L Zr1J
ты 24 реле 23 включены в линию,соединяющую блок 19 с сумматором 20. Блоки 7, 17, 19 подключены к входам сумматора 20, Каждый из выходов сумматора 20 соединен с одним из входов элементов И, ИЛИ 21, 22, вторые входы каждого из которых подключены к
20904
выходу блока 8. Выходы элементов И, ИЛИ 21, 22 подключены к входам регулятора 10. Обобщенный сигнал, полученный в сумматоре 20, используется для уменьшения скорости вращения привода 1 до допустимой вакуумитричной высоты всасывания. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Насосная станция | 1986 |
|
SU1413281A1 |
| Система управления насосными агрегатами | 1986 |
|
SU1374193A1 |
| Способ защиты компрессора от помпажа и устройство для его осуществления | 1986 |
|
SU1377461A1 |
| Устройство автоматического управления горной машиной | 1986 |
|
SU1423737A1 |
| Устройство автоматического согласования и контроля режимов многоступенчатых насосных и гидротранспортных установок | 1982 |
|
SU1079568A1 |
| УЧЕБНЫЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС "АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ И ТЕПЛОТЕХНИЧЕСКИЙ КОНТРОЛЬ" | 2009 |
|
RU2433482C2 |
| Способ управления электроприводом постоянного тока механизма с пульсирующей нагрузккой на валу и устройство для его реализации | 1979 |
|
SU855909A1 |
| УСТРОЙСТВО ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ И ПРИВОДИМОГО ОБОРУДОВАНИЯ | 2003 |
|
RU2263383C1 |
| Устройство для управления мощностью турбоагрегата | 1985 |
|
SU1359438A2 |
| Устройство для автоматизированного приготовления питательного раствора в теплице | 1990 |
|
SU1831997A1 |
Изобретение может быть использовано в станциях перекачки горючего. Цель изобретения - повышение эффективности работы насоса путем учета при управлении параметров окружающей среды и св-в перекачиваемой жидкости. Система управления приводом насоса содержит каналы контроля (КК) давлений на входе и выходе насоса 2 и КК кавитационного запаса. Каждый КК содержит датчик (Д) 3,4 и задатчик 5,6 контролируемого параметра и блок 7,8 сравнения соответственно, к входу к-рого подключены выходы Д 3,4 и задатчика 5,6 соответственно. Выходы блоков 7,8 соединены с входами блока 9 управления режимом работы привода 1, подключенного к входу регулятора 10, выход которого соединен с приводом 1. Каждый из КК атмосферного давления, плотности и т-ры среды содержит Д 11,12,13, задатчик 14,15,16 и блок 17,18,19 сравнения соответственно к входу к-рого подключены выходы Д 11,12,13 и задатчика 14,15,16 соответственно. Блок 9 выполнен в виде сумматора 20 и элементов И и ИЛИ 21,22. Цепь управления реле 23 подключена к выходу блока 18. Контакты 24 реле 23 включены в линию, соединяющую блок 19 с сумматором 20. Блоки 7, 17,19 подключены к входам сумматора 20. Каждый из выходов сумматора 20 соединен с одним из входов элементов И, ИЛИ 21,22, вторые входы каждого из которых подключены к выходу блока 8. Выходы элементов И, ИЛИ 21,22 подключены к входам регулятора 10. Обобщенный сигнал, полученный в сумматоре 20, используется для уменьшения скорости вращения привода 1 до допустимой вакуумитричной высоты всасывания. 1 ил.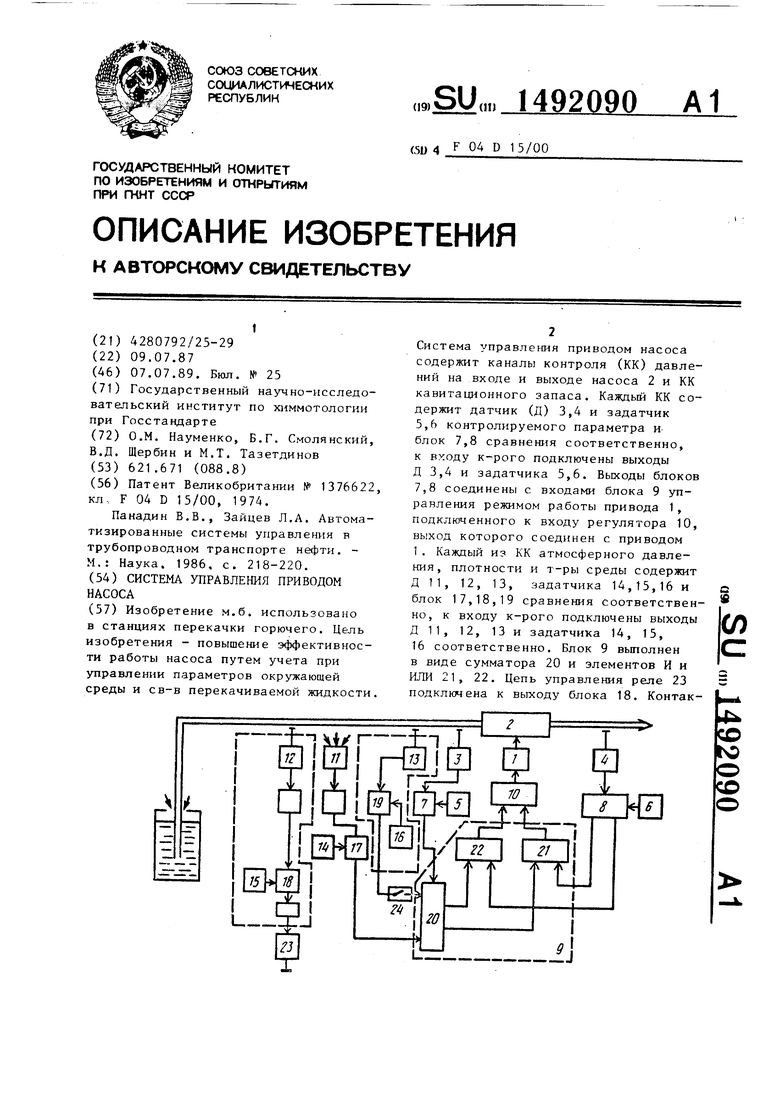
Изобретение относится к насосо- строению и может быть использовано в станциях перекачки горючего.
Цель изобретения - повышение эффективности работы насоса путем уче та при управлении параметров окружающей среды и свойств перекачиваемой жидкости.
На чертеже показана принципиальная схема системы управления.
Система управления приводом 1 насоса 2 содержит каналы контроля давлений на входе и выходе насоса
2и канал контроля кавитационного запаса, при этом каналы контроля давлений на входе и выходе насоса 2 содержат соответственно датчики 3
и 4 и задатчики 5 и 6 давления и блоки 7 и 8 сравнения, к входам которых подключены выходы датчиков
3и 4 и задатчиков 5 и 6.Выходы блоков 7 и 8 сравнения этих каналов соединены с входами блока 9 управления режимом работы привода 1 насоса 2, подключенного к входу регу- дятора 10, выход которого соединен
с приводом 1. При этом система снабжена каналами контроля атмосферного давления, плотности и температуры перекачиваемой среды, каждый из которых содержит соответственно датчик 11-13 и задатчик 14-16 контролируемого параметра и блок 17-19 сравнения. К входам последних подключены выходы датчика 11-13 и задатчика 14-16 соответствующего канала.Блок 9 управления режимом работы выполнен в виде сумматора 20 и элементов И и ИЛИ 21 и 22. Система содержит реле 23, цепь управления которого подключена к выходу блока 18 сравнения канала контроля плотности а контакты 24 реле 23 включены в линию, соединяющую блок 19 сравнения контроля температуры с сумматором 20.Блоки 7, 17 и 19 сравнения каналов контроля давления на входе насоса 2, атмосферного давления и температуры
5
0
5
0
5
0
5
0
5
подключены к входам сумматора 20, причем каждый из выходов сумматора 20 соединен с одним из входов элементов И и ИЛИ 21 и 22,вторые входы каждого из которых подключены к выходу блока 8 сравнения канала контроля давления на выходе насоса 2, а выходы элементов И и ИЛИ 21 и 22 подключены к входам регулятора 10.
Система работает в следующих эксплуатационных режимах.
Режим А. Работа в нормальных условиях.Температура перекачиваемой среды и окружающего воздуха около +20 С. Станция находится не более 200-250 м над уровнем моря.
Режим Б. Работа при перекачке лег- кокнпящих жидкостей, например бензинов с температурой от +20 до +50°С, причем причиной нагрева бензина может быть повышенная температура окру жающсго воздуха, в районе не выше 200j-250 м над уровнем моря.
Режим 3. Работа при перекачке сред, например дизельного топлива, авиационного керосина, воды, в районах, расположенньп высоко над уровнем моря (500 м и выше).
Режим Г. Работа при перекачке легкокипящих жидкостей, например, бензинов, в районах, расположенных высоко над уровнем моря(более 500 м) и при повышенных (более 20°С) температурах перекачивания среды.
Система работает следующим образом.
В режиме А насос работает на номинальной скорости вращения, обеспечивая расчетную подачу при давлении на выходе, определяемой величиной сопротивления его напорной магистрали. При увеличении давления на выходе насоса 2 (например, при уменьщении расхода жидкости потребителями, подключенными к напорной магистрали) сигнал с датчика 4 давления на выходе, соответствующей по- рышению давления, сравнивается в
блоке 8 сравнения с уставкой задат- чика 6, а сигнал рассогласования с первого выхода блока 8 поступает в блок 9 управления на вход логического элемента ИЛИ 22, с выхода которого сигнал через регулятор 10 поступает на управляющий вход регулируемого привода 1. Последний уменьшает скорость вращения ротора насоса 2 и тем самым уменьшает давление на выходе до заданного значения.
Аналогично происходит регулирование при увеличении разрежения на вхо де насоса 2. В этом случае сигнал с датчика 3 давления на входе поступает на вход 7, где он сравнивается с уставкой задатчика 5. Сигнал разбаланса через сумматор 20, логический элемент ИЛИ 22 и регупятор 10 поступает на вход привода 1. Тем самым уменьшается скорость вращения до тех пор, пока разреже1ше на входе насоса 2 не становится равным уставке задатчика 5. Разрешение на входе может изменяться вследствие увеличения длины всасывающей магистрали или при перекачке жидкости из заглубленного резервуара, уровень в котором постоянно уменьшается по мере откачки .
Если сопротиЕление всасывающей магистрали 3 уменьшается (например, перекачку стали производить из резервуара, в котором уровень выше оси насоса 2) , а давление на выходе ниже уставки задатчика 6, то появляются сигналы на вторых выходах блока 8 сравнения и сумматора 20, которые поступают на вход логического элемента И 21. С его выхода сигнал проходит через регулятор 10 на привод 1, увеличивая тем самым скорость вращения до тех пор, пока не повысится давление на выходе или не уменьшится давление на входе до пределов, задаваемых задатчиками 5 или 6.
в режиме Б насос 2 работает на пониженных подачах за счет снижения скорости вращения привода 1.С повышением температуры перекачиваемой жидкости соответственно снижается допускаемая вакуумметрическая высо та всасывания. В этом случае регулирование режима работы происходит аналогично регулированию в режиме А.
Только в этом случае сигнал рассогласования между датчиком 13 и
920906
задатчиком 16 на уменьшение скорости вращения с выхода блока 19 канала контроля температуры перекачиваемой среды через нормально закрытый контакт 24 реле 23 приводит на вход сумматора 20, а с его первого вьпсо- да - на вход логического элемента ИЛИ 22. Сигнал с выхода логичес10 кого элемента ИЛИ 22 поступает на вход регулятора 10, который дает команду на привод 1 для уменьшения скорости вращения. Скорость вращения привода 1 насоса 2 снижается до тех
15 пор, пока допустимая высота всасывания не принимает такое значение,устанавливаемое задатчиком 16, при котором обеспечивается устойчивая надежная работа по перекачке легкозаки20 пающих жидкостей с повьш1енной температурой.
Степень уменьшения скорости вращения до восстановления допускаемой вакуумметрической высоты всасывания
25 определяется предварительно. Канал контроля плотности в этом случае за счет рассогласования сигналов от датчика 12 и задатчика 15 обеспечивает включение реле 23, включая тем
30 самым в работу канал контроля температуры через нормально открытый контакт 24 .
С повышением температуры существенно изменяется давление насьш1енньгх
паров только у легкокипящих жидкостей, например бензина. Сигнал с датчика 12 плотности сравнивается с уставкой задатчика 15. При перекачке легкокипящих жидкостей сигнал
40 рассогласования с выхода блока 18 сравнения запитывает реле 3, которое своим контактом включает в контур регулирования канал контроля температуры. В этом случае канал
45 контроля температуры может работать в сочетании с сигналами, поступающими от датчика 3 давления на входе. Суммирование двух сигналов происходит в сумматоре 20.
5Q В режиме В регулирование работы осуществляется от датчика 11 атмосферного давления. С увеличением высоты над уровнем моря атмосферное давление уменьшается и, следователь55 ° уменьшается допускаемая вакуум- метрическая высота всасывания. В этом случае необходимо снизить скорость вращения привода 1 насоса 2 на определенную величину. Сигнал с
выхода датчика 11 в блоке 17 сравнивается с уставкой задатчика 14 и поступает в сумматор 20. Так как влияние температуры иа упругость паров в этом случае незначительно, то канал контроля температуры отключается с помощью контактов 24 реле 23.
Снижение скорости вращения привода 1 насоса 2 происходит до тех пор, пока не обеспечивается повышение допускаемой вакуумметрической высоты всасывания в новых условиях работы. Прохождение сигналов после сумматора 20 происходит аналогично режиму А.
В режиме Г при перекачке легкокипящих жидкостей в районах, расположенных выше 500 м над уровнем моря, и при повьппенных (&ыше ) температурах перекачиваемого горючего система работает следующим образом. Регулирование режима работы осуществляется одновременно по каналам контроля плотности, температуры и атмосферного давления. Сигналы с выходов их блоков 18, 19 и 17 сравнения суммируются в сумматоре 20 и обобщенный сигнал используется для уменьшения скорости вращения привода 1 насоса 2 до пределов,соответствующих такому значению допустимой вакуумметрической высоты всасывадшя при котором в новых условиях обеспечивается надежная работа станции.
Формла изобретения
Система управления приводом насо са, содержащая каналы контроля давлений на входе и выходе насоса и канал контроля кавитационного запа
5
0
5
0
5
0
са, при этом каждый канал содержит датчик и задатчик контролируемого параметра и блок сравнения, к входу которого подключены выходы датчика и задатчика, а выходы блоков сравнения всех каналов соединены с входами блока управления режимом работы привода насоса, подключенного к входу регулятора, выход которого соединен с приводом, отличающая- с я тем,что, с целью повышения эффективности работы привода насоса путем учета при управлении параметров окружающей среды и свойств перекачиваемой жидкости, система снабжена каналами контроля атмосферного давления, плотности и температуры перекачиваемой среды, каждый из которых содержит датчик и задатчик контролируемого параметра и блок сравнения, к входам которого подключены выходы датчика и задатчика канала, блок управления резкимом работы выполнен в виде сумматора и элементов И и ИЛИ, при этом система содержит реле, цепь управления которого подключена к выходу блока сравнения канала контроля плотности, а контакты реле включены в линию, соединяющую блок сравнения контроля температуры с сумматором, блоки сравнения контроля давления на входе насоса, атмосферного давления и температуры подключены к входам сумматора, г ричем каждый из выходов сумматора соединен с одним из входов элементов И и ИЛИ, вторые входы каждого из которых подключены к выходу блока сравнения канала контроля давления на выходе, а выходы элементов И и ИЛИ подключены к входам регулятора.
| Патент Великобритании № 1376622, кл, F 04 D 15/00, 1974 | |||
| Панадин В.В., Зайцев Л.А | |||
| Автоматизированные системы управления в трубопроводном транспорте нефти | |||
| - М.: Наука | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Прибор для измерения силы звука | 1920 |
|
SU218A1 |
