2
1В
(Л
4
о
4
00
коррекции характеристик силового регулятора в зависимости от величины продольного ускорения и уклона дороги. Регулятор содержит сдающую 2 и исполнительную 3 днафрагменныс камеры, соединенные трубопроводом 10, заполненные жидкостью и установленные соответственно в моторном отсеке транспортного средства на механизме 29 автоматического управления. В задающей ка.мере установлен инерционно-гравитационный корректор, состоящий из груза (Г) 20, посредство.м стержня 21 шарнирно подвешенного на кронштейне 22. (/гержень 21 в средней
4
части зажат между итоками 8, 15 и образует относительно них рычаг второго ряда. При неустановившемся движении транспортного средства по дороге с уклоном Г создает инерционную и гравитацион ную силы, которые суммируются с усилением настроечной пружины 12, зависящим от положения кулачка 16, связанного с педалью акселератора. Соответственно из.ме- няется давление регулятора 30 давления, связанного с исполнительной камерой. В результате характеристики механизма 29 кор- ректи)уются по продольному ускорению и ук.тону дороги. 3 ил.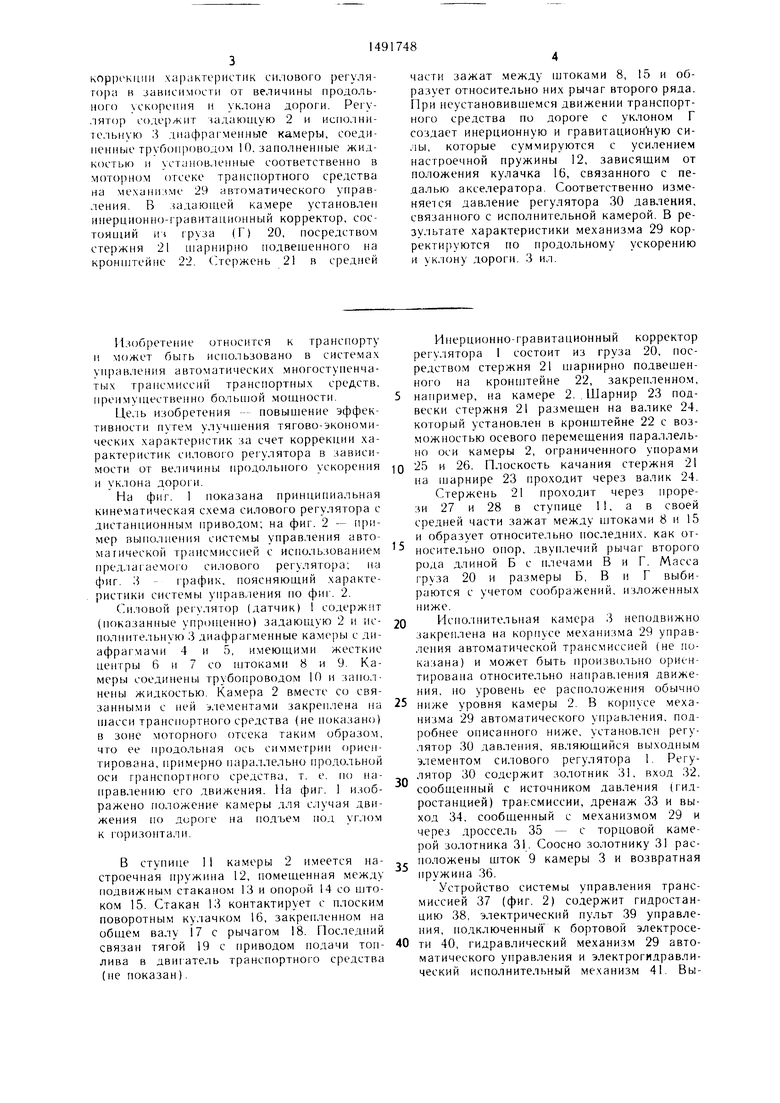
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор давления системы автоматического управления трансмиссией транспортного средства | 1978 |
|
SU766915A1 |
| Система автоматического управления трансмиссией транспортного средства | 1966 |
|
SU887286A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2503559C2 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ ФМВ | 1993 |
|
RU2061600C1 |
| Силовой регулятор с дистанционным приводом для автоматических трансмиссий транспортных средств | 1977 |
|
SU695860A1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИЛОВОГО АГРЕГАТА ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2569212C1 |
| Гидравлический автомат управления и защиты многоступенчатой трансмиссии с электромагнитными клапанами дистанционного переключения ступеней | 1985 |
|
SU1362674A1 |
| Система управления трансмиссиейТРАНСпОРТНОгО СРЕдСТВА | 1977 |
|
SU850418A1 |
| Коробка передач транспортного средства | 1981 |
|
SU1009824A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕАКТИВНОЙ СИЛОЙ АКСЕЛЕРАТОРА | 2009 |
|
RU2466881C2 |

Изобретение может быть использовано в трансмиссиях транспортных средств преимущественно большой мощности и грузоподъемности. Цель изобретения - повышение эффективности путем улучшения тягово-экономических характеристик за счет коррекции характеристик силового регулятора в зависимости от величины продольного ускорения и уклона дороги. Регулятор содержит задающую 2 и исполнительную 3 диафрагменные камеры, соединенные трубопроводом 10, заполненные жидкостью и установленные соответственно в моторном отсеке транспортного средства на механизме 29 автоматического управления. В задающей камере установлен инерционно-гравитационный корректор, состоящий из груза (Г) 20, посредством стержня 21 шарнирно подвешенного на кронштейне 22. Стержень 21 в средней части зажат между штоками 8, 15 и образует относительно них рычаг второго ряда. При неустановившемся движении транспортного средства по дороге с уклоном Г создает инерционную и гравитационную силы, которые суммируются с усилением настроечной пружины 12, зависящим от положения кулачка 16, связанного с педалью акселератора. Соответственно изменяется давление регулятора 30 давления, связанного с исполнительной камерой. В результате характеристики механизма 29 корректируются по продольному ускорению и уклону дороги. 3 ил.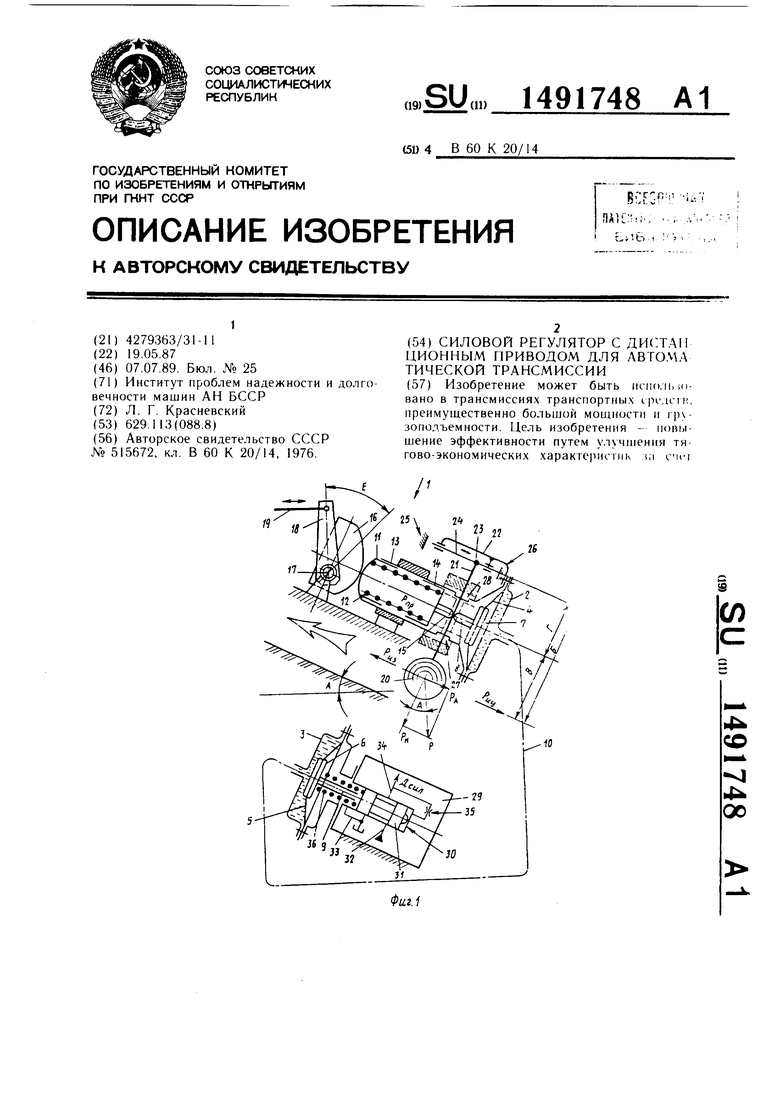
Изобретение относится к транспорту и может быть использовано в системах уиравления автоматических многоступенчатых трансмиссий транспортных средств, преимущественно большой мошности.
Це.ль изобретения - повышение эффективности путем улучцдения тягово-экономи- ческих характеристик за счет коррекции характеристик силово1 О регулятора в зависимости от величины продольного ускорения и уклона д оро1 и.
На фиг. 1 показана принципиальная кинематическая схема силового регулятора с дистанционным приводом; на фиг. 2 - пример выполнения системы управления автомагической трансмиссией с использованием предла аемого силового регулятора; на фиг. .3 - 1 рафик, поясняющий характеристики системы управления по фиг. 2.
Силовой регулятор (датчик) 1 содержит (показанные упро1ценно) задающую 2 и ис- полнительную 3 диафрагменные камеры с диафрагмами 4 и Г), имеющими жесткие центры 6 и 7 со ц токами 8 и 9. Камеры соединены трубопроводом 10 и заполнены жидкостью. Камера 2 вместе со связанными с ней цементами закреплена на шасси транспортного средства (не показано) в зоне моторного отсека таким образо.м, что ее продольная ось симметрии ориентирована, примерно параллельно продольной оси гранспортного средства, т. е. по направлению его движения. На фиг. 1 изображено положение камеры для случая движения по дороге на подъем под углом к горизонтали.
В ступице 1 I камеры 2 имеется настроечная пружина 12, помешенная между подвижным стаканом 13 и опорой 14 со штоком 15. Стакан 13 контактирует с плоским поворотным кулачком 16, закрепленном на общем валу 7 с рычагом 18. Последний связан тягой 19 с приводом подачи топ- лива в двигатель транспортного средства (не показан).
5
д
0 5
0
0
5
Инерционно-гравитационный корректор регулятора 1 состоит из груза 20, посредством стержня 21 шарнирно подвешенного на кронштейне 22, закрепленном, например, на камере 2. , Шарнир 23 подвески стержня 21 размещен на валике 24. который установлен в кронштейне 22 с возможностью осевого перемещения параллельно оси камеры 2, ограниченного упорами 25 и 26. Плоскость качания стержня 21 на 1парнире 23 проходит через валик 24.
Стержень 21 проходит через прорези 27 и 28 в ступице II, а в своей средней части зажат между штоками 8 и 15 и образует относительно последних, как относительно опор, двуплечий рычаг второго рода длиной Б с плечами В и Г. Масса груза 20 и размеры Б, В и Г выбираются с учетом соображений, изложенных н иже.
Исполнительная камера 3 неподвижно закреплена на корпусе механизма 29 управления автоматической трансмиссией (не показана) и может быть произвольно ориентирована относительно направления движения, но уровень ее расположения обычно ниже уровня камеры 2. В корпусе механизма 29 автоматического управления, подробнее описанного ниже, установ,1ен регулятор 30 давления, являющийся выходным элементом силового регулятора 1. Регулятор 30 содержит золотник 31, вход 32, сообщенный с источником давления (гидростанцией) трансмиссии, дренаж 33 и выход 34, сообщенный с механизмом 29 и через дроссель 35 - с торцовой камерой золотника 31. Соосно золотнику 31 расположены шток 9 камеры 3 и возвратная пружина 36.
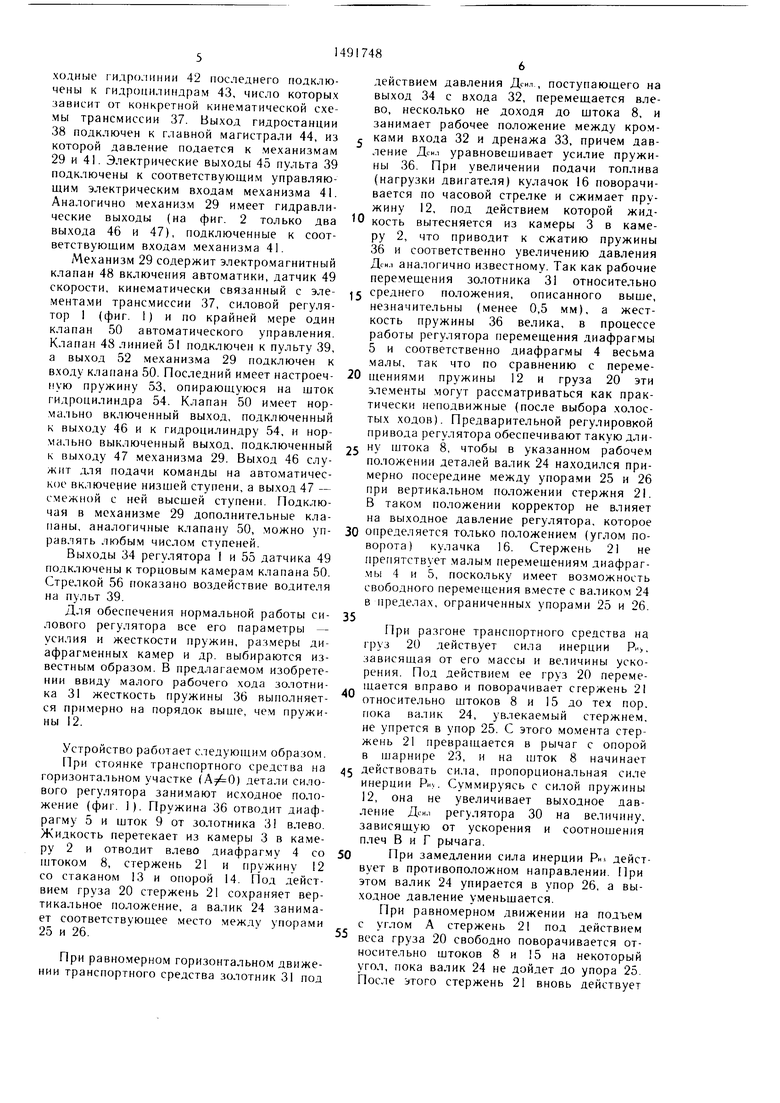
Устройство системы управления трансмиссией 37 (фиг. 2) содержит гидростанцию 38, электрический пульт 39 управления, подключенный к бортовой электросети 40, гидравлический механизм 29 автоматического управления и электрогидравлический исполнительный механизм 41. Выходные гидролинии 42 последнего подключены к гидроцилиндрам 43, число которых зависит от конкретной кинематической схемы трансмиссии 37. Выход гидростанции 38 подключен к главной магистрали 44, из которой давление подается к механизмам 29 и 41. Электрические выходы 45 пульта 39 подключены к соответствующим управляющим электрическим входам механизма 41. Аналогично механизм 29 имеет гидравлические выходы (на фиг. 2 только два выхода 46 и 47), подключенные к соответствующим входам механизма 41.
Механизм 29 содержит электромагнитный клапан 48 включения автоматики, датчик 49 скорости, кинематически связанный с элементами трансмиссии 37, силовой регулятор I (фиг. 1) и по крайней мере один клапан 50 автоматического управления. Клапан 48 линией 51 подключен к пульту 39, а выход 52 механизма 29 подключен к входу клапана 50. Последний имеет настроечную пружину 53, опирающуюся на щток гидроцилиндра 54. Клапан 50 имеет нормально включенный выход, подключенный к выходу 46 и к гидроцилиндру 54, и нормально выключенный выход, подключенный к выходу 47 механизма 29. Выход 46 служит для подачи команды на автоматическое включение низшей ступени, а выход 47 - смежной с ней высщей ступени. Подключая в механизме 29 дополнительные клапаны, аналогичные клапану 50, можно управлять любым числом ступеней.
Выходы 34 регулятора I и 55 датчика 49 подключены к торцовым камерам клапана 50. Стрелкой 56 показано воздействие водителя на пульт 39.
Для обеспечения нормальной работы силового регулятора все его параметры - усилия и жесткости пружин, размеры ди- афрагменных камер и др. выбираются известным образом. В предлагаемом изобретении ввиду малого рабочего хода золотника 31 жесткость пружины 36 выполняется примерно на порядок выше, чем пружины 12.
Устройство работает следующим образом.
При стоянке транспортного средства на горизонтальном участке () детали силового регулятора занимают исходное положение (фиг. 1). Пружина 36 отводит диафрагму 5 и щток 9 от золотника 3 влево. Жидкость перетекает из камеры 3 в камеру 2 и отводит влево диафрагму 4 со штоком 8, стержень 21 и пружину 12 со стаканом 13 и опорой 14. Под действием груза 20 стержень 21 сохраняет вертикальное положение, а валик 24 занимает соответствующее место между упорами 25 и 26.
При равномерном горизонтальном движении транспортного средства золотник 31 под
действием давления Дсил , поступающего на выход 34 с входа 32, перемещается влево, несколько не доходя до щтока 8, и занимает рабочее положение между кром- , ками входа 32 и дренажа 33, причем давление Дсил уравновешивает усилие пружины 36. При увеличении подачи топлива (нагрузки двигателя) кулачок 16 поворачивается по часовой стрелке и сжимает пружину 12, под действием которой жид0 кость вытесняется из камеры 3 в камеру 2, что приводит к сжатию пружины 36 и соответственно увеличению давления Дсил аналогично известному. Так как рабочие перемещения золотника 31 относительно
5 среднего положения, описанного выше, незначительны (менее 0,5 мм), а жесткость пружины 36 велика, в процессе работы регулятора перемещения диафрагмы 5 и соответственно диафрагмы 4 весьма малы, так что по сравнению с переме0 щениями пружины 12 и груза 20 эти элементы могут рассматриваться как практически неподвижные (после выбора холостых ходов). Предварительной регулировкой привода регулятора обеспечивают такую дли5 ну щтока 8, чтобы в указанном рабочем положении деталей валик 24 находился примерно посередине между упора.ми 25 и 26 при вертикальном положении стержня 21. В тако.м положении корректор не влияет на выходное давление регулятора, которое
0 определяется только положением (углом поворота) кулачка 16. Стержень 21 не препятствует малым перемещениям диафрагмы 4 и 5, поскольку имеет возможность свободного перемещения вместе с валиком 24 в пределах, ограниченных упорами 25 и 26.
5
При разгоне транспортного средства на груз 20 действует сила инерции Ри, зависящая от его массы и величины ускорения. Под действием ее груз 20 перемещается вправо и поворачивает сгержень 21 относительно щтоков 8 и 15 до тех пор, пока валик 24, увлекаемый стержнем, не упрется в упор 25. С этого момента стержень 21 превращается в рычаг с опорой в шарнире 23, и на щток 8 начинает
5 действовать сила, пропорциональная силе инерции Риу. Суммируясь с силой пружины 12, она не увеличивает выходное давление Дсил регулятора 30 на величину, зависящую от ускорения и соотнощения плеч В и Г рычага.
0При замедлении сила инерции Ри. действует в противоположном направлении. При этом валик 24 упирается в упор 26, а выходное давление уменьщается.
При равно.мерном движении на подъем с углом А стержень 21 под действием
веса груза 20 свободно поворачивается относительно щтоков 8 и 5 на некоторый угол, пока валик 24 не дойдет до упора 25. После этого стержень 21 вновь действует
на рычаг, передавая на шток 8 тангенциальную составляющую Рд веса Р груза 20. Действительный угол наклона стержня будет несколько меньше угла А за счет свободного хода валика 24 до упора, однако на фиг. 1 это не отражено ввиду небольшой разницы между ними. Действие силы Р складывается с усилием пружины 12 и увеличивает выходное давление. Наоборот на спусках давление уменьшается.
В общем случае - при неравномерном движении по дорогам переменного профиля - действует одновременно как сила инерции, так и тангенциальная составляющая веса груза 20, так что на шток 8 деист- вует их результирующая.
Таким образом, инерционно-гравитационный корректор корректирует выходное давление силового регулятора в зависимости от ускорения поступательного движения транспортного средства и уклона дороги. Для пояс- нения влияния этой корректировки на работу автоматической трансмиссии рассматривается работа ее системы управления.
Для переключения ступеней трансмиссии 37 (фиг. 2) вручную водитель воздейству- ет на пульт 39, с выходов 45 которого электрические сигналы, соответствующие выбранной им ступени, поступают к механизму 41, а последний подает давление из главной магистрали 44 в те из гидроцилиндров 43, которыми включается данная ступень.
Для перехода на режим автоматического управления водитель включает, также посредством пульта 39, клапан 48, и с выхода 52 последнего давление из магистрали 44 подается на вход клапана 50. Положение клапана 50 зависит от соотношения давлений датчиков 1 и 49. При малом давлении датчика 49 (малой скорости движения) клапан 50 находится в исходном положении (фиг. 2), и давление гидролинии лоступает на выход 46, что вызывает включение механизмом 41 низшей (напри мер, первой) ступени в трансмиссии 37.
По мере разгона транспортного средства давление датчика 49 возрастает и при определенной скорости клапан 50 переклю- чается в положение высшей ступени, подавая давление на выход 47. Это приводит к автоматическому включению высшей ступени.
При уменьшении скорости клапан 50 возвращается в-исходное положение и ав- томатически включается низшая ступень.
Характеристики описанной системы представлены на графике (фиг. 3). Сплощными линия.ми даны характеристики известной системы без коррекции, а штрихпунктир
ными - с учетом коррекции по ускорению и уклону. Кривые 57 и 58 во И и IV квадрантах изображают характе10
jj
20
js ЗО
35
45
0
5
ристики датчиков I и 49, прямые 59 и 60 в I квадранте - характеристики клапана 50, а кривые 61 и 62 а IV квадранте - законы переключения ступеней, получаемые из тягово-экономического расчета транспортного средства. Здесь Дсил, Дек - выходные давления силового и скоростного датчиков; С - скорость движения; Е - угол поворота кулачка 16 от начального положения.
Как видно из графика, при отсутствии коррекции каждому положению кулачка 16 соответствует одно определенное значение скорости, при котором происходит каждое перек тючение. Так, при фиксированном произвольном положении Е давление датчика 1 будет равно . По линии 59 находят соответствующие ему значение Дек, а по кривой 57 - величину скорости С при которой произойдет переключение вверх.
При наличии корректора характеристика силового регулятора (датчика) 1 представляется заштрихованным полем, ограниченным кривыми 63 и 64, соответствующими максимальным положительным и отрицательным величинам коррекции относительно номинала (кривой 58). В этом случае одному и тому же произвольному значению Е будет соответствовать поле Дс значений скорости для переключений вверх, построение которого очевидно. Соответственно в III квадранте законы переключений будут изображаться заштрихованными полями вместо одиночных кривых 61 и 62.
Как видно из фиг. 3, при любом произвольном Е увеличение выходного давления силового регулятора сверх номинальной величины Дсил вследс1вие действия ускорения приведет к увеличению давления Дек и соответственно скорости, при которой произойдет переключение вверх Наоборот, замедление приведет к уменьшению этой скорости. Следовательно, в процессе разгона движение на низщей ступени будет продолжаться до тех пор, покаона обеспечивает высокое ускорение, что в некоторой степени сходно с режимом «Кик-даун в известных системах. При уменыпении ускорения (в конце скоростной характеристики двигателя) произойдет быстрое переключение на высшую ступень, на которой запас тягового усилия будет выше. В результате улучшится динамическая характеристика разгона, а также уменьшится вероятность возникновения цикличности автоматических переключений.
Предлагаемая коррекция позволяет воздействовать на характеристики транспортного средства и на ряд других режимов движения. При практическом выборе характеристик корректора такой анализ выполняется в ходе предшествующего ему тягово- экономического расчета транспортного средства. В ре.п льтате расчета выбираются законы переключений в виде аа1итрихЬванных зон в III квадранте (фиг. 3). Эти законы являются исходными данными, по которым очевидными построениями получают требуемые границы характеристик регулятора - кривые 63 и 64. Далее выбираются параметры корректора (Б, В. Г и Р), обеспечивающие максимально возможное приб.тижение фактических характеристик к кривым 63 и 64.
Возможны различные модификации предлагаемого устройства. Так, убирая упор 25 или 26, можно получить коррекцию по ускорению только при разгоне (и подъеме) или замедлении (и спуске). Возможны различные варианты подвески груза 20. Так, для уменьшения свободного хода люфта, зоны нечувствительности, создаваемого ходом валика 24, штоки 8 и 15 могут иметь большой диа.метр (на фиг. 1 показано пунктиром). При этом стержень 21 будет зажат между ними, что несколько изменит работу корректора. Груз 20 может быть в частном случае выполнен в виде кольца (показано пунктиром), посаженного на ступицу 1 1 без кронштейна 22 и т. д. Силовой регулятор (фиг. 1) может иметь ряд дополнительных элементов. Все эти .модификации не меняют общих принципов предлагаемого изобретения, их совокупность позволяет получить в гидравлических системах управления дополнительно положительные свойства, которые обычно связываются лишь с применением электроники.
5
0
5
0
формула изопрстении Силовой регулятор с диета нционны.м приводом для автоматической трансмиссии, преимущественно транспортных средств боль- пюй единичной мощности, содержащий приемную и исполнительную диафрагменн1 1е камеры с жесткими центрами, сообщенные между собой трубопроводом и занолнен- ные жидкостью, задающее устройство, выполненное в виде поворотного кулачка, кинематически связанного с приводом подачи топлива в двигатель транспортного средства, и настроечной пружины, с опорой установленной между кулачком и диафрагмой приемной камеры, и исполнительное устройство, выполненное в виде гидравлического регулятора давления, имеющего затвор, взаимодействующий с диафрагмой исполнительной камеры через пружину, а также вход питания, подключенный к гидростанции трансмиссии, и выход, являющийся выходом силового регулятора, отличающийся тем, что, с целью повышения эффективности путем улучшения тягово-экономи- ческих характеристик за счет коррекции характеристик регулятора в зависимости от величины продольного ускорения и уклона дороги, он снабжен инерционно-гравитационным корректором, выполненным в виде рычага второго ряда, шарнирно связанного с опорой, имеющей возможность ограни- MOjiHoro перемещения вдоль продольной оси транспортного средства, при этом на конце длинного плеча рычага закреплен груз, а KOiien короткого плеча защемлен между жестким центром приемной диафрагменной камеры и опорой настроечной пружины.
6 i 2 }
58
А сил,
so я
| Силовой регулятор с дистанционным приводом для автоматической трансмиссии | 1973 |
|
SU515672A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
