Изобретение относится к электротехнике, может быть использовано для управления силовыми статическими вентильными преобразователями и является усовершенствованием известного способ.а по св. № 1325642.
Цель изобретения - повышение точности отработки сигнала задания тока в переходных режимах при прерывистом токе нагрузки.
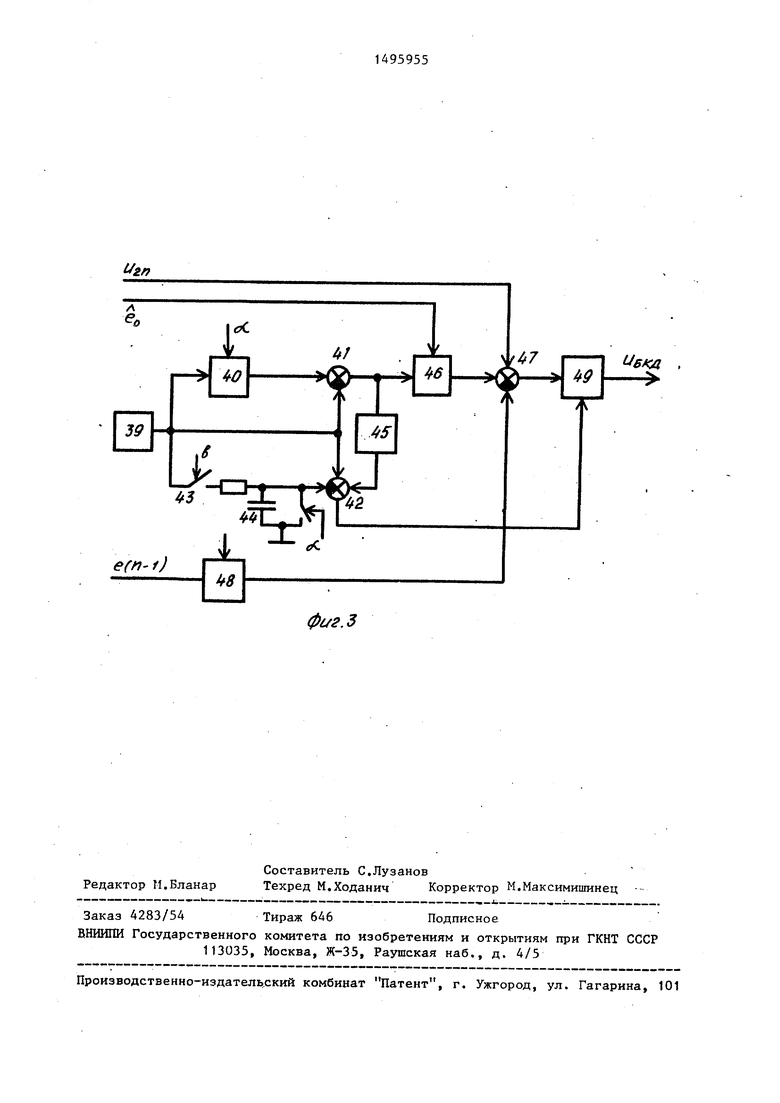
На фиг.1 изображена функциональная (Х:хема устройств, на фиг.2 - блок
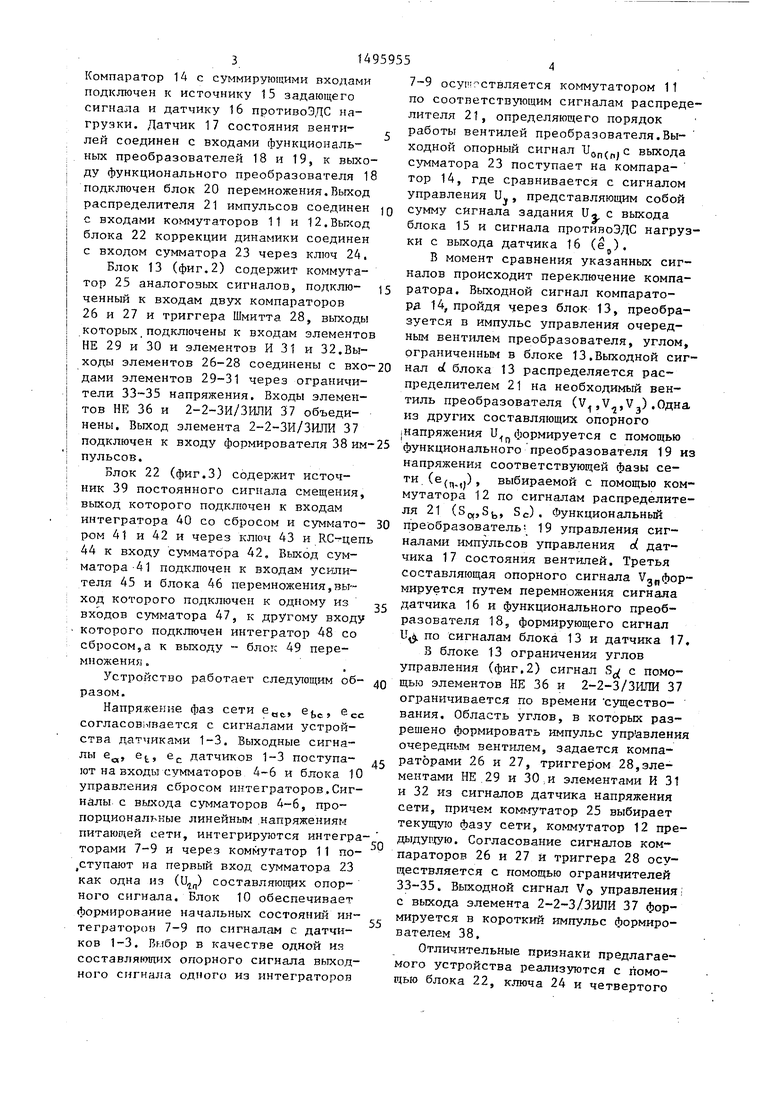
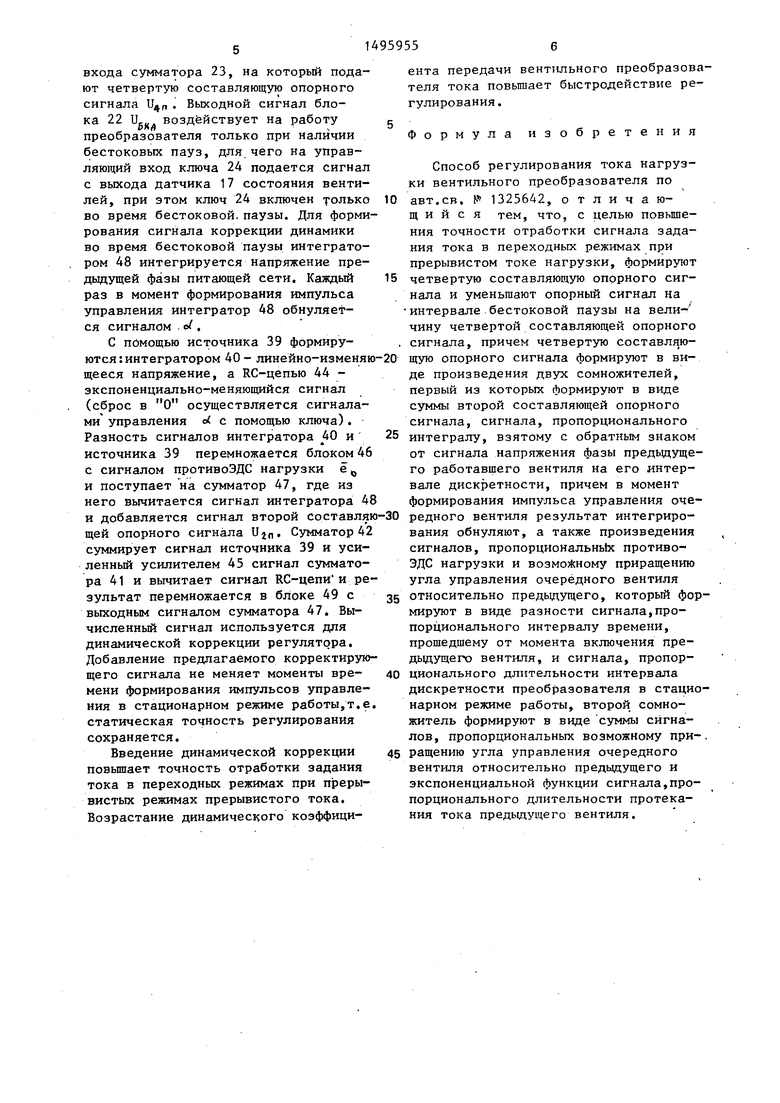
ограничения углов управления,- на фиг.З - блок коррекции динамики.
Устройство для реализации способа управления содержит датчики 1-3 напряжения сети, подключенные к соответствующим входам сумматоров 4-6.Интеграторы 7-9 входами сброса соединены с вькодами блока 10 управления сбросом интеграторов, выходами - с входами коммутатора 11. Коммутатор 12 соединен с первыми входами блока 13 ограничения углов управления.
СД СО СД
О
М
3Н9
Компаратор 1A с суммирующими входами подключен к источнику 15 задающего сигнала и датчику 16 противоЭДС нагрузки. Датчик 17 состояния вентилей соединен с входами функциональных преобразователей 18 и 19, к выходу функционального преобразователя 18 подключен блок 20 перемножения.Выход распределителя 21 импульсов соединен с входами коммутаторов 11 и 12.Вьрсод блока 22 коррекции динамики соединен с входом сумматора 23 через ключ 24. Блок 13 (фиг.2) содержит коммутатор 25 аналоговых сигналов, подключенный к входам двух компараторов 26 и 27 и триггера Шмитта 28, выходы которых подключены к входам элементов НЕ 29 и 30 и элементов И 31 и 32.Вы
ходы элементов 26-28 соединены с вхо-20нал d блока 13 распределяется расдами элементов 29-31 через ограничи-пределителем 21 на необходимый вентели 33-35 напряжения. Входы элемен-тиль преобразователя (V ,,,7) .Одна
тов НЕ 36 и 2-2-311/ЗИНЕ 37 объеди-из других составляющих опорного
нены. Выход элемента 2-2-ЗИ/ЗИЛИ 37|Напряжения U формируется с помощью
подключен к входу формирователя 38 им-25функционального преобразователя 19 из
7-9 осу11 ; ствляется коммутатором 1 1 по соответствующим сигналам распределителя 21, определяющего порядок работы вентилей преобразователя.Выходной опорный сигнал выхода сумматора 23 поступает на компаратор 14, где сравнивается с сигналом управления U, представляющим собой О сумму Сигнала задания U, с выхода блока 15 и сигнала противоЭДС нагрузки с выхода датчика 16 (ё).
В момент сравнения указанных сигналов происходит переключение компаратора. Выходной сигнал компарато- рд 14, пройдя через блок 13, преобразуется в импульс управления очередным вентилем преобразователя, углом, ограниченным в блоке 13.Выходной сиг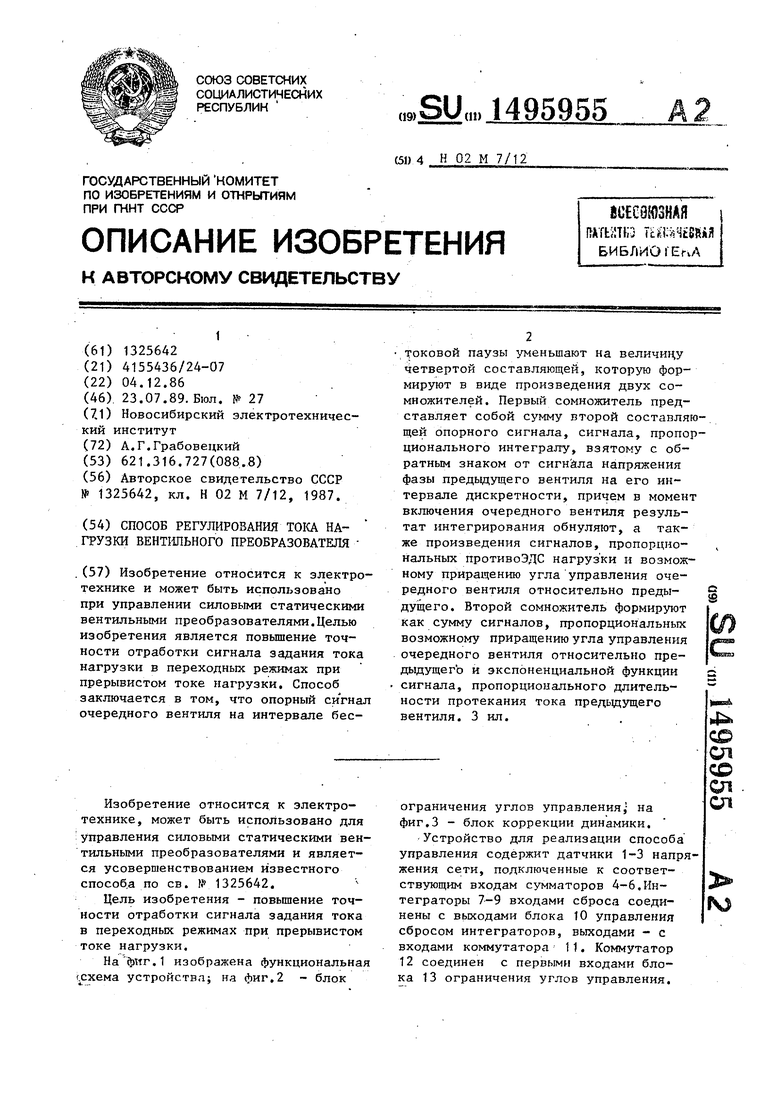
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования тока нагрузки вентильного преобразователя | 1987 |
|
SU1427525A1 |
| Способ упреждающего управления вентильным преобразователем | 1984 |
|
SU1288858A1 |
| Способ управления непосредственным преобразователем частоты с естественной коммутацией | 1988 |
|
SU1617568A1 |
| Устройство для фазового управления вентильным преобразователем | 1982 |
|
SU1026281A2 |
| Способ регулирования тока нагрузки вентильного преобразователя | 1985 |
|
SU1325642A1 |
| Способ управления вентильным преобразователем | 1984 |
|
SU1264278A1 |
| Способ управления непосредственным преобразователем частоты | 1987 |
|
SU1513588A1 |
| Способ управления вентильным преобразователем с шунтирующим вентилем | 1986 |
|
SU1398052A1 |
| Устройство для управления вентильным преобразователем | 1985 |
|
SU1277319A1 |
| Устройство для управления @ -фазным реверсивным вентильным преобразователем | 1989 |
|
SU1837378A1 |
Изобретение относится к электротехнике и может быть использовано при управлении силовыми статическими вентильными преобразователями. Целью изобретения является повышение точности отработки сигнала задания тока нагрузки в переходных режимах при прерывистом токе нагрузки. Способ заключается в том, что опорный сигнал очередного вентиля на интервале бестоковой паузы уменьшают на величину четвертой составляющей, которую формируют в виде произведения двух сомножителей. Первый сомножитель представляет собой сумму второй составляющей опорного сигнала, сигнала, пропорционального интегралу, взятому с обратным знаком от сигнала напряжения фазы предыдущего вентиля на его интервале дискретности, причем в момент включения очередного вентиля результат интегрирования обнуляют, а также произведения сигналов, пропорциональных противоЭДС нагрузки и возможному приращению угла управления очередного вентиля относительно предыдущего. Второй сомножитель формируют как сумму сигналов, пропорциональных возможному приращению угла управления очередного вентиля относительно предыдущего и экспоненциальной функции сигнала, пропорционального длительности протекания тока предыдущего вентиля. 3 ил.
пульсов.
Блок 22 (фиг.З) содержит источник 39 постоянного сигнала смещения, выход которого подключен к входам интегратора 40 со сбросом и сумматором 41 и 42 и через ключ 43 и RC-цеп 44 к входу сумматора 42. Выход сумматора -41 подк.гаочен к входам усюти- теля 45 и блока 46 перемножения,выход которого подключен к одному из входов сумматора 47, к другому входу которого подключен интегратор 48 со сбросом,а к выходу - блок 49 перемножения .
Устройство работает следующим образом.
Напряжение фаз сети е,
bc
согласов1-.шается с сигналами устройства датчиками 1-3. Выходные сигналы е
о
Ч
е датчиков 1-3 поступают на входы сумматоров 4-6 и блока 10 управления сбросом интеграторов.Сигналы с вьЕСода сумматоров 4-6, пропорциональные линейным ,напряжениям питающей сети, интегрируются интеграторами 7-9 и через коммутатор 11 по- ступают на первый вход сумматора 23 как одна из (U) составляю п 1х опорного сигнала. Блок 10 обеспечивает формирование начальных состояний ин- теграторои 7-9 по сигналам с датчиков 1-3. Вмбор в качестве одной ия составляющих опорного сигнала выходного сигнала одного из интеграторов
30
40
напряжения соответствующей фазы сети (е.), выбираемой с помощью коммутатора 12 по сигналам распределителя 21 (SpijSj,,, Sc) . Функциональный преобразователь 19 управления сигналами импульсов управления d датчика 17 состояния вентилей. Третья составляющая опорного сигнала Уд„фор- мируется путем перемножения сигнала 35 датчика 16 и функционального преобразователя IB, формирующего сигнал и, по сигналам блока 13 и датчика 17.
Б блоке 13 ограничения углов управления (фиг.2) сигнал S с помощью элементов НЕ 36 и 2-2-3/ЗИЛИ 37 ограничивается по времени существования. Область углов, в которых разрешено формировать импульс управления очередным вент1-шем, задается компараторами 26 и 27, триггером 28,элементами НЕ 29 и 30,и элементами И 31 и 32 из сигналов датчика напряжения сети, причем комг-гутатор 25 выбирает тек5тцу1о фазу сети, коммутатор 12 пре- дыдугс ю. Согласование сигналов компараторов 26 и 27 и триггера 28 осуществляется с помощью ограничителей 33-35. Выходной сигнал Vp управления: с выхода элемента 2-2-3/ЗИЛИ 37 формируется в короткий импульс формирователем 38.
Отличительные признаки предлагаемого устройства реализуются с помощью блока 22, ключа 24 и четвертого
45
50
55
входа сумматора 23, на который подают четвертую составляющую опорного сигнала Ujj . Выходной сигнал блока 22 и воздействует на работу преобразователя только при наличии бестоковых пауз, для чего на управляющий вход ключа 24 подается сигнал с выхода датчика 17 состояния вентилей, при этом ключ 24 включен только во время бестоковой, паузы. Для формирования сигнала коррекции динамики во время бестоковой паузы интегратором 48 интегрируется напряжение предыдущей фазы питающей сети. Каждый раз в момент формирования импульса управления интегратор 48 обнуляется сигналом . о.
С помощью источника 39 формируются: интегратором 40 - линейно-изменяю-20 щую опорного сигнала формируют в вищееся напряжение, а RC-цепью 44 - экспоненциально-меняющийся сигнал (сброс в О осуществляется сигналами управления о с помощью ключа) . Разность сигналов интегратора j40 и источника 39 перемножается блоком 46 с сигналом противоЭДС нагрузки ё и поступает на сумматор 47, где из него вычитается сигнал интегратора 48
де произведения двух сомножителей, первый из которых формируют в виде суммы второй составляющей опорного сигнала, сигнала, пропорционального 25 интегралу, взятому с обратным знаком от сигнала напряжения фазы предьвдуще го работавшего вентиля на его интервале дискретности, причем в момент формирования импульса управления оче
и добавляется сигнал второй составляю-30 редного вентиля результат интегриро- щей опорного сигнала и2п« Сумматор 42 вания обнуляют, а также произведения суммирует сигнал источника 39 и усиленный усилителем 45 сигнал сумматора 41 и вычитает сигнал RC-цепи и результат перемножается в блоке 49 с выходным сигналом сумматора 47, Вычисленный сигнал используется для динамической коррекции регулятора. Добавление предлагаемого корректирую40
щего сигнала не меняет моменты времени формирования импульсов управления в стационарном режиме работы,т.е. статическая точность регулирования сохраняется.
Введение динамической коррекции повьщ1ает точность отработки задания тока в переходных режимах при прерывистых режимах прерывистого тока. Возрастание динамического козффицисигналов, пропорциональньЬс противоЭДС нагрузки и возможному приращению угла управления очерёдного вентиля
35 относительно предыдущего, который фор мируют в виде разности сигнала,пропорционального интервалу времени, прошедшему от момента включения пре- дьщущепо вентиля, и сигнала, пропорционального длительности интервала дискретности преобразователя в стацио нарном режиме работы, второй сомножитель формируют в виде суммы сигналов, пропорциональных возможному при46 ращению угла управления очередного вентиля относительно предыдущего и экспоненциальной функции сигнала,пропорционального длительности протекания тока предыдущего вентиля.
ента передачи вентильного преобразователя тока повышает быстродействие регулирования .
Формула изобретения
Способ регулирования тока нагрузки вентильного преобразователя по авт.св. fs 1325642, отличающийся тем, что, с целью повышения точности отработки сигнала задания тока в переходных режимах при прерывистом токе нагрузки, формируют четвертую составляющую опорного сигнала и уменьшают опорный сигнал на интервале бестоковой паузы на вели- чину четвертой составляющей опорного сигнала, причем четвертую составляюде произведения двух сомножителей, первый из которых формируют в виде суммы второй составляющей опорного сигнала, сигнала, пропорционального интегралу, взятому с обратным знаком от сигнала напряжения фазы предьвдуще- го работавшего вентиля на его интервале дискретности, причем в момент формирования импульса управления очередного вентиля результат интегриро- вания обнуляют, а также произведения
сигналов, пропорциональньЬс противоЭДС нагрузки и возможному приращению угла управления очерёдного вентиля
относительно предыдущего, который формируют в виде разности сигнала,пропорционального интервалу времени, прошедшему от момента включения пре- дьщущепо вентиля, и сигнала, пропорционального длительности интервала дискретности преобразователя в стационарном режиме работы, второй сомножитель формируют в виде суммы сигналов, пропорциональных возможному при.
ращению угла управления очередного вентиля относительно предыдущего и экспоненциальной функции сигнала,пропорционального длительности протекания тока предыдущего вентиля.
SfeSjSc
Ф14в.1
0if2.3
(7
| Способ регулирования тока нагрузки вентильного преобразователя | 1985 |
|
SU1325642A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
