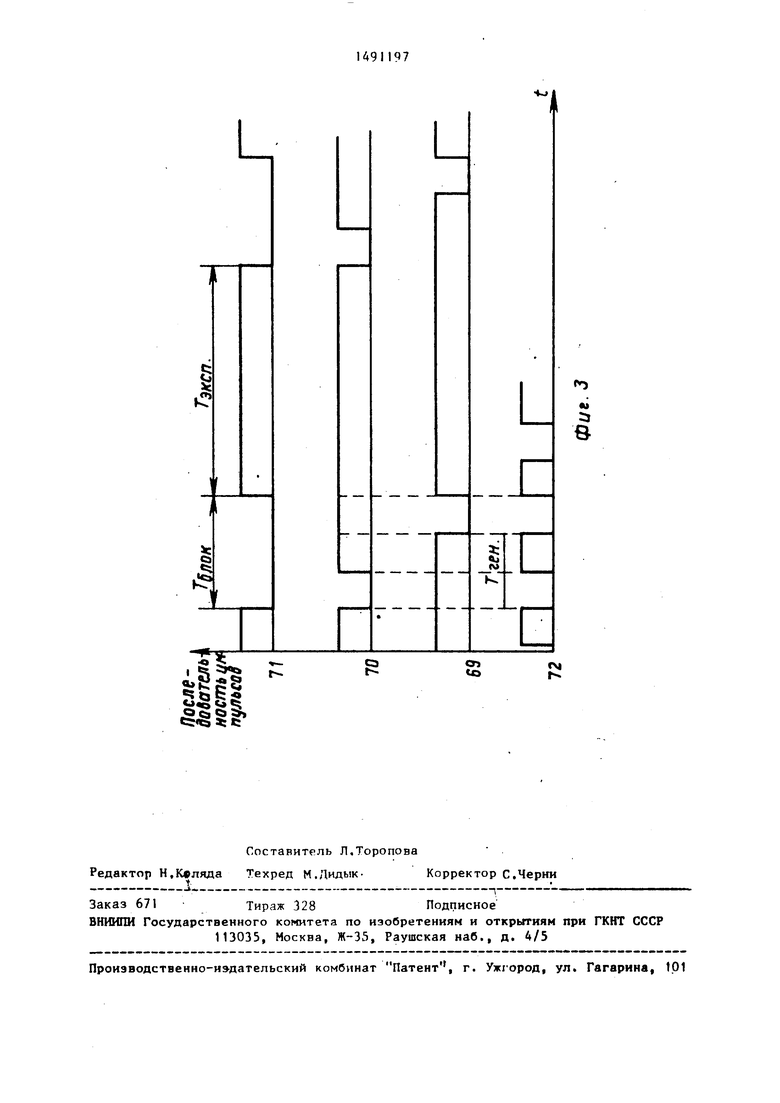
На фиг.1 дана структурная схема устройства; на фиг.2 - блок-схема , алгоритма; на фиг.. 3 - последовательности импУльсов управления процессом сбора информации для радиометрических
каналов и согласования его с процессом ввода информации в центральный процессор.
Устройство состоит из механизма 1 вдавливания-извлечения зонда, в котором размещен датчик 2 меток глубины зондирования,пенетрационно-ка- ротажного зонда 3, в котором разме- дены измерительные датчики 4-7 соот- ветственно естественного гамма-излучения грунта, объемной массы грунта, определяемой гамма-гамма методом по рассеянному в грунте гамма- излучению от источника, удельного трения Т по боковой поверхности зонда, удельного лобового сопротивления R вдавливанию конуса, блок 8 обработки информации, который содержит первый, второй и третий логические элементы И 9-11 соответственно, кварцевый генератор 12, дифференциальные усилители 13 и 14 напряжения постоянного тока, первый и второй программируемые таймеры 15 и 16, аналого- цифровые преобразователи АЦП 17 и 18 первый и второй двоичные счетчики 19 и 20, адаптеры 21-27, системную тину 28, оперативно-запоминающее устройство 29, центральный процессор 30 постоянно-запоьшнающее устройство 31 адаптер 32, блок 33 регистрации и блок 34 управления с переключателем 35 режима.
Сигналы от датчиков 2, 4, 5, 6 и 7 подаются к блоку 8 обработки информации по параллельным одинаковым каналам. Сигнал от датчика 2 меток глубины зондирования подается на один из входов трехвходового первого логического элемента И 9, выход которого через адаптер 2 подключен к системной гаине 2В, второй и третий входы первого логического элемента И 9 подключены соответственно к выходам первых каналов первого и второго программируемых таймеров 15 и 16, Сигнал от датчика 4 естественного гамма-излучения груита подается на один из входов двухвходового второго логического элемента И 10, выход которого подключен к счетному входу первого двоичного счетчика 19, подключенного выходом через адаптер 23 к системной пине 28, причем второй ВХ9Д второго логического элемента И 10, вход сброса в ноль первого двоичного счетчика 19 и вход записи информации в адаптер 23 соединены
соответственно с выходами первого, второго и третьег о каналов первого программируемого таймера 15, подключенного через адаптер 22 к центральнму процессору 30 через системную шину 28. Сигнал от датчика 5 объемной иассы аналогично подается в цепь состоящую из третьего логического элемента И 1I, второго двоичного счетчика 20, второго программируемого таймера 16, адаптеров 24 и 25, Тактируемые входь программируемых таймеров 15 и 16 подключены к выходу кварцевого генератора 12, Датчики 6 и 7 удельного трения по боковой по верхностя и удельного лобового сопротивления грунта через дифференциальные усилители 13 и 14 напряжения постоянного тока, аналого-цифровые преобразователи 17 и 18, адаптеры 26 и 27 соответственно также подключены к центральному процессору 30 через системную шину 28. Центральный процессор 30 соединен с оперативно-запоминающим устройством (ОЗУ) 29 и постоянно-запоминающим устройством (ПЗУ) 31, а также через системную шину 28 и адаптер 32 - с блоком регистрации 33. Первый и второй выводы переключателя 35 режима блока 34 управления, на которых появляется сигнал соответственно вдавливания или извлечения зонда, подключены к соответствующим цепям механизма I вдавливания-извлечения зонда и через адаптер 21 и системную шину 28 - к центральному процессору 30.
Алгоритм работы устройства обеспечивает выполнение следующих операций и решение следующих задач (см. фиг.2).
1.Пуск режима преобразования и обработки информации, инициируется блоком 36 алгоритма, который обеспечивает проверку состояния переключателя 35 режима блока 34 управления если переключатель установлен в положение Вдавливание, включен режим вдавливания зонда Да и осуществляется переход к последующим операциям
2.Организация сигналов управления в соответствии с фиг.3 обеспечивается блоками алгоритма 37, 38 и 39,
где блоки 37 и 38 соответственно выполняют запись в программируемые таймеры 15 и 16 управляющих слое, определяющих их режимы работы (программирование таймеров), а блок 39
5I49II
обеспечивает пуск режимов таймеров 15 и 16.
3. Ввод измерительной информации с приведением к единой отметке глубины g зондирования инициируется блоком алгоритма 40, обеспечивающим анализ наличия сигнала от датчика меток глубины зондирования 2; при наличии сигнала
Да , производится счет порядкового
номера его поступления (блок алгоритма 41) и сравнение с числами К, L и вьтолняемое соответственно блоками алгоритма 42, числа К, L и М соответствуют конструктивным расстояниям датчиков 6, 5 и 4 удельного бокового треиия, объемной массы и естественного гамма фона от датчика 7 удельного лобового сопротивления, выраженным в количестве сигналов от датчика 2 меток глубины зондирования.
4.Преобразование информации от датчика 7 удельного лобового сопротивления в цифровую форму и приведение ее к единым горизонтам исследо- вания по грунту, т.е. запись в строг определенные регистры ОЗУ-29, обеспечивается блоками алгоритма 43-47; блок 43 обеспечивает подачу сигнала
на аналого-цифровой преобразователь (АЦП) 18, блок 44 обеспечивает контроль готовности данных АЦП 18, блок 45 обеспечивает запись информации в регистр ОЗУ-29 с адресным номером S, блок 46 обеспечивает подготовку еле- дукмдего адреса регистра ОЗУ-29, увеличивая номер S на число Р, соот- ветствукидее количеству измерительных каналов (в устройстве Р 4), блок 47 обеспечивает вывод данных на ана- логовый регистратор, входящий в состав блока регистрации 33.
5.Преобразование информации от датчика 6 удельного бокового трения
в цифровую форму и приведение ее к единым горизонтам исследования по грунту обеспечивается блоками алгоритма 48-52: блок 48 обеспечивает подачу сигнала управления АЦП 17, блок 49,обеспечивает контроль готов- ности данных АЦП 17, блок 50 обеспечивает запись информации в регистр ОЗУ 29 с адресным номером S - I, блок 51 обеспечивает подготовку следующего адреса регистра ОЗУ-29, увеличивая номер S 1 на число Р, соответствующее количеству измерительных каналов, блок 52 обеспечивает вывод данных на аналоговый pierHCT-
g
0
5 0
5
0 5 0
5 5
976
ратор, входящий в состав блока регистрации 33.
6.Ввод информации от датчика 5 объемной жссы грунта, представленной в цифровой форме, и приведение ее к единым горизонтам исследования по грунту, обеспечивается блоками алгоритма 53-55, блок 53 обеспечивает запись информации в регистр ОЗУ 29
с адресным номером 5+2, блок 54 обеспечивает подготовку следующего адреса регистра ОЗУ 29, увеличивая номер S + 2 на число Р, соответствуют цее количеству измерительньпс каналов, блок 55 обеспечивает вывод данных на аналоговый регистратор, входящий в состая блока регистрации 33,
Перед блоком алгоритма 53 включен блок 40, обеспечивающий ввод данных в ОЗУ 29 только при наличии сигнала на выходе логического элемента И 9, что исключает ввод ложной информации при перезаписи информации из счетчиков 19 и 20 соответственно в адаптеры 23 и 25.
7.Ввод информации от датчика 4 естественного гамма-излучения и приведение ее к единым горизонтам исследования по грунту обеспечивается блоками алгоритма 56-58: блок 56 обеспечивает запись информации в регистр ОЗУ 29 с адресным номером S + 3,
блок 57 обеспечивает увеличение адресного номера S 3 на число Р,,блок 58 обеспечивает вывод даннъгх на ана- логовьтй регистратор, входящий в состав блока регистрации 33, Перед блоком алгоритма 56 включен блок 40, обеспечипающий согласование режимов ввода информации из адаптера 23 и записи новой информации в адаптер 23.
8, Обработка измерительной инфор- №ции в реальном масштабе времени обеспечивается блоками алгоритма 59-65: блок 59 обеспечивает выбор информации из ОЗУ 29, сгруппированной относительно первого горизонта по грунту, расчет отношения удельного лобового сопротивления к удельному боковому трению R/T и подготовку адресации для выбора информации из ОЗУ 29, группируемой для следующего горизонта по грунту; блок 60 обеспечивает проведение ассоциативного поиска по текущим значениям отношения R/T и естественного гамма-фона наиболее близкой градации вида rpjmта из градаций видов грунта, храня- шкхся в ПЗУ 31, т.е. определение вида грунта для текущего горизонта исследования по грунту; блок 61 обеспечивает расчет модуля деформации Е oiR, значение коэффициента rf выбирается из ПЗУ 31 в соответ- . ствии с установленным видом грунта; блок 62 обеспечивает расчет коэффициента пористости по текущему I значению объемной массы грунта и значению удельной массы породообразующих минералов, выбираемому из ПЗУ 31 в соответствии с определенным видом грунта; блок 63 обеспечивает нахождение отношения /Ь блок 64 обеспечивает выбор ближайшего к определенному
отношению табличного значения из значений, хранящихся в ПЗУ. 31 для определенного вида грунта и соответствующих ему нормативных значений угла внутреннего трения ( и сцепления С; блок 65 обеспечивает размещение в ОЗУ 29 значений величин Е, ,4f , С и кода определенного вида грунта. Обработка информации начинается только тогда, когда информация от всех датчиков сгрупг лрована относительно
первого горизонта, поэтому перед блоко алгоритма 59 включен блок алгоритма 66.
9. Вывод всей информации, отнесенной ко всем горизонтам исследования разреза грунта, обеспечивается блоком 67,алгоритма, переход к которому обеспечивается блоком 68, осущест- ВЛЯЮ1ЧИМ контроль за установкой переключателя режима 35 блока управления 34 в положение Извлечение зонда, что соответствует окончанию режима вдавливания зонда, окончанию производства измерений и обработки информации.
Устройство для пеиетрационно-ка- ротажны исследований функционирует следу1ощин образом. При подключении устройства к напряжению питания цент- ральнмй процессор 30 начинает производить Операцию анализа состЬяния переключателя 35 режима, блока 34 управления, предусмотренную блоком 36 алгоритма работы, при установке переключателя435 режима в положение Вдавливание подается сигнал управления к механизму 1 вдавливания зонда и начинается вдавливание зонда 3 в грунт, что соответствует переходу , Да блока 36 алгоритма работы. Центральный npouectop 30 выполняет
0
5
0
5
С
5
0
5
0
5
операции, предусмотренные блоками 37, 38 и 39 алгоритма работы, т.е. происходит программирование режимов работы таймеров 15, 46 и их пуск (подключение управляющих входов таймеров к центральному процессору и запись в них управляющих слов). На , выходах каждого из трех каналов таймеров 15 и 16 вырабатываются соответственно три распределенных во времени последовательности импульсов 69, 70 и 71 (см. фиг.З), где 69 - последовательность импульсов сброса в ноль двоичных счетчиков 19 и 20, 70 - последовательность импульсов . записи информации с выходов двоичных счетчиков 19 и 20.в соответствующие им адаптеры 23 и 25, 71 - последовательность импульсов блокировки логических элементов И соответственно 10 и 11, причем период времени между передним и задним фронтами импульсов блокировки последовательности импульсов 71 является временем экспозиции Тj j радиометрических каналов, в течение которого производится статистический счет импульсов двоичными счетчи- - ками 19 и 20. Импульсные последовательности 69, 70 и 71 формируются таймерами 15 и 16 из последовательности тактовых импульсов 72 на выходе кварцевого генератора 12 и предназначены для задания времени экспозиции каждого из радиометрических каналов от датчиков 4 и 5, управление процессом перезаписи информации из счетчиков 19 и 20 в соответствующие им . адаптеры 23 и 25, обнуление счетчиг ков 19 и 20, а также блокировки логических элементов 10 и I1 соответ- ственио и логического элемента 9 на время перезаписи информации.
Информация на выходе датчиков 4 и 5 естественного гамма-излучения грунта и объемной массы грунта пред- ставлена в виде случайно распределенных во времени электрических импульсов, а на выходе датчиков 7 и 6 лобового сопротивления и бокового трения в аналоговом виде (напряжение постоянного тока), поэтому приведение к единому цифровому виду заключается в статистическом ttaCoi e информации (счет электрических импульсов за установленное время экспозиции) для радиометрических каналов измерения и циклическом ана
jioi o-цифрором ripenfипзопянин штя аналоговых каналов измерения.
Дискретный ввод информации в ОЗУ 29 связан с детальностью исслеловаимя по грунту и обычно удоплетворяе детальность исследования по грунту с разрепением- З см j что соответствует времени зондирования (при номи- анльной скорости зондирования 100 см/мин) около 3 с. Таким образо если установить дискретный ввод информации через каждые 5 см зондирования грунта (через каждые 5 см зондирования должна поступать метка от датчика 2 меток глубины зондирования) , ввод и обработка информаци должны осуществляться за время мене 3 с (запас по времени должен быть около 30%). При среднем быстродей- ствии ЭВМ 250 тыс. операций в секунду поставленная задача выполнима.
Необходимость обеспечения определенных приоритетов в работе функциональных узлов в процессе преобра- зования и ввода информации от датчиков А-7 радиометрических и тензо- метрических каналов в ОЗУ 29, связана с тем, что имеют место два распределенных и несинхронизированных во времени процесса; статистический набор информации радиометрических каналов.за время экспозиции, причем времена экспозиции для каналов измерния естественнаго гамма фона и объем ной массы грунта могут быть различны а запись этой информации в соответствующие адаптеры 22 и 23; циклический во времени ввод информации всех измерительных канлов в ОЗУ 29 при наличии сигнала от датчика 2 меток глубины зондирования.
После выполнения операций, предусмотренных блоками алгоритма 37-39, центральный процессор 30 переходит к анализу наличия сигнала от датчика 2 меток глубины зондироваяия. До начала вдавливания зонда в грунт датчи 2 меток глубины зондирования находитМЯ в исходном состоянии, которому
соответствует . Сигнал логического нуля на его выходе, что соответствует отсутствию сигнала от датчика 2, и процессорное устройство 30 выполняет операцию, предусмотренную бло- ком 40 алгоритма работы, т.е. находится в режиме циклического опроса сигнала от датчика 2 меток глубины зондирования. По мэре вдавливания
(I
зондл 3 в 1 рунт датчики 7 токдл начинают измерять параг)етрм i-румтп. Первым начинает реагироппть на реакцию грунта датчик 7 лобового сопро- тч пеннп R грунта, через некоторое время (глубину вдавливания) датчик 6 бокового трения, затем начинает получать информацию датчик 3 o6i ehniori массы грунта и датчик 4 естественного гамма-излучения, т,е. датчики, расположенные в зонде,проходят один и тот же горизонт грунта и разное премп. R процессе вдавлииания зонда датчик Г исток глубины зондирования начинает движение, синхронное с по- CTynaTenbHi-n-i перемещением зонда 3. и вырабатывает сигналы через разные отрезки линейного перемещения зонда 3 уровнем логической I при прохождении магнитной метки на пеиетра- ц|тонной штанге мимо чувствительного элемента датчика. Датчики 6 и 7 лобового сопротивления и бокопого трения преобразуют механические воздействия реакции грунта в величины напряжений постоянного тока, которые усиливаются усилителями 13 и 1А напряжения постоянного тока соотрет- ственно и поступают на входы аналого цифровых п)еобразователей 17 и 18, которые предназначены для преобразования аналоговых величин в числовой двоичный код при подаче управляющего сигнала от центрального проце гсора 30 Датчик 5 объемной массы грунта детектирует рассеянное в грунте гамма- излучение от встроенного в зонд 3 источника гамма-излучения, а детектор гамма-излучения датчика 4 регистрирует естественный радиоактивный фон грунта. На выходе детекторов гамма-излучения датчиков Аи 5 присутствуют импульсы напряжения, количество которых за время экспозчции связано зависимост но с объемной массой грунта (датчик 5) и естественной гамма-активностью грунта (датчик А). Счет импульсов за время экспозиции производится двоичными счетчиками 19 и 20, Процесс статистического набора информации и записи в соответствующие адаптеры 23 и 25 установлен последовательностями импульсов 69, 70 и 71 на выходе каналов таймеров 15 и 16, представленными на фиг.З. Чтобы не происходило наложений при одновременном поступлении сигналов на ввод информации п ОЗУ 29 от датчика I MCTov. глубины зоидирорания и мл перезапись информации радиометрических кпнанов в зД Тпперы 23 и 25 по сигналам от программируемых тай- мерон 15 и 16, приоритет отдается процессу перезаписи информации в адаптеры 23 и 25, а -затем уже вводу информации п ОЗУ 29.
Логические элементы И 10 и 11 предназначены для блокировки поступления счетных импульсов на вход счетчикор 19 п 20 п момент перезаписи информа и1и I адаптеры 23 и 25 и обнуления счетчиков 19 и 20, что пpeдoтr pa0 aeт состязаггие микросхем и запись ложной информации.
При поступления первого сигнала от датчика меток глубины 2, что соот ветстиупт nepFuiny горизонту исследования гю rpyirry, центральный процессор 30 выполняет последовательность онераци, предусмотренных блоками алгоритма 43-47, 66,, 36 и выходит н V S -KHi-i запроса следугап1его сиг- HajTa от датчика 2 меток глубины, Выполнение этих операций равнозначно вяолу измерительной информации от датчик. 7 ТОКОВОГО сопротивления Р в числовом виде в определенную ячейку ОЗУ 29. Эта операция будет вьтол мяться ;;о тех пор для следующих горизонтов неснедования по грунту, пока в груи-1 пе внедрится датчик 6 бокового трония, что будет соответствовать числу сигналов от датчика меток глубингл зондирования и центральный пропс-ссор 30 перейдет на последопательность операций, пред- усмотрешсыя блоками алгоритма 41, 42 73, 48, аЗ-47, 66, 36.
Аналогично тгри достижении первого горизонта исследопания по грунту датчиком 5 объешюй массы, централь пмй процессор 30 перейдет на выполнение последовательности операций, предусмотренных блoкa n алгоритма 41 42, 73, 66, 40, 53-55, 48-52, 43-47, 65 и 36, а при достижении первого горизонта исследования по грунту датчиком естественного гамма-излучения 4 к последовательности операций блоков ал1-оритмов 41, 42, 73,66, 40, 56-58, 40, 53-55, 4Я-52, 43-47,66, 59-65 и 36,
Лятчики 4-7 параметров конструк7ивно расположены в зонде не ил ОД1К1М у)1оппе, рясстопние между :1агчи1:ам 1 изпосчно, пссюннно и может быть выражено в количестве сигналов датчика 2 меток глубины зондирования. Т.е. известны адреса ячеек 01ЯУ 29, в которых размещена информация, соответствующая определенным горизонтам по грунту, что используется при выборе информации из ОЗУ с Т1,елью ее обработки.
0 В процессе выполнения перечисленных операций центральным процессором 30, происходит запись информации в строго определенные ячейки ОЗУ 29 и группировка их в соответствии с опре5 деленными горизонтами исследования по грунту. Непосредственно обработка информации начинается, когда в ОЗУ 29 введена информация от всех датчиков по отношению к первому горизонту
0 исследования по грунту, т.е. начиная с этого цикла и для последующих циклов центральный процессор 30 выполняет последовательность операций, предусмотренных блоками алгоритма
5 59-65.
Процесс зондирования, преобразования и обработки информации приостанавливается при прекращении сигнала Вдавливание от переключателя 35
0 режима блока 34 управления ( переключатель 35 режима установлен в среднее положение и возобновляется при подаче этого сигнала. При установке переключателя 35 режима в положение Извлечение подается сигнал механизму 1 вдавливания зонда на извлечение зонда 3 из грунта, что означает окончание режимов вдавливания зонда 3, преобразования и обработки инфорQ мации, и центральный процессор 30 переходит к выполнению операций по выводу комплекса информации на цифровую регистрацию, предусмотренных о блоком 67 алгоритма. Анализ состоя5 НИИ переключателя 35 режиме обеспечивается выполнением операций, предусмотренных блоками алгоритма 36и68.
Последовательности импульсов от программируемых таймеров 15 и 16 и датчика 2 меток глубины зондирования не синхронизированы во времени, поэтому сигналы перезаписи информации радиометрических каналов в адаптеры 23 и 25 могут появиться одновременно
j с сигналом ввода информации в ОЗУ 29, что может привести к записи ложной информации, для исключения этого режима,введен логический элемент И 9, блокирующий поступление сигнала от
5
0
датчика 2 меток глуОциы зондирования при поступлении на его входы сигналов блокировки от программируемых таймеров 15 и 16 .уровнем логического О в момент перезаписи информации В адаптеры 23 и 25.
Адаптеры 21-27 и 32 предназначены для обеспечения программно-управляемой связи периферийных устройств с системной шиной 28 центрального процессора 30.
ПЗУ 31 предназначено для хранения числовых значений коэффициентов корреляции об , числовых значений показателей, соответствующих установленным градациям видов грунта, таблиц числовых значений для выбора нормативных значений показателей f и С в соответствии с определенными градациями вида грунта, а также программы работы устройства в соответствии с приведелиьсм алгоритмом его работы.
Блок регистрации 33 предназначен для аналоговой и цифровой регистрации измерительных данных,
В процессе обработки информации должны определяться оснозные физико- механические свойства грунта, исг пользуемые при расчетах оснований сооружений: Е - модуль дефо(мации грунта; ср - угол внутреннего трения; С - сцепление; 5 - коэффициент пористости грунта.
Физико-механические свойства грунта определяются на основании измеренных текущих параметров свойств грунта, отнесенных к опре- ; деленному горизонту, эмпирических зависимостей и нормативных значений.
Модуль деформации грунта Е определяется на основаиии зависимости E-etR| где oL - коэффициент корреляции, зависящий от вида грунта:
а
dU
3,0 3,6 5,5 7,0
Для определения вида грунта рас считывается отношение величины удельного лобового сопротивления R к величине удельного бокового трения Т.
По тркушиь зилчс-ниям отнпшс;:ия R/T и неличины естестпепного фона произродится ассоциативный
поиск с целью выбора ближайшего вида грунта из числа градаций видов грунтов по соотретстпуктцим показателям в числовом выражении, хранящимся в ПЗУ 31 .
Для ассоциативного поиска выбраны следующие границы изменчивости, соответствующие иринятьпч градациям грунтов:
Вид грунта
Отношение R/T
Естественный гамма-йю и Вт/кг. 10
25
Рассчитывается коэффициент пористости на основании зависимости
У 9 Уо8Г
IfoSh
Вид грунта
измеренное значение объем- но.й массы грунта; удельная месса породообра- зутсщих минералов, принимаемая зависимости от вида грунта:У.г/см
;
|40
50
55
ьПесок 2,65 Супесь 2,66 Суглинок 2,70 Глина 2,75
Нормативные значения угла внутреннего трения tf и сцепления С определяются по значениям когчффициента по- е ристости грунта 6 и модуля деформации грунта Е для определенного вида грунта, таблицы нормативных значений для определенньпс видов грунта в числовом выражении хранятся в ПЗУ 31 и показатели выбираются на основании ассоциативного поиска соответствия текущих параметров табличным.
Применение устройства для пенетра- ционно-каротажных исследований позволит повысить достоверность, качество результатов пенетрационно-каро- тажных исследований, их информативность и значительно повысит производительность работ за счет автомптизированного припедения измерительной информации к единым горизонтам исследования по , за счет выбора вида грунта из установленных заранее градаций видов грунта по большему количеству критериев, за счет обеспечения автоматизированной обработки информации в реальном масштабе мени, за счет необходимой и достаточ ной полноты определения физико-механических свойств грунта, используе-. мых при расчете оснований сооружений что даст экономический эффект при внедрении от значительного снижения трудоемкости проведения работ и от снижения капитальных затрат при строительстве сооружений за счет более полной идостоверной информации о строительных свойствах грунтов
Формула изобретения
Устройство для пенетрационно-ка- ротажных исследований, содержащее механизм вдавливания-извлечения зонда, блок управления с переключателем режима, соединенным первым и вторым выводами с соответствующими цепями управления режимом механизма вдавли- вания-извлечения зонда, измерительный зонд с датчиками удельного лобового сопртивления, удельного бокового трения, обьемной массы и естественного гамма-излучения грунта, блок обработки, соединенный посред- cTBdM линии связи с датчиками измерительного зонда и включающий блок регистрации, а также последовательно
соединенные с датчиками лобового
сопротивления и бокового трения грунта соответственно первый и второй усилители напряжения постояино- го тока и первый и второй аналого- цифровые преобразователи, о т л и - чающееся тем, что, с целью повьтения точности и производительности за счет обеспечения автоматизированной обработки информации в
0
5 о
5
0
г
реальном масштабе времени по комплексу измеряемых параметров с приведением ее к единым горизонтам цс- следования по грунту, механизм вдавливания-извлечения зонда дополнительно снабжен датчиком меток глубины зондирования, в блок обработки измерительной информации дополнительно введены первый, второй И третий логические элементы И, первый и второй двоичные счетчики импульсов, кварцевый генератор импульсов, первый и второй программируемые таймеры, адаптеры с системной шиной, системная шина центральный процессор и подключенные к нему оперативно-запоминающее и постоянно-запоминающее устрой ства, при зтом к центральному процессору через системйуто. шину и адаптеры подключены управляющие входы первого и второго программируемых таймеров, а также выходы первого и второго двоичных счетчиков и первого и второго аналого-цифровых преобразователей, блок регистрации, первый и второй выводы переключателя режима блока управления, причем программируемые таймеры своими тактируемыми входами подключены к выходу кварцевого генератора, выходами первого канала соответственно к первым входам второго и третьего логических элементов И и второму и третьему входам первого логического элемента И, выходами второго канала к входам первого и второго двоичных счетчиков, а выходами третьего канала к входам адаптеров, подключенных к соответствующим двоичным счетчикам, при этом первый логический элемент И включен мелщу датчиками меток глубины зондирования и адаптером с системной пшиой, второй логический элемент-И включен между датчиком естественного гамма- излучения и первым двоичным счётчиком, а третий логический элемент И между датчиком объемной массы и вторым двоичным счетчиком.
Aicf
«и
:э В
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| Устройство для управления электропотреблением предприятия | 1983 |
|
SU1125605A1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2010 |
|
RU2456644C2 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| Ультразвуковой терапевтический аппарат | 1989 |
|
SU1717106A1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2012 |
|
RU2525644C2 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО КОНТРОЛЯ ЗАГРЯЗНЕНИЙ ВОДНОЙ СРЕДЫ, ДОННЫХ ОТЛОЖЕНИЙ И АТМОСФЕРЫ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ, УЛОЖЕННЫХ НА ДНЕ ВОДОЕМОВ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2331876C2 |
| Устройство для статического зондирования грунта | 1987 |
|
SU1521827A1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2014 |
|
RU2554283C1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2013 |
|
RU2549606C2 |
Изобретение относится к области геофизики и может быть использовано при инженерно-геологических исследованиях грунтов, в т.ч. морских. Целью изобретения является повьппе- ние точности результатов пенетрацион- но-каротажиых исследований и их производительности, .что достигается благодаря автоматизированной обработке инЛормации в реальном масптабе времени по комплексу измеряемых параметров от тензометрических и радиометрических датчиков, с приведением этой информации к единым горизонтам глубины исследования по грунту. Устройство содержит пенетрационный зонд с датчиками, механизм вдавливания, блок управления и связанный с датчиками блок обработки. В блок обработки измерительной информации дополнительно введены первый, второй и третий логические элементы И,(первый и второй двоичные счетчики импульсов, кварцевый Генератор импульсов, первый и второй программируемые таймеры, адаптеры с системной шиной, центральный процессор и подключенные к нему оперативное и постоянное за- ,поминающее устройство. Программное обеспечение и алгоритм обработки информации обеспечивают преобразование измерительной информации для расчета в реальном масгатабе времени строительных характеристик грунтов. 3 ил. г W ij со
. §00
gSgs
(S
л (о
CM
1
| Ферронский В.И | |||
| Пенетрацнонно- каротахные методы инженерно-геологических исследований | |||
| М.: Недра, 1969, с | |||
| Ведущий наконечник для обсадной трубы, употребляемой при изготовлении бетонных свай в грунте | 1916 |
|
SU258A1 |
| Авторское свидетельство СССР № 757635, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
