(21)4322105/24-10
(22)30,09.87
(46) 15.07.89. Бил. N 26 (75) Б.Б. Бочаров
(53)771.316 (088.8)
(56)Авторское свиг.етельстпо СССР № 1401430, кп. G 03 В 37/00, 1986.
(54)ПАИОРА ТО.Й СТРРЕОФОТОАППАРАТ
(57)Изобретение отиосигся к оптическому приборостроению. Цать изобретения - получение стереоизображений круговой панорамы. Предлагаемый панорамный стереофотоаппарат содержит два съемочных блока, каждый из которых содержит объектив И и пленку 18 с лентопротяжным механизмом. Пленка
и лентопротяжный механизм каждого блока могут синхронно перемещаться с помощью общего механизма относительно объективов. Это позволяет осуществлять фокусировку на заданную ность. Оба съемочных блоке вместе с объективами также могут перемещаться вдоль оптических осей, изменяя положение объективов относительно оси вращения по формуле V(D-f) b , где S --расстояние вдоль оптической оси между главной точкой объектива и центром вращения; D - дапьность; f - (Ъокусное расстояние и b - половина расстояния оптическими ося- mi съемочных блоко-в (половина базы стереосъемки ). Весь механизм установлен на поворотной платформе 9, ось вращения которой расположена между оптическими осяю съемочных блоков на равном расстоянии от них. Такое устройство фотоаппарата позволяет обеспечить одинаковую кадра при любой дальности. 2 ил.
(/}


| название | год | авторы | номер документа |
|---|---|---|---|
| Панорамная фотокамера | 1986 |
|
SU1401430A1 |
| Способ определения пространственных координат точек местности | 1985 |
|
SU1278580A1 |
| Способ получения стереоскопических снимков с синтезированной величиной стереобазы | 2019 |
|
RU2703611C1 |
| Способ панорамной стереосъемки | 2016 |
|
RU2650088C1 |
| РАСТРОВОЙ СТЕРЕОСЪЕМКИ | 1972 |
|
SU340997A1 |
| Способ контроля точности системы автоматической фокусировки объектива съемочного аппарата и устройство для его осуществления | 1983 |
|
SU1345080A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ СТЕРЕОИЗОБРАЖЕНИЙ | 1992 |
|
RU2037864C1 |
| ПРИБОР ПАНОРАМНЫЙ | 2018 |
|
RU2708535C1 |
| Панорамная фотокамера с углом обхвата 360 @ | 1988 |
|
SU1597852A1 |
| СПОСОБ ПАНОРАМНОГО ВИДЕОНАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2574346C1 |
Изобретение относится к оптическому приборостроению. Цель изобретения - получение стереоизображений круговой панорамы. Предлагаемый панорамный стереофотоаппарат содержит два съемочных блока, каждый из которых содержит объектив 11 и пленку 18 с лентопротяжным механизмом. Пленка и лентопротяжный механизм каждого блока могут синхронно перемещаться с помощью общего механизма относительно объективов. Это позволяет осуществлять фокусировку на заданную дальность. Оба съемочных блока вместе с объективами также могут перемещаться вдоль оптических осей, изменяя положение объективов относительно оси вращения по формуле S=D-√(D-F)2-B2, где S - расстояние вдоль оптической оси между главной точкой объектива и центром вращения
D- дальность
F- фокусное расстояние
B- половина расстояния между оптическими осями съемочных блоков (половина базы стереосъемки). Весь механизм установлен на поворотной платформе 9, ось вращения которой расположена между оптическими осями съемочных блоков на равном расстоянии от них. Такое устройство фотоаппарата позволяет обеспечить одинаковую длину кадра при любой дальности. 2 ил.
Изобретение относится к оптическому приборостроению.
Цель изобретения - получение стереоизображений объектов круговой панорамы с сохранением условия возможности фокусировки оптической системы фотокамеры на объекты любой дальности при сохранении длины протягиваемой фотопленки за один оборот плат- форкы без изменения передаточного от ношения устройства синхронизации.
Для достижения цели изображения необходимо определить положение объективов относительно оси вращения платформы, при котором длина протягиваемой фотопленки не будет зависеть от дальности до объектов.
на которую фокусируются объективы; определить длину протягиваемой фотопленки за один оборот платформы, гфи которой будет обеспечено масштабное соответствие между длиной объекта и длиной его изображения.
4
СО ОС СР
Известно, что масщтаб изображения вырадкается формулой 1f
m D-f
(1)
ще m - знаменатель масштаба;
f - фокусное расстояние объектива;
D - расстояние от объекта до передней главной точки объектива.
31А93
Объект круговой панорамы D - f должен занимать участок на протягиваемой фотопленке длиной f.
Если длина окружности круговой
панорамы радиуса R равна С 2ffR, тогда можно допустить, что о&ьект длиной (D-f) К раз уложится в ней, т.е.
2 ,..04
D-f
К
(2)
Тогда для правильной передачи масштаба длина фотопленки за один оборот платформы дсш)гна быть с( f-K )Ипи с учетом (2)
2ffP D-f
-W
(3)
Из полученного выражения следует, 20 что величина протяга L не будет зависеть от D если:
1
()
25
в том случае, когf(5)
(/ 2Й ,
т.е. длина не зависит от D. При такой длине фотопленки
d 2irf С 2ffR
m
ff - .А
R (6
что полностью соответствует формуле
(О.
с помощью фиг.1 определим значение R в интересующем нас случае стереосъемки. На этом чертеже показаны объектив А, сфокусированный на объект В, находящийся на расстоянии D от него. Положение объектива относительно оси О вращения платформы определяется величинами S и В.
Радиус круговой пaнopa йl:
R b
+ (D - S)
(7)
с учетом (50 получим уравнение:
Уь .(D - S) -D-f (8)
решив кот строе относительно S, полу.- чим формулу S D - Y(D -f) - b (9). В частном случае формулы (9),, при b О, получается соотношение
О
5
0
5
5
0
5
0
5
4
S f I которое и было использовано в известном сте1: еофотоаппарате.
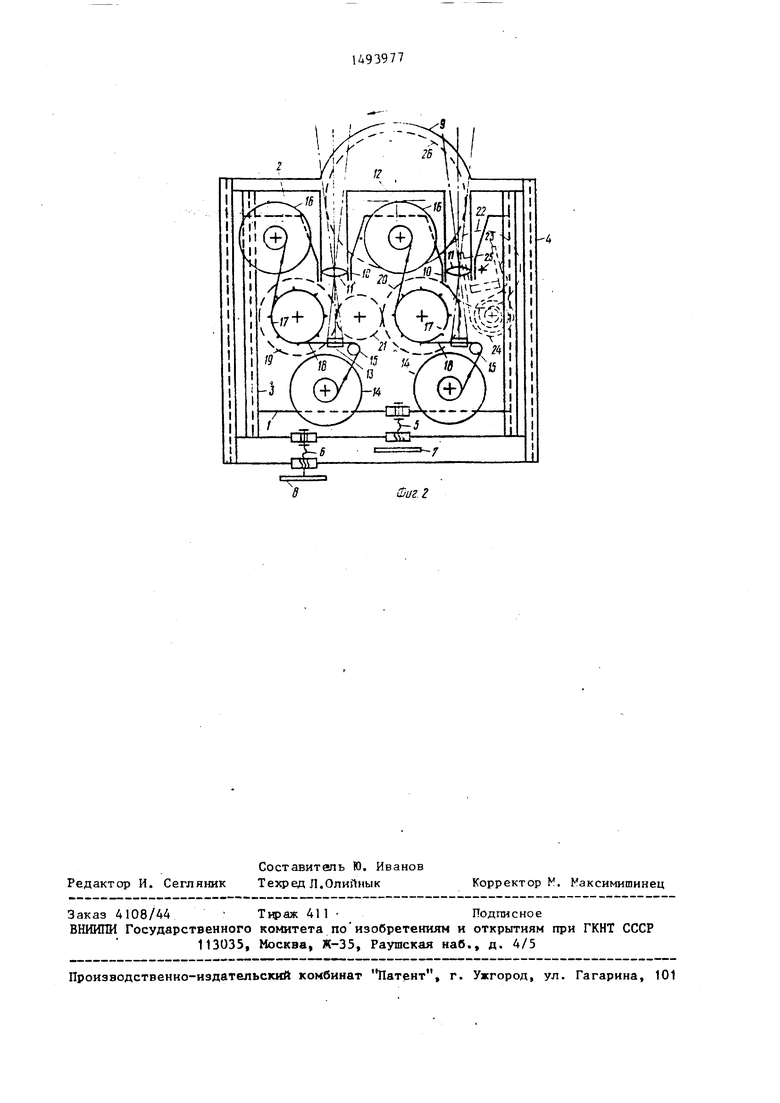
На фиг.1 изображено положение объектива, оптическая ось которого не проходит через ось вращения платформы; на фиг.2 - кинематическая схема панорамной фотокамеры,
Панорамная фотокамера содержит две подвижные каретки - основную 1 и дополнительную 2, которые с помощый направляющих 3,4, червячных передач . 5, 6 и маховичко в 7 и 8 с нанесенными на их поверхностях метками дальности до объектов круговой панорам, подлежащих фокусировке, имеют возможность перемещения относительно поверхности поворотной го1атформ 1 9, вдоль оптических осей объективов.
Основная каретка 1 размещается на дополнительной 2. На верхней поверхности основной каретки 1 размещена камерная часть, которая содержит - две обоймы 10 объективов 11, установленные на одинаковых расстояниях от оси вращения 12 платформы 9, которые в сумме образуют базис съемки; - две щелевые кадровые рамки 13; две пода- дающие катушки 14 с направляющими роликами 15; две приемные катушга 16; два транспортирующих барабана 17, протягивающих фотопленки 18.
На нижней поверхности основной каретки 1 размещены: ведомые зубчатые щестерни 19, 20 транспортирующих барабанов 17 с паразитной щестерней 21, обеспечивающей их вращение в одну и ту же сторону; приводы приемных катушек (не показаны), устройство состоящее из щестерни 22, качающейся вилки 23, прижимной пружины 24, осевого направляющего вкладащ1а 25, которое при перемещении кареток обеспечивает постоянно зацепление ведомых шестерен транспортирующих барабанов с одной из щестерен ,26 устройства синхронизации вращения платформы с протягом фотопленки.
Для обеспечени я вращения транспортирующих барабанов только в одном направлении, ось ведомой шестерни 20 барабана содержит муфту односторонней передачи вращения (не показана).
На верхней поверхности дополнительной каретки 2 установлены оптические блоки объективов 11,«таким образом, что их главные плоскости оказываются совмещенными, и направляющие 3 основной каретки. На верхней поверхности поворотной платформы размещены ее направляющие 4.
Панорамная фотокамера работает слеующим образом.
Цри осуществлении фокусировки оптических блоков объективов 11 на определенную дальность, вращением червяка 5 осуществляют изменение расстояния мезиду совмещенной главной зад-10 ней плоскостью объективов и плоскостью наружных поверхностей фотопленок, при этом каретка 1 перемещается по направляющим 3, а подпружиненная вилка 23 обеспечивает постоянство зацепле- 15 НИН щестерен 20, 22, 26, Другими словами, по меткам лимба маховичка 7 устанавливают необходимую дальность съемки.
После этого вращением червяка 6 20 осуществляют изменение расстояния между совмещенной передней главной плоскостью объективов и осью 12 вращения платформы в соответствии с формулой (9). Другими словами, по меткам 25 имба маховичка 8 производят коррекировку положения основной каретки.
Съемка объектов круговой панорамы производится при вращении платформы 1,
Формула изобретения
Панорамный стереофотоаппарат, содержащий поворотную платформу с установленным на ней съемочным блоком, включающим объектив и лентопротяжный механизм, кинематически связанный с поворотной платформой и с фильмовым каналом, установленные с возможностью перемещения вдсхль оптической оси относительно объектива, причем центр вращения платформы находится впереди главной точки объектива, о т л и ч а - ю щ и и с я тем, что, с целью получения стереоизображения круговой панорамы, на поворотной платформе установлен второй съемочный блок, идентичный первому, при этом ось вращения платформы размещена между съемочными блоками на равном расстоянии от их оптических осей, а их лентопротяжные механизмы и фильмовые каналы имеют общий механизм перемещения вдоль оптической оси, причем оба блока имеют возмож- ность синхронного перемещения вдоль оптических осей относительно центра вращения поворотной платформы в соответствии с формулой
где 3
D
f b
D - J(D - f)- b ,
-расстояние от главной точки объектива до центра вращения вдоль оптической оси;
-дальность, на которую фокусирован объект;
-фокусное расстояние;
-половина базы стереосъемки;
U2.1
Suz.Z
