Изобретение относится к области геофизики, а более конкретно - к устройствам измерения геофизических параметров в придонной зоне морей и океанов, и может быть использовано при оперативной оценке сейсмического состояния районов и прогноза возможных сейсмических и экологических последствий природного и техногенного характера, а также при поиске подводных залежей углеводородов.
Известные автономные донные станции [1-3] представляют собой цилиндрические или шарообразные корпусы, снабженные балластом для установки их на грунт, внутри и на корпусе которых установлены измерительные датчики и средства обработки первичной информации. В качестве измерительных датчиков используются, как правило, гидрофоны и геофоны. Зарегистрированная датчиками информация хранится на флеш-картах, которые после подъема донных станций обрабатываются на диспетчерских пунктах или считывается по каналам гидроакустической связи. Известные донные станции предназначены в основном для регистрации сейсмических сигналов на акватории моря. Так, устройство [3] представляет собой морскую автономную донную сейсмическую станцию, устанавливаемую на морское дно преимущественно с плавучих средств. Станция включает герметичный корпус, состоящий из двух полусфер, снабженных в месте сочленения уплотнительным кольцом. Внутри размещена геофизическая аппаратура, включающая измерительные датчики геофонного и гидрофонного типов, модули приема, регистрации, преобразования и хранения зарегистрированных сигналов, блоки сопряжения с бортовым модулем при всплытии, спутниковый и гидроакустический каналы связи, блок ориентации, блок синхронизации, блок управления размыкателем и блок питания. На внешней поверхности корпуса установлены гидроакустическая и спутниковая антенны, средства для поиска донной станции при всплытии, такелажные элементы и разъемы, устройство постановки на дно и обеспечения всплытия донной станции, выполненное в виде якоря-балласта.
Однако известные автономные донные станции измерения сейсмологических и гидроакустических сигналов на морском дне работают в непрерывном режиме регистрации и по причине недостаточного объема памяти и недостаточного заряда источника питания имеют ограниченный срок работы.
Известны также автономные донные станции [4-8], включающие донный сейсмометр, гидрофизический модуль, датчик магнитного поля, блок оптических измерений, средства первичной обработки и хранения информации, средства связи с диспетчерской станцией, установленные на платформе, в которых для увеличения срока работы на дне регистрация производится в старт-стопном (ждущем) режиме накопление информации. Управление накопителем производится от специального устройства, в котором непрерывно определяется средний уровень сейсмического фона за большой промежуток времени и одновременно за малый промежуток, соизмеримый со средней длительностью сигналов землетрясений. Отношение этих уровней используется как пороговое значение для включения накопителя. Поскольку такое управляющее устройство имеет инерцию, то для исключения потери начальной части сигнала применяется буферная память ограниченного объема. В случае превышения порогового значения сигнал переписывается из буфера в накопитель.
Однако такая система реагирует только на землетрясения определенной продолжительности и интенсивности. В то же время длительность сигналов землетрясений может составлять от единиц секунд (местные слабые) до единиц часов (сильные удаленные), а их интенсивность может меняться на несколько порядков. С другой стороны, такая система сильно подвержена помехам, которые приводят к ложным записям. Например, периодические сигналы от пневматической пушки, используемой при сейсморазведке, или сигналы подводной гидроакустической связи, а также импульсные помехи биологического происхождении могут полностью заполнить накопитель и привести к преждевременной разрядке источника питания.
Также недостатком известных технических решений является то, что состав включенных в них измерительных средств не позволяет решить задачу, связанную с исследованием состояния морской среды в придонной зоне при взаимодействии с тектоническими процессами, а также задачу геофизического мониторинга сложных гидротехнических сооружений. Это обусловлено рядом проблем, связанных с влиянием придонных течений на аппаратурные шумы, сцеплением сейсмических приемников с мягким дном, микросейсмическими шумами, генерируемыми гравитационными волнами и особенностями распространения сейсмических сигналов в земной коре океанического типа.
Кроме того, такой существенный недостаток известных устройств, как недостаточный объем памяти накопителя информации (зарегистрированных сигналов), не позволяет в полном объеме реализовать определение корреляционных и спектральных функций случайных процессов в режиме непрерывной регистрации микросейсм.
Выявленные недостатки также присущи и аналогичным известным устройствам, описанным в следующих источниках информации: БАШИЛОВ И.П. и др. Донные геофизические обсерватории: методы конструирования и области применения / Научное приборостроение, 2008, т.18, №2, с.86-95 [9], патент RU №2276388 C1, 10.05.2006 [10], патент RU №2377606 C2, 27.12.2009 [11], ЗУБКО Ю.Н. и др. Современные донные станции для сейсморазведки и сейсмологического мониторинга / Научное приборостроение, 2003, т.13, №4, с.70-82 [12], патент GB №2449351А, 19.11.2008 [13], патент GB №2449351 A, 19.11.2008 [14].
Известна также автономная донная станция для сейсмических исследований (патент RU №2438149 C2, 27.12.2011 [15]), техническим результатом которой является повышение достоверности прогноза аномальных явлений за счет расширения функциональных возможностей автономных донных станций.
При этом технический результат достигается за счет того, что в устройство, представляющее собой автономную донную станцию для сейсмических наблюдений, соединенную гидроакустическим каналом связи с диспетчерской станцией и состоящую из герметичного корпуса, стационарно установленного на раме, и содержащую средства регистрации геофизических сигналов, включающие донный сейсмометр, гидрофизический модуль, средства хранения информации, средства связи с диспетчерской станцией, датчик пространственной ориентации, радиобуй, балласт, размыкатель балласта, дополнительно введены аналоговые усилители и фильтры низкой частоты, удаленный цифровой регистратор и блок точного времени; кроме того, гидрофизический модуль установлен в выносном корпусе, выполненном в виде сферы, в котором также размещены центральный компьютер, накопитель на жестком диске, гидрофон, блок гидроакустического канала связи, размыкатель балласта, таймер размыкателя, проблесковый маяк, радиомаяк, разъем внешней связи, источник питания; выносной корпус закреплен с рамой посредством кабель-троса, соединенного с корпусом, установленным на раме; стационарный и выносной корпуса отстоят друг от друга на расстоянии 50-100 м.
Новые отличительные признаки, заключающиеся в том, что в устройство дополнительно введены аналоговые усилители и фильтры низкой частоты, удаленный цифровой регистратор и блок точного времени; гидрофизический модуль установлен в выносном корпусе, выполненном в виде сферы, в котором также размещены центральный компьютер, накопитель на жестком диске, гидрофон, блок гидроакустического канала связи, размыкатель балласта, таймер размыкателя, проблесковый маяк, радиомаяк, разъем внешней связи, источник питания; выносной корпус закреплен с рамой посредством кабель-троса, соединенного с корпусом, установленным на раме; стационарный и выносной корпуса отстоят друг от друга на расстоянии 50-100 м, позволяют решить техническую задачу не только оперативной оценки сейсмического состояния исследуемых районов, но и задачу оперативной оценки гидродинамического состояния на границе вода-грунт, обусловленную влиянием окружающей среды под воздействием процессов природного и техногенного характера.
Для уменьшения помех от придонных течений станция выполнена из двух прочных сферических корпусов, разнесенных в пространстве. Один корпус (диаметром 450 мм) с блоком сейсмических датчиков лежит на дне, второй корпус (диаметром 650 мм) с регистрирующей аппаратурой, источником питания, каналом гидроакустической связи и вспомогательными устройствами находится в плавучем состоянии над дном. Корпуса соединены электрически и механически прочным кабель-тросом длиной от 50 до 100 м.
Однако такая конструкция (наличие двух корпусов, кабель-троса, рамы) не исключает влияния придонных течений на конструктивные элементы автономной донной станции, а соответственно и появление посторонних акустических шумов, что снижает достоверность регистрации сейсмических сигналов.
Общим недостатком известных устройств является то, что, несмотря на сложность конструкций донных сейсмических станций, эффективность их сравнительно невелика. Для повышения эффективности донных сейсмических станций при геофизических исследованиях в районах со сложной топографией морского дна выполняют построение бесшовного сейсмического разреза на базе мобильного сейсмического комплекса, содержащего до 200 донных сейсмических станций (www.seismoshelf.com [16]), включающих герметичный корпус, выполненный в виде сферы диаметром 260 мм с тремя геофонами (X, Y, Z) с диапазоном регистрируемых частот 10-250 Гц и гидрофоном с диапазоном регистрируемых частот 10-200 Гц, а также акустический трансивер, всплывающий сигнальный буй, бетонный якорь, линь крепления якоря, электрохимический размыкатель.
Одной из главных проблем при измерениях на морском дне также является выставление сейсмометров относительно вертикальной и горизонтальных осей. При этом необходимо учитывать ограниченные углы наклонов сейсмометров, при которых они еще сохраняют работоспособность в районах со сложной топографией морского дна.
Кроме того, в известных устройствах при передаче кодовых сообщений при передаче информации по акустическому каналу связи используют методы со скачкообразной перестройкой частоты (Прокис Джон. Цифровая связь. М.: Радио связь, 2000 г. - с.628-629 [17]), т.е. методы многоуровневой частотной манипуляции (MFSK, т.е. M-ary frequency keying). Приемные устройства таких систем состоят из многоканальных приемников, настроенных на различные частоты. Это приводит к значительному усложнению аппаратуры связи.
Кроме того, морская среда, в которой распространяются гидроакустические сигналы, характеризуется значительной пространственно-временной изменчивостью, обуславливающей особый характер процессов передачи акустических волн. Особенность распространения сигналов в море проявляется в виде изменений амплитуды, фазы, времени и углов прихода и других параметров гидроакустического поля в точке приема. Одним из наиболее неприятных явлений, имеющих место при распространении сигналов, является реверберация и многолучевость, проявляющаяся в конечном счете в виде мультипликативной помехи, приводящая к замираниям. Такая помеха в общем случае может значительно снижать достоверность приема сообщений.
Задачей заявляемого технического решения является повышение достоверности регистрации микросейсмических колебаний на дне моря при исследовании характеристик микросейсмического волнового поля верхней части разреза земной коры морского дна в шельфовых и транзитных зонах.
Поставленная задача решается за счет того, что малогабаритный донный сейсмический модуль, соединенный гидроакустическим каналом связи с диспетчерской станцией и состоящий из герметичного корпуса, гидрофизического модуля, устройства регистрации геофизических сигналов, включающего сейсмический датчик, накопитель на жестоком диске, блок пространственной ориентации, балласт, размыкатель балласта, таймер размыкателя, проблесковый маяк, радиомаяк, разъем внешней связи, источник питания, в котором в отличие от прототипа [15, 16] герметичный корпус выполнен в виде полусферы, сочлененной с основанием герметичного корпуса, выполненным в виде тарелки, по верхнему диаметру которой установлены механические элементы размыкателя балласта, выполненные в виде строп, которые сочленены с балластом, плотно прилегающим к основанию герметичного корпуса по его нижнему диаметру, средство связи с диспетчерской станцией выполнено в виде однорелейного гидроакустического канала связи, при этом блок пространственной ориентации состоит из электронного 3D компаса, трех акселерометров и трех измерителей угловых скоростей, жестко сочлененных с сейсмическим датчиком, а сейсмический датчик выполнен в виде широкополосного молекулярно-электронного датчика.
В донном сейсмическом модуле применены молекулярно-электронные датчики, сохраняющие работоспособность при произвольных углах наклона, совместно с электронным 3D компасом, непрерывно контролирующим положение осей сейсмодатчиков в пространстве и позволяющим вычислять значения компонент XYZ сейсмосигнала в любой момент времени и при любом положении модуля на морском дне. Определение углов наклона сейсмического модуля осуществляется с помощью трех акселерометров и трех измерителей угловых скоростей.
Сущность технического решения поясняется чертежами (фиг.1, 2, 3).
Фиг.1. Блок-схема донного сейсмического модуля.
Блок-схема включает герметичный полусферический корпус 1, балласт 2, стропы 3. В герметичном полусферическом корпусе 1 размещены центральный микропроцессор 4, накопитель на жестком диске 5, гидрофон 6, блок гидроакустического канала связи 7, размыкатель балласта 8, таймер размыкателя 9, проблесковый маяк 10, разъем внешней связи 11, источник питания 12, гидрофизический модуль 13, радиомаяк 14. В герметичном полусферическом корпусе 1 также установлены трехкомпонентный сейсмический датчик 15, выполненный в виде широкополосного молекулярно-электронного датчика, аналоговые усилители 16, фильтры низкой частоты 17, цифровой регистратор 18, блок хранения точного времени 19, блок пространственной ориентации 20. На верхней плоскости герметичного полусферического корпуса 1 установлена антенна 21 гидроакустического канала связи.
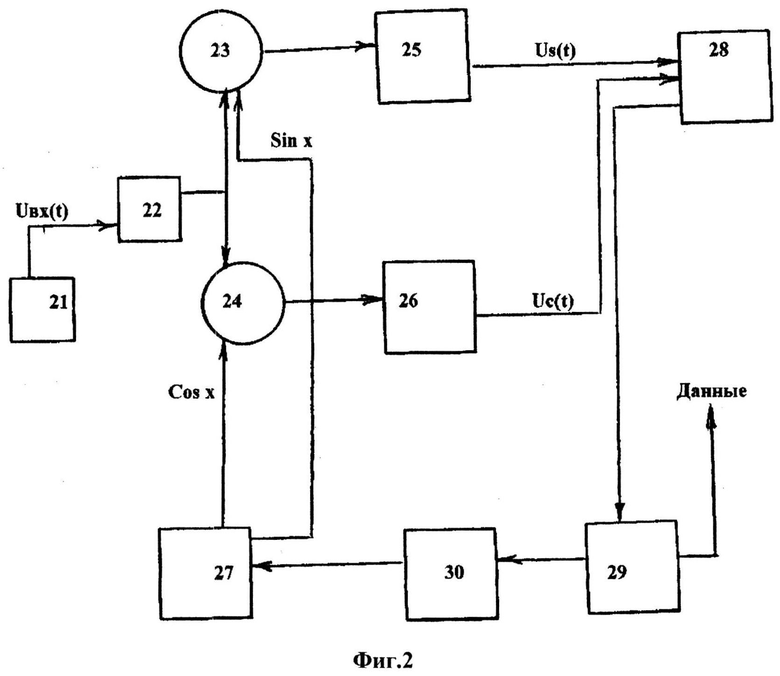
Фиг.2. Функциональная схема приемного устройства гидроакустического канала связи включает гидроакустическую антенну 21, усилитель-ограничитель 22, предназначенный для усиления и нормирования сигнала, поступающего на вход приемника с гидроакустической антенны 21, схему квадратурного детектирования и фильтрации, состоящую из двух перемножителей 23 и 24, фильтров низкой частоты (ФНЧ) 25 и ФНЧ 26, генератора переменной частоты (ГЕН) 27 и схемы 28 принятия решения о наличии полезного сигнала на входе приемника, декодер 29 гидроакустической цифровой информации, схему управления 30 частотой генератора 27.
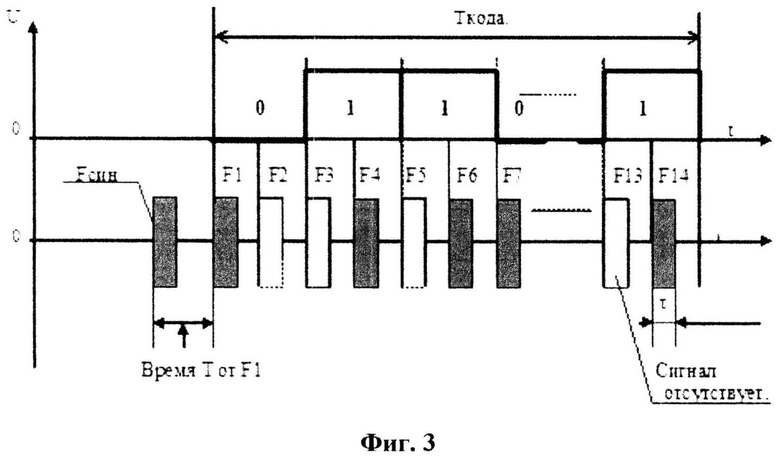
Фиг.3. Пример формирования кодовой посылки, состоящей из семи разрядов.
Выполнение герметичного корпуса 1 в виде полусферы, жестко сочлененной с основанием герметичного корпуса, выполненным в виде тарелки, по верхнему диаметру которой установлены механические элементы размыкателя балласта, выполненные в виде строп, которые сочленены с балластом, плотно прилегающим к основанию герметичного корпуса по его нижнему диаметру, позволяет исключить влияние на качество регистрации сейсмических сигналов придонных течений. Постановка донного сейсмического модуля на дно производится в свободном падении путем сбрасывания за борт с обеспечивающего судна. Подъем донного сейсмического модуля производится следующим образом. По гидроакустическому сигналу от судна, принимаемому через гидроакустическую антенну блока гидроакустического канала связи 7, срабатывает размыкатель балласта 8, стропы 3 отсоединяются от герметичного корпуса и донный сейсмический модуль всплывает. Поиск донного сейсмического модуля на поверхности производится с помощью проблескового маяка 10 (в ночное время).
Сейсмический датчик 15 предназначен для обеспечения непрерывного сейсмического мониторинга морского дна в широком частотном и динамическом диапазонах и представляет собой молекулярно-электронный датчик.
Сейсмический датчик 15 регистрирует три компоненты сейсмического поля: две горизонтальные и одну вертикальную, и предназначены для преобразования скорости колебания грунта в электрический сигнал в соответствующем динамическом и частотном диапазоне. Основные технические характеристики датчика: количество сейсмоакустических каналов 3, рабочий диапазон регистрируемых частот 0,3-40 Гц, разрядность аналого-цифрового преобразователя 24 бит, RMS шум 112 дБ при частоте опроса 100 Гц. Суммарная емкость внутреннего накопителя данных 4 Гб.
Блок пространственной ориентации 20 предназначен для определения точного положения в пространстве донного сейсмического модуля и содержит электронный 3D компас, три акселерометра, три измерителя угловых скоростей, четыре фильтра высоких частот (ФВЧ), один фильтр низких частот (ФНЧ), блок оценки угловых перемещений, блок оценки медленно меняющихся углов и сумматор, два интегратора и вычислительный блок.
Применение в донном сейсмическом модуле молекулярно-электронного датчика, сохраняющего работоспособность при произвольных углах наклона, совместно с электронным 3D компасом, непрерывно контролирующим положение осей сейсмодатчика в пространстве и позволяющим вычислять значения компонент XYZ сейсмосигнала в любой момент времени и при любом положении модуля на морском дне.
Определение углов наклона донного сейсмического модуля осуществляется с помощью трех акселерометров и трех измерителей угловых скоростей.
Измерители угловых скоростей и акселерометры жестко привязаны к сейсмическому датчику 15, что позволяет по их показаниям оценивать положение и ориентацию в пространстве донного сейсмического модуля. С измерителей угловых скоростей в первый ФВЧ поступают сигналы, пропорциональные угловым скоростям донного сейсмического модуля вокруг трех осей подвижной системы координат, привязанной к донному сейсмическому модулю. В первом ФВЧ осуществляется подавление низкочастотных компонент оценок угловых скоростей, которые могут вызвать существенную ошибку при оценивании угловых перемещений в блоке оценки угловых перемещений. В блоке оценки угловых перемещений оцениваются угловые перемещения донного сейсмического модуля в неподвижной системе координат, привязанной к Земле. Для этого сначала оцениваются угловые перемещения донного сейсмического модуля в подвижной системе координат, привязанной к ней. При этом учитывается, что угловая скорость является производной от углового перемещения по времени. Переход от подвижной системы координат к неподвижной осуществляется с помощью известной формулы поворота осей координат. При замене системы OXYZ новой системой OX'Y'Z' с тем же началом старые координаты точки выражаются через новые формулы
где 

На выходе блока оценки угловых перемещений отсутствует информация о медленно меняющихся углах наклона донного сейсмического модуля. Ее можно получить, оценивая направление ускорения свободного падения. Для этого сигналы с акселерометров подвергают низкочастотной фильтрации в ФНЧ, в результате которой подавляются составляющие ускорения, обусловленные относительно быстрыми перемещениями донного сейсмического модуля, обусловленные влиянием подводных течений, а компоненты, связанные с притяжением Земли, остаются. По соотношению проекций ускорения свободного падения на оси акселерометров в блоке оценки медленно меняющихся углов наклона оцениваются медленно меняющиеся углы наклона. В сумматоре суммируются оцененные быстро и медленно меняющиеся углы наклона донного сейсмического модуля, что позволяет судить об изменении углов в продольной и поперечной плоскостях.
В блоке оценки вертикальной проекции ускорения на основании данных с акселерометров и оценок углов наклона с сумматора вычисляется вертикальная проекция ускорения. Затем последовательным фильтрованием во втором ФВЧ, первым интегрированием в интеграторе, фильтрованием в третьем ФВЧ, вторым интегрированием в интеграторе и фильтрованием в четвертом ФВЧ выполняется подавление низкочастотных составляющих и двойное интегрирование. Интегрирование нужно выполнять для оценивания вертикального перемещения, так как ускорение - это вторая производная от перемещения по времени. Второй и третий ФВЧ нужны, чтобы после интеграторов ошибка акселерометров не увеличивалась катастрофически из-за очень большого усиления интегратором низкочастотных сигналов. Четвертый ФВЧ должен обладать слабыми фильтрующими свойствами, его назначение в устранении накопления ошибок, связанных с квантованием в аналого-цифровых и цифровых устройствах.
Составные части блока пространственной ориентации 20 выполнены программно, например, на распределенном вычислительном устройстве, в которое входят быстродействующее ВУ на базе микроконтроллера и ВУ на базе ЭВМ.
Разъем внешней связи 11 обеспечивает связь при подключении внешних устройств при всплытии донного сейсмического модуля.
Гидрофизический модуль 13 предназначен для выполнения измерений следующих величин:
- температура,
- давление,
- электропроводимость,
- вектор скорости течения (трехосный акустический измеритель течений).
Диспетчерские станции выполнены в виде береговых сооружений или плавучих средств (плавучие, стационарные и заякоренные платформы, суда).
Средства диспетчерской станции включают в себя:
- персональный компьютер, совместимый с IBM PC,
- приемник спутниковой навигационной системы GPS,
- блок автономного гидроакустического размыкателя,
- аппаратуру гидроакустического телеуправления.
Минимальная конфигурация персонального компьютера включает:
- процессор - Pentium 166 МГц,
- ОЗУ - 32 Мбайт,
- плату SVGA с памятью 1 Мбайт,
- дополнительную плату с двумя последовательными портами с FIFO памятью (UART 16550-совместимая).
Они используются для обработки информации, полученной с сейсмических донных модулей.
Программно-математическое обеспечение средств диспетчерской станции предназначено для проверки всех измерительных каналов донных сейсмических модулей через последовательный порт RS-485, привязки к системе единого времени внутренних часов, осуществления привязки к географическим координатам посредством аппаратуры гидроакустического канала связи 7, получения информации о результатах тестовых проверок после установки донных сейсмических модулей на дно.
Алгоритм основного режима работы диспетчерской станции заключается в обеспечении связи между донными сейсмическими модулями и диспетчерской станцией, осуществляемой через гидроакустический канал связи по методу доступа с временным разделением абонентов. Каждый донный сейсмический модуль имеет свой адрес. В этом случае сеть диспетчерских станций работает в симплексном режиме. Количество измерительных каналов в каждом донном сейсмическом модуле зависит от решаемой задачи в конкретном месте постановки. В принципе максимальное количество цифровых измерительных каналов может быть до 30, а аналоговых до 6.
Управляющий компьютер диспетчерской станции и программно-математическое обеспечение реального времени предназначены для управления оборудованием донного сейсмического модуля, диагностирования его неисправностей, приема данных и размещения получаемых данных на устройствах накопления информации. Функционирование всего аппаратно-программного комплекса определяется файлом конфигурации, который создается специальной программой и задается наличием установленных донных сейсмических модулей, типом используемых геофизических каналов, параметрами каналов, а также наличием или отсутствием аппаратуры синхронизации времени.
При запуске программы регистрации считывается конфигурация всего донного сейсмического модуля и производится привязка времени по Гринвичу с точностью до нескольких десятков микросекунд и расчет поправок к частоте кварца компьютера для поддержания функционирования донного сейсмического модуля. Вслед за синхронизацией происходит опрос, программирование, синхронизация и запуск оборудования отдельных донных сейсмических модулей. Запрашивается состояние оборудования каждого донного сейсмического модуля (его исправность, наличие каналов, исправность каналов и т.д.). В случае возникших проблем на экран выдается соответствующее сообщение (оно также записывается в файл протокола функционирования). На донный сейсмический модуль передается программа работы для каждого измерительного канала, частота опроса и коэффициент усиления.
Перед запуском каждый цифровой регистратор 18 синхронизируется по времени компьютера диспетчерской станции (в дальнейшем синхронизация проводится каждые 10 с). При синхронизации учитывается время прохождения сигнала от компьютера диспетчерской станции до синхронизируемого блока регистрации. После этого блок регистрации запускается и начинает сбор данных с измерительных каналов. Блок регистрации в каждого донного сейсмического модуля работает независимо и всю информацию сжимает и складывает в буферную память.
Управляющий компьютер диспетчерской станции циклически запрашивает у соответствующего блока регистрации данные о зарегистрированных датчиками сигналах и в случае их наличия принимает их и записывает в свои буфера в оперативной памяти. После накопления достаточного количества данных для канала они переписываются в файл, соответствующий типу канала. Обычно эти файлы расположены на другом компьютере и доступны по локальной сети, хотя для кратковременных экспериментов система может быть сконфигурирована таким образом, что будет использоваться локальный диск. При кратковременных разрывах связи (до 10 мин) данные не теряются в силу наличия у каждого блока регистрации достаточно большого собственного буфера. В процессе обмена данными оператором может быть проведена калибровка любого измерительного канала, входящего в состав сети диспетчерской станции.
При возникновении нештатных ситуаций (разрыв связи с донным сейсмическим модулем, его поломка, отказ отдельных каналов либо восстановление вышеперечисленного), а также некоторых штатных ситуаций (возникновение события или запуск калибровки соответствующего измерительного канала) выдается сообщение на экран, включающее время по Гринвичу наступления ситуации, имя донного сейсмического модуля и канала, а также само сообщение. Сообщения записываются в буфер размером 100 строк и в файл протокола. Буфер может быть просмотрен оператором в любое время.
Измерительные датчики после постановки на дно донного сейсмического модуля функционируют по прямому назначению.
Зарегистрированные датчиками сигналы записываются на средства хранения информации (накопитель на жестком диске 5), при сеансах связи передаются на диспетчерскую станцию, где выполняется полный анализ оценки сейсмического и гидродинамического состояния исследуемых районов, по результатам которого строят спектры микросейсмического волнового поля верхней части разреза земной коры морского дна в шельфовых и транзитных зонах, относительный скоростной разрез для морского дна, выполняют геологическую интерпретацию полученных разрезов.
Сбор, оцифровка и накопление сигналов широкополосных сейсмических датчиков осуществляется посредством программно-аппаратного комплекса для Intel-совместимого семейства процессоров и снабжена средствами отладки, тестирования и визуализации. Предусмотрены три режима регистрации сигналов: непрерывный, старт-стопный по заданной программе и старт-стопный с управлением по уровню сигнала. Управление параметрами системы производится по результатам экспресс-обработки сигналов на основе анализа уровня энергии и спектрального состава с помощью быстрых алгоритмов реального времени.
Аппаратная часть подсистемы сбора и регистрации данных состоит из следующих основных элементов: цифрового регистратора 18, блока хранения точного времени 19, центрального микропроцессора станции 4 с накопителем на жестком магнитном диске 5.
Цифровой регистратор 18 представляет собой микромодульный контроллер на базе Intel-совместимого процессора NEC V25 с PCMCIA флэш-накопителем и стандартным выходным средством коммуникации на основе интерфейса RS232. Микроконтроллер содержит встроенный многоканальный АЦП с последовательным интерфейсом, программируемые таймеры, часы реального времени, порты цифрового ввода-вывода, внешние каналы аппаратного прерывания и канал прямого доступа к памяти. Отличительными особенностями используемого контроллера являются миниатюрные размеры (100×70×30 мм), малое потребление (0,5 Вт), высокая надежность и низкая стоимость.
Блок хранения точного времени 19 сконструирован с использованием энергосберегающих технологий полностью на КМОП-элементах. Используется как генератор эталонных минутных (секундных) меток для синхронизации часов микроконтроллера центрального микропроцессора 4.
Центральный микропроцессор 4 собран на базе PC-совместимого оборудования для автоматизации промышленности с использованием процессорной платы типа MicroPC фирмы Octagon Sistems (США). Примененная конструкция отвечает жестким требованиям промышленной эксплуатации, в частности она способна выдерживать большие перегрузки при ударах и имеет повышенную наработку на отказ. Сохранив вычислительную мощность современного персонального компьютера, он имеет малые габариты, вес и энергопотребление (несколько единиц ватт). При этом, что особенно важно для герметичной донной станции, не требует дополнительного охлаждения (вентилятора). Наличие 16-разрядного IDE интерфейса для накопителя на жестком магнитном диске 5 позволяет применять современные накопители повышенной емкости и, соответственно, увеличить время автономной работы станции, используя режим непрерывной регистрации. Система регистрации в целом оказывается полностью совместимой с PC и работает под управлением ROM-DOS (DOS 6.22).
Для расширения динамического диапазона регистрируемых сигналов под каждую регистрируемую компоненту отводится два канала усиления, чувствительный и грубый, с соотношением коэффициентов усиления K1/K2=2n, где n выбирается из уровня реального сейсмического фона в месте установки станции. Таким образом, удается довести динамический диапазон станции в условиях малых помех до 130 дБ с использованием недорогого и надежного 12-разрядного АЦП. Служба точного времени реализована на основе периодической синхронизации внутренних часов микроконтроллера ПЦР эталонными минутными метками от блока хранения точного времени 19.
Так как, данные регистров часов реального времени микроконтроллера могут обновляться с некоторой задержкой, то для достижения требуемой точности службы времени используются секундные метки блока хранения точного времени 19 или смесь секундных и минутных меток, которые вводятся через один из цифровых входов микроконтроллера в такт с частотой преобразования аналогового сигнала и записываются в младший бит слова АЦП. Таким образом, оцифрованные данные содержат бит пилот-сигнала, фронт которого оказывается привязанным к фронту эталонной метки с точностью не хуже одного отсчета.
Основное время центральный микропроцессор 4 находится в режиме "Sleep" и включается только на время переписи данных с флэш-карты на жесткий диск и для выполнения контрольных функций по обслуживанию станции. Использование режима "Sleep" позволяет резко снизить энергетические затраты в целом.
Программное обеспечение донного сейсмического модуля целиком написано на языке высокого уровня Си, который вместе с тем позволяет производить тонкое управление аппаратными средствами вплоть до побитовых операций в их регистрах, характерных для ассемблера. Применение компиляторов языка Си фирмы Borland путем соответствующей настройки среды компилятора позволяет генерировать коды, в значительной степени инвариантные к типу и классу используемого IBM-совместимого компьютера. В результате программа оказывается работоспособной для всех типов процессоров, начиная с семейства 8086/8088 и кончая 80486 и Pentium.
Версия программы размещается в EPROM микроконтроллера. Запуск программы на исполнение и, соответственно, начало работы происходят автоматически при подаче питания на микроконтроллер.
Оцифровка сейсмических сигналов происходит с использованием механизма внешних прерываний сигналами программируемого внутреннего таймера микроконтроллера. Оцифровка и сбор данных осуществляются с элементами предварительной обработки для улучшения метрологических характеристик каналов регистрации.
Аналоговые сигналы цифруются (аналоговые усилители 16) на более высокой частоте, затем подвергаются цифровой фильтрации и осреднению "тройками" и "пятерками" с последующей разрядкой до получения требуемой частоты выборок. Все процедуры фильтрации в системе выполняются в реальном времени с помощью быстрых рекурсивных фильтров Баттерворта. Применяются два вида фильтров 17. В характерных точках программы с высокой скоростью канализации данных (например, при входной фильтрации) целесообразно использовать рекурсивные фильтры с целочисленными коэффициентами. Такие фильтры не требуют вычислений с плавающей запятой и оказываются значительно быстрее своих аналогов с "точными" коэффициентами. Однако следует учитывать, что процедура округления коэффициентов вызывает ряд известных проблем и, в частности, может привести к неустойчивости фильтра. В других характерных узлах программы, где цифровой фильтрации подлежат отсчеты с частотой дискретизации 100 Гц и ниже, оказывается возможным применять рекурсивные фильтры с "точными" коэффициентами, представленными в виде чисел с плавающей запятой. Такие фильтры более устойчивы, функционально ближе к своему аналоговому прототипу, но проигрывают в быстродействии. Рекурсивные фильтры подобного типа используются, в частности, в алгоритме детектора сейсмических сигналов. Обычно в аналоговых и цифровых устройствах лучший результат дают фильтры Баттерворта высокого порядка, полученные путем каскадного соединения звеньев второго порядка.
С целью увеличения времени автономности станции, кроме непрерывного режима работы, предусмотрен также ждущий режим регистрации с краткой записью предыстории события. Для организации ждущего режима в системе используется наиболее часто применяемый для целей обнаружения сейсмических сигналов так называемый STA/LTA-детектор, использующий алгоритм отношения энергий сигналов с короткопериодным и долгопериодным усреднением. Недостатком такого детектора, как известно, является пропуск первого вступления при работе по сильнокогерентному сигналу.
Для улучшения характеристик детектора разработана трехканальная версия с использованием признака группового совпадения "2 из 3-х". Это означает, что данные трех сейсмических каналов анализируются тремя независимыми детекторами, а сигнал обнаружения вырабатывается только при совпадении сигналов тревоги, по крайней мере, в двух каналах из трех. Такой метод повышает надежность работы системы в ждущем режиме. В случае обнаружения события в системе вырабатывается сигнал, разрешающий сохранить предыдущий файл данных во внешней памяти, в противном случае он стирается. Таким образом, осуществляется ждущий режим регистрации с записью фона перед событием. Программа цифрового регистратора 18 содержит телекоммуникационный драйвер, который поддерживает полудуплексный режим связи с центральным компьютером донной станции. Связь осуществляется на основе оригинального высокопроизводительного бинарного протокола обмена с использованием отдельных сигналов интерфейса RS232. Управление связью и накоплением данных осуществляет центральный микропроцессор 4. Программа управления поддерживает файловую организацию, принятую в DOS. Массивы данных сохраняются на жестком диске в файлах, формат которых удовлетворяет принятым стандартным требованиям, и при необходимости с помощью простейшего программного супервизора формата могут быть интегрированы в любой из существующих в мировой практике форматов обмена сейсмологическими данными.
Управление работой всей станции производится с помощью центрального микропроцессора типа MicroPC, а основное накопление сигналов осуществляется на жестком диске. Все это позволило расширить частотный диапазон цифрового регистратора до 15 Гц сверху, динамический диапазон до 120 дБ (с автоматическим переключением чувствительности на 2 поддиапазона) и полностью исключить аналоговую регистрацию.
При регистрации сейсмических сигналов на дне одним из важных направлений использования широкополосных донных сейсмографов является исследование микросейсмических шумов, возбуждаемых морскими и океаническими волнами. Микросейсмы проявляются в широком диапазоне частот и служат естественным фоном, который определяет порог чувствительности сейсмографов. Посредством предлагаемого устройства также выполняется регистрация характерных микросейсм с периодом около 6 секунд, а также выявляются микросейсмы с периодами 20 и 100 секунд, что позволяет выделить как объемные P и S волны, так и поверхностные волны Лява (колебания в диапазоне частот 0,0125-0,05 Гц) и Релея.
В известных устройствах передачи кодовых сообщений при передаче информации часто используются методы со скачкообразной перестройкой частоты (Прокис Джон. Цифровая связь. М.: Радио связь, 2000 г., с.628-629 [16]), т.е. методы многоуровневой частотной манипуляции (MFSK, т.е. M-ary frequency keying). Приемные устройства таких систем состоят из многоканальных приемников, настроенных на различные частоты. Это приводит к значительному усложнению аппаратуры связи.
Кроме того, морская среда, в которой распространяются гидроакустические сигналы, характеризуется значительной пространственно-временной изменчивостью, обуславливающей особый характер процессов передачи акустических волн. Особенность распространения сигналов в море проявляется в виде изменений амплитуды, фазы, времени и углов прихода и других параметров гидроакустического поля в точке приема. Одним из наиболее неприятных явлений, имеющих место при распространении сигналов, является реверберация и многолучевость, проявляющаяся в конечном счете в виде мультипликативной помехи, приводящая к замираниям. Такая помеха в общем случае может значительно снижать достоверность приема сообщений.
Так, например, для глубины 6000 м, длительности сигнала 10 мс, мощности излучения 100 Вт, коэффициенте концентрации антенны - 2 и при наихудших условиях объемная реверберация уменьшается до уровня 1% за время порядка 1 с. Одним из способов, позволяющим эффективно бороться с ухудшением характеристик, вызванным замиранием, является применение сигналов переносчиков с расширением в спектральной и временной области. В частности в радиосистемах передачи информации часто используются методы со скачкообразной перестройкой частоты [17], т.е. методы многоуровневой частотной манипуляции (MFSK, т.е. М-ary frequency keying). Приемные устройства таких систем состоят из многоканальных приемников, настроенных на различные частоты. Это приводит к значительному усложнению аппаратуры связи.
При реализации предлагаемого донного сейсмического модуля разработано приемное устройство, основанное на способе модуляции сигналов, позволяющее применять только один канал приема цифровой информации для всех рабочих частот, что значительно упрощает приемное устройство, а также обеспечивает повышенную помехоустойчивость при передачи гидроакустических сигналов в условиях мультипликативных помех.
При этом передача кодовых сообщений по гидроакустическому каналу связи передается на различных частотах путем формирования синхроимпульса и разрядов кода логический «0» и логическая «1», в котором передачу кодовых сообщений выполняют по одному гидроакустическому каналу связи, при этом передают импульсы, соответствующие одному разряду, разделенные во времени.
Пример формирования кодовой посылки, состоящей из семи разрядов, приведен на фиг.3.
Функциональная схема приемного устройства (фиг.3) состоит из следующих основных узлов:
- усилителя-ограничителя 22, предназначенного для усиления и нормирования сигнала, поступающего на вход приемника с антенны;
- схемы квадратурного детектирования и фильтрации, состоящей из двух перемножителей 23 и 24, фильтров низкой частоты (ФНЧ) 25 и ФНЧ 26, генератора переменной частоты (ГЕН) 27 и схемы 28 принятия решения о наличии полезного сигнала на входе приемника;
- декодера 29 гидроакустической цифровой информации;
- схемы управления 30 частотой генератора ГЕН.
Принцип модуляции сигналов-переносчиков, т.е. сигналов, которые используются для передачи цифровой информации по гидроакустическому каналу связи, следующий.
Каждому двоичному разряду цифровых данных поставлен в соответствии сигнал, представляющий собой прямоугольный импульс длительностью, заполненный своей, отличной от других, несущей частотой. Причем логическому "0" присваиваются свои частоты, логической "1" свои. Таким образом, цифровая информация передается различными частотами. Способ формирования сигналов, на примере семиразрядного двоичного кода, поясняется фиг.3. Здесь семиразрядное слово передается 14 различными частотами от F1 до F14. Вначале передачи формируется синхроимпульс Fсин. Теперь можно условно присвоить нечетные номера частот логическому 0, а четные номера - логической единице. Тогда если первый разряд кода 0, то формируется F1, если 1, то F2; если второй разряд 0, то формируется F3, если 1, то F4 и т.д. и, наконец, если седьмой разряд 0, то формируется F13, если 1, то F14. Для того чтобы при приеме данных не использовать два канала приемника, канала нулей и канала единиц, можно передавать импульсы, соответствующие одному разряду, разделенные во времени. Рассмотрим первый разряд, если его значение было 0, то через время Т от начала синхросигнала Fсин. формируется импульс с частотой F1, если значение разряда было 1, то импульс с частотой F2 формируется не на том временном участке, где формировался импульс с частотой F1, а позже. Место, где должен быть импульс с частотой F1, остается свободным. Такой же способ модуляции используется и для последующих разрядов.
Пример формирования посылки приведен на фиг.3.
Такой принцип модуляции сигналов переносчиков с одновременным использованием помехоустойчивого кодирования позволяет практически полностью исключить влияние реверберации и многолучевости распространения сигналов на качество приема информации и значительно упростить приемный тракт. На фиг.2 представлена функциональная схема приемного устройства.
Приемник выполнен по схеме оптимального квадратурного обнаружителя радиоимпульса со случайной фазой, который позволяет максимизировать отношение сигнал/шум и тем самым улучшить качество приема, повышая точность измерения дальности.
В отсутствии полезного сигнала приемник находится в дежурном режиме. На входы перемножителей 23 и 24 с генератора ГЕН 27 поступают непрерывные опорные напряжения Uоп с частотой Fсин, равной частоте заполнения импульса синхронизаци, сдвинутые по фазе относительно друг друга на 90 градусов. Полоса пропускания ФНЧ 25 и 26 выбирается квазиоптимальной. Схема принятия решения 28 постоянно анализирует, по заданному алгоритму, выходные напряжения ФНЧ 25 и ФНЧ 26 us(t) и uc(t) соответственно. После прихода импульса синхронизаци с частотой Fсин величины напряжений us(t) и uc(t) будут удовлетворять заданному критерию принятия решения. Схема сообщит об этом декодеру 29, подав на его вход импульс, фронт которого соответствует моменту появления полезного сигнала на входе приемника. Декодер 29, зафиксировав появление этого импульса, дает команду схеме управления 30 выключить Uоп. На входы перемножителей 23 и 24 поступает напряжение, равное 0, и прием не производится. Через время Т после приема первого импульса декодер дает команду схеме управления 30 включить опорные напряжения Uоп с частотой, равной частоте заполнения первого импульса информационного сигнала F1, которая соответствует логическому нулю первого разряда. Если сигнал с частотой F1 был принят, то декодер 29 принимает решение, чтобы принять ноль, и переключает частоту опорного напряжения для приема сигнала с частотой F3, соответствующей логическому нулю второго разряда команды. Если же сигнал с частотой F1 принят не был, то декодер 29 переключает частоту опорного напряжения для приема сигнала с частотой F2, соответствующей логической единице первого разряда, и, приняв его, принимает решение, что была принята единица. После этого декодер 29 дает команду схеме управления 30 переключить частоту Uоп для приема второго разряда также, как и после приема логического нуля первого разряда. Эта процедура повторяется для каждого из семи разрядов команды, при которой частота опорного напряжения Uоп может меняться от F1 до F14. Пауза между приемом импульсов команды, т.е. когда опорное напряжение на перемножители 23,24 не подается, равна Тсек или 2Т в зависимости от того, какое логическое значение было присвоено каждому из разрядов. Если информационное слово было принято полностью, то декодер 29 идентифицирует его и посылает в буфер данных. Затем декодер 29 снова переключает ГЕН 27 для приема синхроимпульса Fсин и прием информационных слов продолжается по вышеописанному алгоритму. Количество частот и время Ткод выбирается большим, чем время корреляции замирания сигналов.
Такой принцип модуляции сигналов переносчиков с одновременным использованием помехоустойчивого кодирования позволяет практически полностью исключить влияние реверберации и многолучевости распространения сигналов на качество приема информации и значительно упростить приемный тракт.
При использовании предлагаемого технического решения, в отличие от прототипа и аналогов, определяют характеристики микросейсмического поля верхней части разреза земной коры морского дна в шельфовых и транзитных зонах.
Регистрацию вертикальной составляющей компоненты микросейсмического поля выполняют в диапазоне 0.3-40 Гц на длине профиля до 1000 м с интервалом 100 м.
Выполняют построение относительного скоростного разреза. Выполняют геологическую интерпретацию разрезов и построение спектров микросейсмического волнового поля верхней части разреза земной коры на морском дне.
Реализация устройства технической сложности не представляет, так как устройство реализовано на серийно выпускаемых датчиках и элементах микроэлектроники.
Источники информации
1. RU №2270464, 20.02.2006.
2. RU №2276388, 10.05.2006.
3. RU №2294000, 20.02.2007.
4. EP №0519031, 23.12.1992.
5. NO №911639, 26.10.1992.
6. EP №0516662, 09.12.1992.
7. Смирнов Г.В., Еремеев В.И., Агеев М.Д. и др. Океанология: средства и методы океанологических исследований. - М.: Наука, 2005.
8. AU 2002100749, 13.03.2003.
9. Башилов И.П. и др. Донные геофизические обсерватории: методы конструирования и области применения / Научное приборостроение, 2008, т.18, №2, с.86-95.
10. RU №2276388 C1, 10.05.2006.
11. RU №2377606 C2, 27.12.2009.
12. Зубко Ю.Н. и др. Современные донные станции для сейсморазведки и сейсмологического мониторинга / Научное приборостроение, 2003, т.13, №4, с.70-82.
13. GB №2449351 A, 19.11.2008.
14. GB №2449351 A, 19.11.2008.
15. RU №2438149 C2, 27.12.2011.
16. www.seismoshelf.com.
17. Прокис Джон. Цифровая связь. М.: Радио связь, 2000 г., с.628-629.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2014 |
|
RU2554283C1 |
| АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2010 |
|
RU2438149C2 |
| ПОДВОДНАЯ ГЕОФИЗИЧЕСКАЯ СТАНЦИЯ | 2010 |
|
RU2435180C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2447466C2 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2011 |
|
RU2468395C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2449325C1 |
| ЗАЯКОРЕННАЯ ПРОФИЛИРУЮЩАЯ ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2014 |
|
RU2545159C1 |
| Заякоренная профилирующая подводная обсерватория | 2015 |
|
RU2617525C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2013 |
|
RU2546784C2 |
| ДОННАЯ СТАНЦИЯ | 2012 |
|
RU2484504C1 |
Изобретение относится к устройствам для измерения геофизических параметров в придонной зоне морей и океанов. Сущность: сейсмический модуль состоит из герметичного корпуса (1), внутри которого размещены накопитель (5) на жестком диске, блок (7) гидроакустического канала связи, размыкатель (8) балласта (2), таймер (9) размыкателя (8) балласта (2), проблесковый маяк (10), разъем (11) внешней связи, источник (12) питания, гидрофизический модуль (13), радиомаяк (14), сейсмический датчик (15), блок (20) пространственной ориентации. Причем блок (20) пространственной ориентации состоит из электронного 3D компаса, трех акселерометров и трех измерителей угловых скоростей, жестко сочлененных с сейсмическим датчиком (15). Сейсмический датчик (15) выполнен в виде широкополосного молекулярно-электронного датчика. Герметичный корпус (1) выполнен в виде полусферы, имеющей основание в форме тарелки, по верхнему диаметру которой установлены механические элементы размыкателя (8) балласта (2). Механические элементы размыкателя (8) балласта (2) выполнены в виде строп (3), которые сочленены с балластом (2) и плотно прилегают к основанию герметичного корпуса (1) по его нижнему диаметру. Гидроакустический канал связи для соединения сейсмического модуля с диспетчерской станцией выполнен однорелейным. Технический результат: повышение достоверности регистрируемых данных. 3 ил.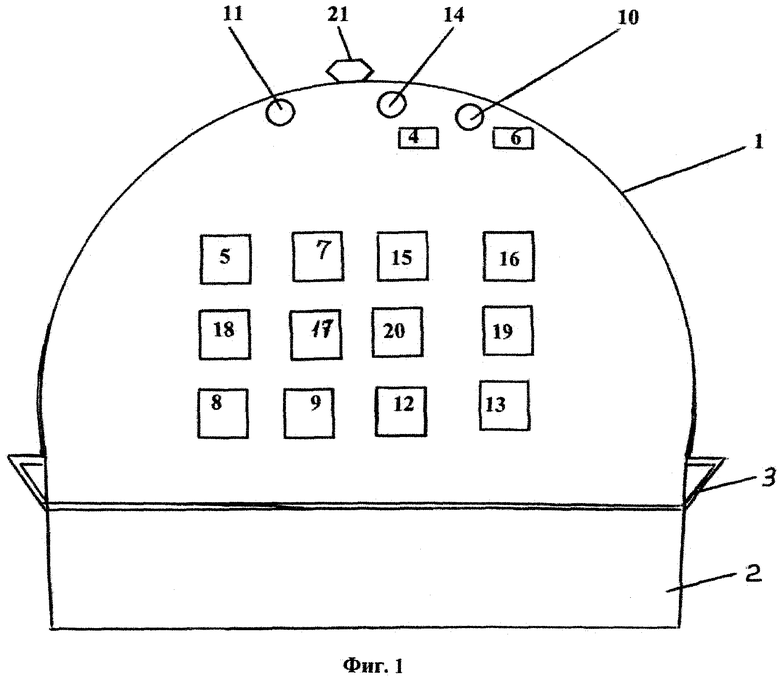
Малогабаритный донный сейсмический модуль, соединенный гидроакустическим каналом связи с диспетчерской станцией и состоящий из герметичного корпуса, гидрофизического модуля, устройства регистрации геофизических сигналов, включающего сейсмический датчик, накопителя на жестком диске, блока пространственной ориентации, балласта, размыкателя балласта, таймера размыкателя, проблескового маяка, радиомаяка, разъема внешней связи, источника питания, отличающийся тем, что герметичный корпус выполнен в виде полусферы, сочлененной с основанием герметичного корпуса, выполненным в виде тарелки, по верхнему диаметру которой установлены механические элементы размыкателя балласта, выполненные в виде строп, которые сочленены с балластом, плотно прилегающим к основанию герметичного корпуса по его нижнему диаметру, средство связи с диспетчерской станцией выполнено в виде однорелейного гидроакустического канала связи, при этом блок пространственной ориентации состоит из электронного 3D компаса, трех акселерометров и трех измерителей угловых скоростей, жестко сочлененных с сейсмическим датчиком, а сейсмический датчик выполнен в виде широкополосного молекулярно-электронного датчика.
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ ВЫПОЛНЕНИЯ ГЕОФИЗИЧЕСКИХ И ГЕОЛОГОРАЗВЕДОЧНЫХ РАБОТ | 2008 |
|
RU2381530C1 |
| АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2010 |
|
RU2438149C2 |
| СИСТЕМА ДЛЯ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2008 |
|
RU2392643C2 |

