(54) СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА МЕХАНИЗМА С ПУЛЬСИРУЮЩЕЙ НАГРУЗКОЙ НА НАЛУ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ Изобретение относится к электротех шке и может быть использовано в схемах управления поршневыми насосами высокого давления буро вых установок, гидровскрытия, химической про мышленности и т.д. Для этих насосов характерна работа на слож ную гидравлическую систему, зачастую большой протяженности и требуюш;ую большого диапазона регулирования гидравлического режима при высоких требованиях к его стабильности, в том числе ограниченной алтлитуды пульсаций давления, которая связана с неравномерностью подачи при равномерном вращении рабочего вала насоса. Для насосов, работакнцих в бурении и гидровскрытии, характерна также ограниченная активная мощность источников питания, например дизель-генераторов. Кроме того, вЗтом случае требуется feiCTpoe восстановление циркуляции жидкости после стоянки насоса и оседания шламма в гидравлическсш системе, притем восстановление циркуляции происходит быстрее при пульсации давления на выкиде насоса. Для этих насосов после восстанойяения циркуляции иеобхояимо ограничивать уровень пульсаций величиной 2-5/. Наиболее близким по техниюской еущиоети к изобретению является способ управления электроприводом постоянного тока механизма с пульсирующей нагрузкой на валу, например поршневого насоса, согласно которому регулируют частоту вращения электродвигателя изменением напряжения на якоре и 1Г меис11ием тока возбуждения в функции тока якоря, и ограничивают при этом максимальное значение тока якоря в функции величины тока возбуждения и величины напряжения на якоре. Этим способом решается задача регулирования скорости с механической характеристикой, близкой к характеристике постоянной мощности. Мягкая механическая характеристика электропривода при данном способе управления обеспечивает удорлетворительное гашение вынужденных колебаний 1. Известно устройство для реализации способа управления электроприводом постоянного тока механизма с пульсирующей нагрузкой la валу, содержащее регулируемые вентильные преобразователи, подключенные к якорной оЬмотке и обмотке возбуждения электродвигателя постоянного тока, последовательно включенные регулятор напряжения и регулятор тока в цепи управлегшя пр еобразователем якорной цепи, ко входам которых подключены соответственно датчики напряжения и тока якоря, регулятор тока возбуждения в цепи управления возбуждением двигателя, ко входу которого подключен датчик тока возбуждения, первый выделитель модуля, вход которого подключен к датчику тока якоря, а выход - через первый бло4 нелинейности ко входу регулятора тока возбуж дения, второй выделитель модуля, вход которого соединен с датчиком напряжения на якоре, а выход - с одним из входов сумматора, второй вход которого через второй блок нелинейности соединен с выходом датчика тока возбуждения, а выход сумматора подключен к управляющему входу регулируемого блока ограничения в цепи обратной связи регуляторанап ряже ьшя. Недостатком данного способа и устройства для его реализации является запаздывание изменения скорости при пульсации момента на валу, .что может привести к динамической неУСТОЙ1ШВОСТИ. Цель изобретения -- повышение динамической устойчивости электропривода за счет улучшения сглаживания нагрузочной диаграммы элект ропривода. Цель достигается тем, что согласно способу управления электроприводом постоянного тока механизма с пульсирующей нагрузкой на валу дополнительно задают величину потребляемой электродвигателем мощности и среднее зпачеiOie параметра, характеризующего режим работы механизма, измеряют действительное значение этого параметра, измеряют угол поворота рабочего вала механизма и величину потребляемой электродвигателем мощности, при этом сравнивают заданное среднее значение параметра, характеризующего режим работы механизма, с его действительным значением, результат сравнения корректируют в фу1псции угла пово рота рабочего вала механизма и заданной вели чины мощности, потребляемой электродвигателем, скорректированный сигнал ограничивают в функции величины мощности, потребляемой электродвигателем, и используют для задания напряжения на якоре электродвигателя. Причем в качестве параметра, характеризующего режим работы механизма, используют значение расхода перекачиваемого вещества или давление перекачиваемого вещества. Для достижения цели в устройство для реализации способа управления электроприводом постоянного тока механизма с пульсирующей нагрузкой дополнительно введены регулятор и одключенные к его входам задатчик и датчик реднего значения параметра, характеризующего режим работы механизма, датчик положения раойго вала механизма, датчик потребляемой электродвигателем мощности, блок ограничения, блок перемножения, сумматор и фазочувствительный выпрямитель, при этом выход задатчика среднего значения параметра, характеризующего режим работы механизма, подключен ко входам сумматора и датчика положения вала, выход датчика положения вала через фазочувствительный выпрямитель подключен ко второму входу сумматора и к собственному входу, а выход сумматора - к одному из входов блока перемножения, второй вход которого соединен с выходом регулятора параметра, характеризующего режим работы механизма, а выход - со входом блока ограничения, управляющий вход которого соединен с датчиком потребляемой электродвигателем мощности, а выход - со входом регулятора напряжения. Данный слосоО осуществляется следующим образом. Сигнал задания гидравлического режима работы механизма (например, величину давления для насосов гидровскрытий или расхода перекачиваемого вещества шш насосов буровых установок) в виде пропорционального требуемому значению параметра напряжения постоянного тока сравнивают с сигналом в виде напряжения постоянного тока, пропорциональным среднему значению контролируемого параметра. Эту разность усиливают и модулируют колебаниями, связанными с процессом неравномерной подачи порщневого насоса. Для этого сигнал задания преобразуют в переменное напряже1П1е и затем формируют зависимость амплитуды и фазы переменного напряжения от угла поворота рабочего вала механизма при помощи, например, вращающегося трансформатора. Это напряжение при помощи фазочувствительного выпрямителя превращают в постоянное напряжение переменной полярности и амплитуды, причем фазовый сдвиг этого напряжения может регулироваться за счет изменения относительного положения рабочего вала насоса и подвижной части вращающегося трансформатора. Полученное таким образом напряжение по амплитуде пропорционально сигналу задания, т.е. однозначно связано со средними выход1п 1ми параметрами, характеризующими режим работы механизма, и через положение подвижной части с вращающего трансформатора полученный сигнал бднозначно определяется функцией., т.е. произведением сигнала задания на функцию угла поворота U3-f(a), ифив К
где Ufhv - напряжение на выходе фазочувствительного усилителя; Us - напряжения сигнала задания параметра, характеризующего режим работы механизма; f(a) - знакопеременная функция; а - угол. поворота рабочего вала
механизма.
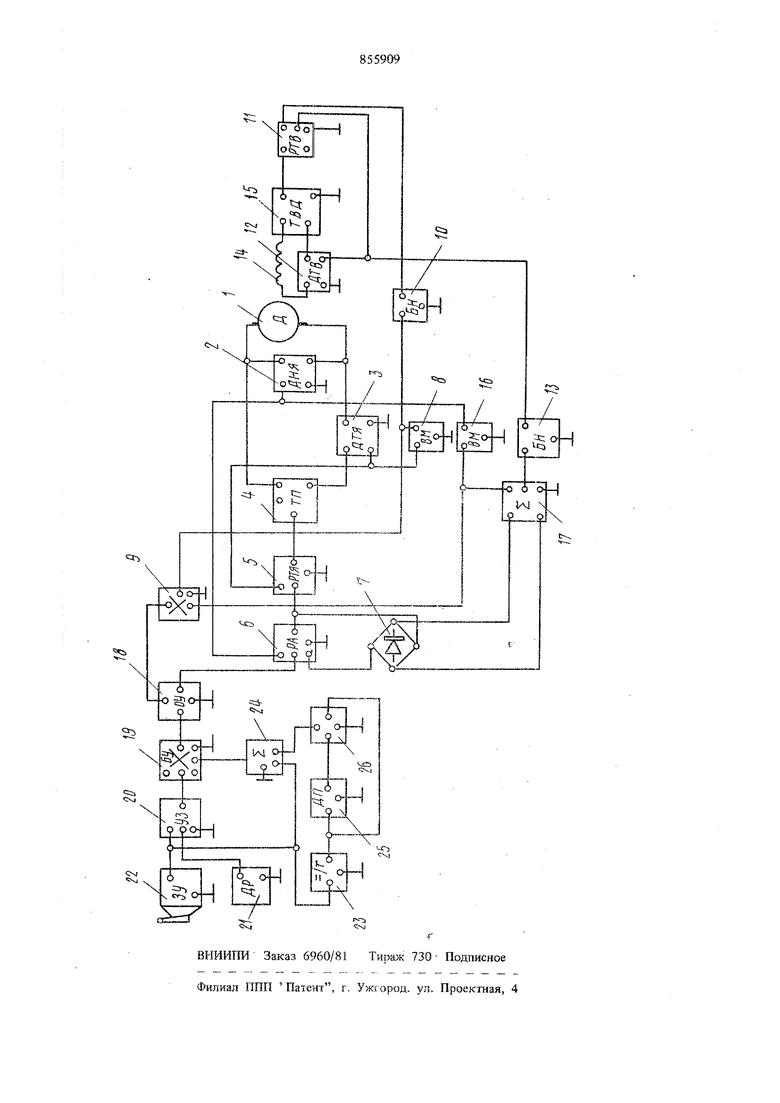
Полученную величину, колебательно меняюшумся с углом поворота рабочего вала механизма, суммируют с сигналом задания и полученную сумму перемножают с разностью задающего сигнала и сигнала обратной связи. Получают сложный сигнал, зависящий от Uj и Us . Такая квадратичная зависимость повышает быстродействие привода при больших рассогласованиях и облегчает формирование динамических режимов за счет их асиптотической устойчивости. Полученное произведение используют для задания режимов работы электродвигателя механизма. При этом величину задания ограничивают по условиям работы источника знергии в функции потребляемой мошности и по максимальному уровню напряжения на якоре электродвигателя. Наличие в сигнале заДания синусоидальной составляющей регулируемого фазового сдвига / позволяет наложить на напряжение и ток электродвигателя, а следовательно, и на частоту вращения его якоря колебания, позволяющие уменьшить подачу перекачиваемого вещества при положении рабочего вала механизма, соответствующего максимальной подаче при постоянной частоте вращения, и увеличить подачу при положении рабочего вала механизма, соответствующего минимальной подаче при постоянной частоте врашения. При этом подавляется основная гармоническая составляющая колебаний расхода или давления. Подавление этой составляющей облегчается выбором угла с некоторым упреждением и коэффициента К в уравнении. При серьезных нарущениях циркулядии перекачиваемого вещества сигнал задания режимов работы электродвигателя ограничивают и устраняют тем самым в нем переменную составляющую, что позволяет при помощи импульсов давления ускорить восстановление циркулящ1и. Поскольку расход и давление на выходе насоса являются функцией Us, то коэффициентом Uj компенсируют действие постоянных времени электродвигателя (электромагнитной постоянной време1Ш и электромеханической постоянной вре менн) на амплитуду принудительно накладываемых на частоту вращения рабочего вала насоса вынужденных колебаний. На чертеже приведена схема устройства. Якорь 1 электродвигателя с подключенным к нему входом датчика 2 напряжения на якоре последовательно с датчиком 3 тока якоря
подключены к выходу вентильного преобразо вателя 4. Ко входу преобразователя 4 подключен выход регулятора 5 тока якоря, первый вход которого подключен к выходу регулятора 6 напряжения и первому входу блока 7 ограничения, выполненного в виде диодно-мостовой схемы, а второй вход регулятора 5 тока якоря присоединен к выходу датчика 3 тока якоря и входу выделителя 8 модуля тока якоря. Выход выделителя 8 модуля тока якоря присоединен к первому входу датчика 9 мощности и ко входу блока 10 нелинейности, выход которого присоединен к первому входу регулятора 11 тока возбуждения, ко второму входу которого присоединен выход датчика 12 тока возбуждения и вход блока 13 нелинейности. Вход датчика 12 тока возбуждения включен между обмоткой 14 возбуждения электродвигателя и выходом вентильного преобразователя 15, вход которого подключен к выходу регулятора 11 тока возбуждения. Выход датчика 2 напряжения присоединен к первому входу регулятора 6 напряжедая и ко входу выделителя 16 модуля. Выход выделителя 16 модуля присоединен ко второму входу датчика 9 мощности и к первому входу сумматора 17, ко второму входу которого присоединен выход блока 13 нелинейности, а к встречному выходу подключены выводы постоянного тока диодно-мостовой схемы, второй вход переменного тока этой схемы присоединен к третьему входу регулятора 6, второй вход которого присоединен к выходу блока 18 ограничения, первый вход которого подключен к выходу датчика 9 мощности, а второй вход соединен с выходом блока 19 перемножения. К первому входу блока 19 перемножения присоединен выход регулятора 20 параметра, характеризующего режим работы механизма, к первому входу которого присоединен выход датчика 21 среднего значения параметра. Выход задатчика 22 среднего значения параметра, характеризующего режим работы механизма, присоединен ко второму входу регулятора 20 параметра, характеризующего режим работы механизма, ко входу преобразователя 23 постоянного напряжения в переменное и к первому входу сумматора 24. Выход преобразователя 23 присоединен ко входу бесконтактного датчика 25 положения рабочего вала механизма и первому входу фазочувствительного выпрямителя 2 Выход датчика 25 положения рабочего вала механизма присоединен ко второму входу выпрямителя 26, выход которого присоединен ко второму входу сумматора 24, выход которого подключен ко входу блока 19 перемножения.
Устройство работает следующим образом.
Задающий сигнал с выхода задатчкка 22 параметра, характеризующего режим работы ме . ханизма насоса, поступает на оба входа блока 19 перемножения,, причем на первый вход через регулятор 20 параметра, а на второй непосредственно. Сигнал задания на входе регулятора 20 параметра сравнивается с сигналом обратной связи, образуемым на выходе датчика 21 среднего значения параметра, например датчика сред него значения давления или среднего значения расхода, что обеспечивает пропорциональное регулирование режима механизма или регулирование режима механизма по другому, более сложному закону. До достижения мощностью, потребляемой электродвигателем 1, максимально допустимой вели1шны сигнал на выходе блока 18 ограничения определяется напряжением на выходе датчика 9 мощности, потребляемой электродвигателем. При превыщении мощностью потребляемой электродвигателем, значе1шя, допустимого по условиям работы источника питания, например автономного дизель-генератора, напряжение на выходе блока 18 ограничения и, следовательно, на входе регулятора 6 напряжения ограничивается, что приводит к ограничению напряжения и тока якоря электродаигателя. Дальнейщее рассмотре ше работы устройства проводится раздельно по быстродействующему каналу управления (полоса пропускания 10-15 Гц) и медленно действующему каналу (f - 4-5 Гц). В быстродействующий канал управления входят регулятор 6 напряжепия, ре гулятор 5 тока, вентильный преобразователь 4, датчик 3 тока, датчик 2 напрял ения, якорь 1 з;гектродвигателя, выделители 8 и 16 модуля сигнала, сумматор 17, блок 7. Медленно действующий канал, полоса пропускания которого невелика вследствие значительной индуктивности обмотки 14 возбуждения, содержит бло, ки 10 и 13 нелинейности, регулятор Г1 тока возбуждения, вентильный преобразователь 15 и датчик 12 тока возбуждения. Сигнал задания по напряжению на втором входе регулятора 6 содержит относительно постоянную составляющую, обуславливающую необходимый средний режим работы механизма и относительно быстро колеблющуюся составляющую (f 5-7 Гц) связанную с измене шем положения рабочего вала механизма и служащую для созда1ния колебания частоты вращения якоря 1 электродвигателя, компенсирующую неравномерности подата при постоянной скорости. Оба составляющих на входе регулятора 6 напряжения сравниваются с сигналом, снимаемым с выхода датчика 2 напряжения, и при помоши регулятора 6 напряжения формируется сигнал задания по току якоря, который на входе регулятора 5 тока якоря сравнивается с citrHanoM, снимаемым с выхода датчика 3 тока якоря. Сигнал иа выходе регулятора 6 напряжепия ограничивается в функции параметров, влияющих на коммутацию при помощи узла, состоящего из блока 7, сумматора 17, выделителя модуля 16, блока 13 нелинейности, датчиков 2 напряжения и 12 тока возбуждения. На выходе регулятора 5 тока якоря формируется сигнал, который усиливается вентильным преобразователем и формирует закон изменения тока якоря электродвигателя, обеспечивающий компенсацию неравномерности подачи механизма. В предельных режимах, например, при использовании изобретения в схемах управления буровым насосом в режиме восстановления циркуляции сигнал на выходе датчика 21, в качестве которого используется датчик среднего расхода, минимален, что обуславливает максимальный сигнал на выходе регулятора 20 параметра. В этом режиме переменная составляющая срезается узлом 18 ограничения и на выходе насоса облегчает восстановление циркуляции. Таким образом, обеспечивается регулирование частоты вращения с адаптивным изменением связей привода, что невозможно в известных компенсирующих устройствах. Задатчиком режима медленнодействующего канала является датчик 3 тока якоря. При помощи выделителя 8 модуля определяется абсолютное значение сигнала на выходе датчика 3 тока якоря, а затем с помощью блока 10 нелинейности формируется сигнал задания на входе регулятора И токавозбуждения, где он сравнивается с сигналом обратной связи, снимаемым с выхода датчика 12 тока возбуждения. Блок 10 нелинейности выполняет функции формирования оптимальной по энергетическим показателям зависимости ток якоря - ток возбуждения, а также ограничение максимального и минимального Значений тбка возбуждения. Механическая характеристика в этом случае гиперболическая, т.е. оптимальная в автономном электроприводе. На всей цепи: датчик 3 тока якоря - выделитель 8 модуля - блок 10 нелинейности - регулятор 11 тока возбуждения - выход преобразователя 15, действуют колебания сигнала на выходе, вызванные действием датчика 25 положения вала механизма. Эти колебания отсутствуют в сигнале на выходе датчика 12 тока возбуждения, так как постоянная времени обмотки возбуждения электродвигателя больше или равна 1 с, а преобразователь 15 для приводов насосов выбирается с небольшим запасом по напряжению. Однако колебания напряжения на входе блока 10 нелинейности при малых значениях тока якоря частично детектируются, что приводит к увеличению потока электродвигателя и облегчению отработки этих колебаний якорем электродвигателе. Сигнал, снимаемый с выхода датчика 12 тока возбуждения по цепи: блок 13 нелинейности - сумматор 17 - блок 7, использу9ется для ограничения тока якоря 1, исходя из условий коммутации на якоре электродвигателя. Таким образом, в результате применения данного изобретения адаптивно стабилизируются параметры на выходе механизма, обеспечивается ограничение мощности, потребляемой от первичного двигателя, и осуществляется ограничение режима электродвигателя постоянного тока. Формула изобретения 1. Способ управления электроприводом постоянного тока механизма с пульсирующей нагрузкой на валу, например поршневого насоса, согласно которому регулируют частоту вращения электродвигателя изменением напряжения на якоре и изменением тока возбуждения в функщ1И тока якоря, и ограничивают при этом максимальное значе ше тока якоря в функции величины тока возбуждения и величины напряжения на якоре, отличающийся те что, с целью повышения ;динамической устойчивости электропривода за счет улучшения сглаживания нагрузошой диаграммы, дополнительно задают величину потребляемой электродвигателем мощности и среднее значение параметра, характеризующего режим работы механизма, измеряют действительное значение этото па раметра, измеряют угол поворота рабочего вала механизма и ве;шчину потребляемой электродвигателем мощности, при этом сравнивают заданное среднее значение параметра, характернзующего режим работы механизма, с его дей ствительным значением, результат сравнения ко ректируют в функции угла поворота рабочего вала механизма и заданной величины мощности потребляемой электродвигателем, скорректированный сигнал ограничивают в функции величи ны мощности, потребляемой электродвигателем и используют для задания напряжения на якоре электродвигателя. 2. Способ по п. 1, о т л и ч а ю щ и йс я тем, что в качестве параметра, характеризующего режим работы механиэма, используют значение расхода перекачиваемого вещества. 3. Способ по п. 1, о т л и ч а ю щ и йс я тем, что в качестве параметра, характеризующего режим работы механизма, используют давление перекачиваемого вещества. 4. Устройство для реализации способа по п. 1, содержащее регулируемые вентильные преобразователи, подключенные к якорной обмотке и обмотке дозбуждения электродвигателя постоянного тока, последовательно включенные регулятор напряжения и регулятор тока в цепи управления преобразователем якорной цепи, ко входам которых подключены соответственно датшки напряжения и тока якоря, регулятор тока возбуждения в цепи управления возбуждением двигателя, ко входу которого подключен датчик тока возбуждения, первый выделитель модуля, вход которого подключен к датчику тока якоря, а выход - через первый блок нелинейности ко входу регулятора тока возбуждения, второй выделитель модуля, вход которого соединен с датчиком напряжения на якоре, а выход - с одним из сумматора, второй вход которого через второй блок нелинейности соединен с выходом датчнка тока возбуждения, а выход сумматора подключен к управляющему входу регулируемого блока ограничения в цепи обрат1юй связи регулятора напряжения, отличающееся тем, что, с целью улучшения сглаживания нагрузочной диаграммы, в него введены регулятор и подключенные к его входам задатчик и ртчик среднего значения параметра,характеризующ -1 о режим работы механизма, датчик положения рабочего вала , датчик потребляемой электродвигателем мощности, блок ограничения, блок перемножения, сумматор и фазочувствительный выпрямитель, при этом выход задатчика среднего значения параметра, характеризующего режим работы механизма, подключен ко входам сумматора и датчика положения вала, выход датчика положения вала через фаэочувствительный выпрямитель подключен ко второму входу сумматора к к собственному входу, а выход сумматора - к одному из входов блока перемножения, второй вход которого соединен с выходом регулятора параметра, характеризующего режим работы механизма, а выход - со входом блока ограничения, управляющий вход которого соединен с дат«й1ком потребляемой злектродвнгателем мощностн, а выход - со входом регулятора напряжения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 56813J, кл. Н 02 Р 5/26, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1979 |
|
SU855910A1 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1978 |
|
SU771835A1 |
| Устройство для двухзонного регулирования скорости | 1980 |
|
SU928577A2 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1975 |
|
SU556547A1 |
| Способ управления электроприводом постоянного тока и устройство для управления электроприводом постоянного тока | 1979 |
|
SU860249A2 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| Электропривод постоянного тока | 1977 |
|
SU729800A1 |
| Устройство для регулирования тока якоря электродвигателя | 1976 |
|
SU656169A1 |
| Устройство для двухзонного регулирования скорости | 1978 |
|
SU769694A2 |