СП N5
00
tS5
| название | год | авторы | номер документа |
|---|---|---|---|
| Погружное устройство для вдавливания в грунт рабочих наконечников | 1981 |
|
SU1040041A1 |
| Устройство для пенетрационно-каротажных исследований | 1987 |
|
SU1491197A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ГРУНТОВ СТАТИЧЕСКОЙ И ДИНАМИЧЕСКОЙ НАГРУЗКОЙ | 2010 |
|
RU2446251C1 |
| Устройство для статического зондирования грунта | 1975 |
|
SU590645A1 |
| УСТАНОВКА ДЛЯ СТАТИЧЕСКОГО ЗОНДИРОВАНИЯ ГРУНТА | 1991 |
|
RU2020204C1 |
| Устройство для исследования грунтов | 1982 |
|
SU1076528A1 |
| Установка для статического зондирования грунта | 1977 |
|
SU708009A1 |
| Устройство для бурения и зондирования грунтов | 1983 |
|
SU1134713A1 |
| СПОСОБ ПРОВЕДЕНИЯ ИНЖЕНЕРНО-ГЕОЛОГИЧЕСКИХ ИЗЫСКАНИЙ | 2019 |
|
RU2706284C1 |
| Устройство для контроля перекоса рыболовного трала | 1990 |
|
SU1784154A1 |
Изобретение относится к области исследования свойств морских грунтов в условиях их естественного залегания методом статического зондирования при инженерно-геологических изысканиях под строительство сооружений на шельфе и позволяет повысить точность зондирования. Устройство содержит погружное устройство 1, силовой механизм 2 в виде гидроцилиндра двустороннего действия, анкерный механизм 3, глубиномер 4, датчики 6 и 7 соответственно лобового сопротивления и трения грунта, датчик 10 расхода, преобразователь 11 импульсов, формирователь 12 импульсов, элементы И 13 и 14, делитель 15 частоты, регистраторы 16 и 17. 2 ил.
иг./
: Изобретение относится к исследованию свойств морских грунтов в условиях их еЬтественного залегания методом статического зондирования при инженерно-геологических изысканиях под строительство соо- р1ужений на шельфе.
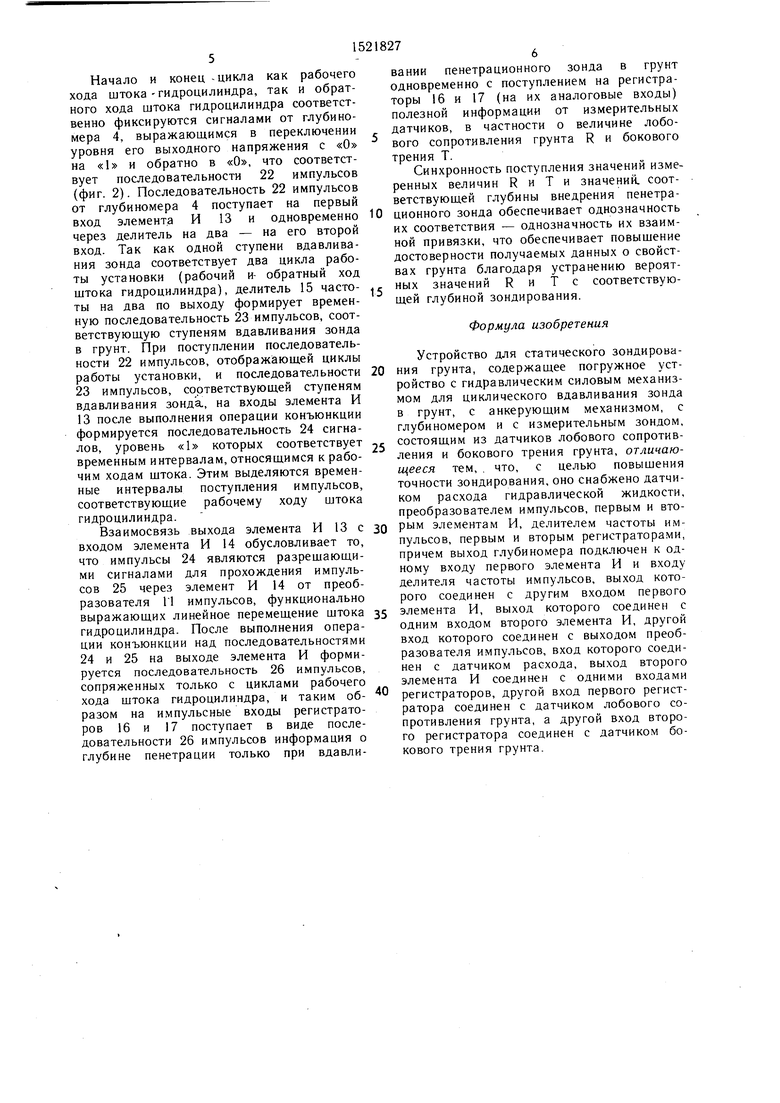
Целью изобретения является повышение точности зондирования. , На фиг. 1 представлена структурная блок- с1хема устройства; на фиг.- 2 - времен- ь|ые диаграммы работы блоков. j Устройство содержит погружное устройст- о 1, силовой механизм 2 в виде гидро- йилиндра двухстороннего действия, предназ- 1;1аченный для вдавливания измерительного в грунт, анкеруюший механизм 3, |1редназначенный для фиксации погружного устройства в обсадных трубах буровой Скважины на ее забое и восприятия уси- пия реакции грунта при задавливании измерительного зонда, глубиномер 4 в виде онцевого переключателя, предназначенный (для подачи сигналов в моменты начала |И конца хода штока силового меха- |низма, измерительный зонд 5 с датчи- ;ками 6 и 7 соответственно лобового со- :противления и трения грунта, предназначен- ными для определения механических харак- :теристик грунта в процессе зондирования; :гидравлическую линию 8, предназначенную лля подачи гидравлической жидкости под рабочим давлением к силовому механизму, электрическую линию 9 связи, датчик 10 расхода гидрожидкости, преоб- ; разователь 11 импульсов, формирователь 12 I импульсов с элементами И 13 и 14 и дели- i телем 15 частоты, предназначенный для-формирования из последовательности импульсов на выходе преобразователя 11 импульсов 10 сигналам от глубиномера 4 импульсных последовательностей во временных интервалах, соответствующих циклам вдавливания измерительного зонда в грунт, первый 16 и второй 17 регистраторы с импульсным 18 и измерительными 19 и 20 входами, вывод 21 электрической линии 9 связи, предназначенный для соединения вы- . хода глубиномера 4 с входом делителя 15 частоты импульсов и элемента И 13.
Временные диаграммы фиг. 2 отражают последовательность 22 синхро}1изирую1цих импульсов на выходе глубиномера 4, последовательность 23 импульсов на выходе делителя частоты 15, последовательность 24 импульсов на выходе элемента И 13, последовательность 25 импульсов на выходе преобразователя импульсов 11, последовательность 26 импульсов на выходе элемента И 14.
Устройство работает следующим образом.
Погружное устройство 1 на тросе опускают на забой скважины, обсаженной обсадными трубами, затем в поршневую полость гидроцилиндра силового механизма 2 по гидравлической линии 8 связи нагнетают рабочую жидкость от гидропривода (не показан), измерительный зонд 5 начинает вдавливаться в грунт и одновременно за счет усилия реакции грунта происходит анкеровка погружного устройства при помопхи анкерующего механизма 3 в обсадной трубе, при вдавливании измерительного зонда 5 в грунт производятся измерения механических свойств грунта датчиками лобового сопротивления грунта 6 и бокового трения грунта 7, из0 мерительные данные передаются по электрической линии 9 связи на измерительные входы 19 и 20 соответствующих регистраторов 16 и 17, после окончания рабочего хода штока гидроцилиндра, о чем
с свидетельствует сигнал уровня «О на выходе глубиномера 4, жидкость направляют в што- ковую полость гидроцилиндра силового механизма 2 и осуществляется холостой ход, при котором происходит разанкеровка анкерующего механизма 3 и сборка погруж0 ного устройства 1 в исходное состояние, о чем свидетельствует замыкание концевого переключателя глубиномера 4 и переключение его выходного сигнала с уровня «1 на уровень «О, после чего произг водится следующий цикл вдавливания измерительного зонда 5 в грунт, таким образом измерительный зонд 5 ступенчато вдавливается в грунт на всю длину. Следовательно, каждой ступени вдавливания измерительного зонда 5 в грунт соот0 ветствуют следующие циклы функционирования погружного устройства 1 (см. фиг. 2); анкеровка в скважине, рабочий ход штока гидроцилиндра (вдавливание зонда в грунт), разанкеровка в скважине, обратный ход щтока гидроцилиндра. На всех этапах
5 циклического зондирования при помощи датчика 10 расхода гидравлической жидкости производится измерение величины расхода и преобразование сигнала в преобразователе 11 импульсов, при подаче которых на импульсные входы регистраторов 16 и 17 в цикле вдавливания зонда 5 в грунт обеспечивается регистрация измерительных данных в функции частоты следования импульсов преобразователя 11 импульсов, при этом обеспечивается протяжка ленты ре5 гистратора синхронно с поступлением информации о глубине в следующей зависимости:
l,,... (t)(t)dt K3h3CH.i., где 111 рот
0
fi,MM(t) -функция изменения частоты
следования импульсов на на выходе преобразователя 11 импульсов;
V(t) -функция изменения расхода жидкости в гидросистеме;
Нзон.-1 - глубина зондирования; Кь К2, Кз - масщтабирующие коэффициенты;t- время зондирования.
0
- величина протяжки ленты регистраторов;
Начало и конец -цикла как рабочего хода штока-гидроцилиндра, так и обратного хода штока гидроцилиндра соответственно фиксируются сигналами от глубиномера 4, выражающимся в переключении уровня его выходного напряжения с «О на «1 и обратно в «О, что соответствует последовательности 22 импульсов (фиг. 2). Последовательность 22 импульсов от глубиномера 4 поступает на первый
вании пенетрационного зонда в грунт одновременно с поступлением на регистраторы 16 и 17 (иа их аналоговые входы) полезной информации от измерительных датчиков, в частности о величине лобового сопротивления грунта R и бокового трения Т.
Синхронность поступления значений измеренных величин R и Т и значений, соответствующей глубины внедрения пенетравход элемента И 13 и одновременно Ю ционного зонда обеспечивает однозначность через делитель на два - на его второй их соответствия - однозначность их взаим- вход. Так как одной ступени вдавлива- ной привязки, что обеспечивает повыщение ния зонда соответствует два цикла рабо- достоверности получаемых данных о свойст- ты установки (рабочий и- обратный ход вах грунта благодаря устранению вероят- щтока гидроцилиндра), делитель 15 часто- с ных значений R и Т с соответствую- ты на два по выходу формирует времен- щей глубиной зондирования, ную последовательность 23 импульсов, соответствующую ступеням вдавливания зондаФормула изобретения в грунт. При поступлении последовательности 22 импульсов, отображающей циклы Устройство для статического зондирова- работы установки, и последовательности 20 ния грунта, содержащее погружное уст- 23 импульсов, соответствующей ступеням ройство с гидравлическим силовым механиз- вдавливания зонда, на входы элемента И 13 после выполнения операции конъюнкции формируется последовательность 24 сигналов, уровень «1 которых соответствует временным интервалам, относящимся к рабочим ходам щтока. Этим выделяются временные интервалы поступления импульсов, соответствующие рабочему ходу штока
25
мом для циклического вдавливания зонда в грунт, с анкерующим механизмом, с глубиномером и с измерительным зондом, состоящим из датчиков лобового сопротивления и бокового трения грунта, отличающееся тем, , что, с целью повышения точности зондирования, оно снабжено датчиком расхода гидравлической жидкости, преобразователем импульсов, первым и втогидроцилиндра.
мом для циклического вдавливания зонда в грунт, с анкерующим механизмом, с глубиномером и с измерительным зондом, состоящим из датчиков лобового сопротивления и бокового трения грунта, отличающееся тем, , что, с целью повышения точности зондирования, оно снабжено датчиком расхода гидравлической жидкости, преобразователем импульсов, первым и втоВзаимосвязь выхода элемента И 13 с ЗО Р элементам И, делителем частоты имвходом элемента И 14 обусловливает то, что импульсы 24 являются разрещающи- ми сигналами для прохождения импульсов 25 через элемент И 14 от преобразователя Г1 импульсов, функционально
пульсов, первым и вторым регистраторами, причем выход глубиномера подключен к одному входу первого элемента И и входу делителя частоты импульсов, выход которого соединен с другим входом первого
выражающих линейное перемещение щтока з5 элемента И, выход которого соединен с гидроцилиндра. После выполнения опера-одним входом второго элемента И, другой
ции конъюнкции над последовательностями 24 и 25 на выходе элемента И формируется последовательность 26 импульсов, сопряженных только с циклами рабочего хода щтока гидроцилиндра, и таким об- разом на импульсные входы регистраторов 16 и 17 поступает в виде последовательности 26 импульсов информация о глубине пенетрации только при вдавливании пенетрационного зонда в грунт одновременно с поступлением на регистраторы 16 и 17 (иа их аналоговые входы) полезной информации от измерительных датчиков, в частности о величине лобового сопротивления грунта R и бокового трения Т.
Синхронность поступления значений измеренных величин R и Т и значений, соответствующей глубины внедрения пенетра ционного зонда обеспечивает однозначность их соответствия - однозначность их взаим- ной привязки, что обеспечивает повыщение достоверности получаемых данных о свойст- вах грунта благодаря устранению вероят- ных значений R и Т с соответствую- щей глубиной зондирования, Формула изобретения Устройство для статического зондирова- ния грунта, содержащее погружное уст- ройство с гидравлическим силовым механиз-
Ю ционного зонда обеспечивает однозначность их соответствия - однозначность их взаим- ной привязки, что обеспечивает повыщение достоверности получаемых данных о свойст- вах грунта благодаря устранению вероят- с ных значений R и Т с соответствую- щей глубиной зондирования, Формула изобретения Устройство для статического зондирова- 0 ния грунта, содержащее погружное уст- ройство с гидравлическим силовым механиз-
5
мом для циклического вдавливания зонда в грунт, с анкерующим механизмом, с глубиномером и с измерительным зондом, состоящим из датчиков лобового сопротивления и бокового трения грунта, отличающееся тем, , что, с целью повышения точности зондирования, оно снабжено датчиком расхода гидравлической жидкости, преобразователем импульсов, первым и втоО Р элементам И, делителем частоты импульсов, первым и вторым регистраторами, причем выход глубиномера подключен к одному входу первого элемента И и входу делителя частоты импульсов, выход которого соединен с другим входом первого
вход которого соединен с выходом преобразователя импульсов, вход которого соединен с датчиком расхода, выход второго элемента И соединен с одними входами регистраторов, другой вход первого регистратора соединен с датчиком лобового сопротивления грунта, а другой вход второго регистратора соединен с датчиком бокового трения грунта.
Сигналы на Выходе г/jyfuHe- мера 4Сигналы на Выводе пя частоты 15
Сигнал,/ на выходе Второго логи.- 4ec/(ozo элемента // /J
Сигналы на BtDio- Зе датчика импульсов If
Сигналы на Выходе первого чесного элемента. „И 1
| Устройство для определения несущей способности грунтов | 1981 |
|
SU988976A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Зонд для исследования морских донных грунтов | 1984 |
|
SU1247463A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
