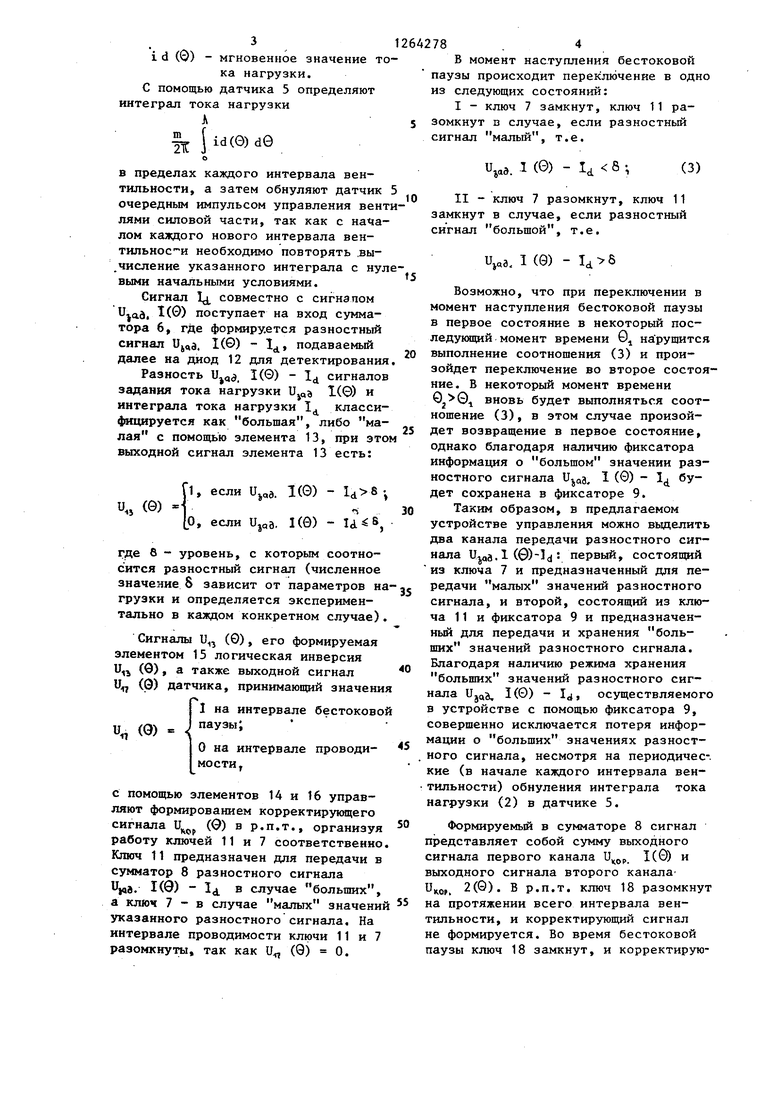
Изобретение относится к электротехнике и может быть использовано х в системах управления вентильных преобразователей. Целью изобретения является повышение надежности работы вентильного преобразователя. На фиг. 1 приведена структурная схема устройства, реализующего пред ложенный способ; на фиг.2 - диаграм мы, поясняющие его работу. Устройство для реализации способ управления вентильным преобразовате лем содержит последовательно включе ные сумматор 1, блок 2 импульснофазового управления с косинусоидаль ным опорным напряжением, блок 3 вен тильного преобразователя, двигатель 4 постоянного тока. Датчик 5 среднего значения тока соединен с входом сумматора 6, ключ 7 соединен с сумматором 8, фиксатор 9 нулевого порядка, в состав которого входят конденсатор 10 и ключ 11, соединен с выпрямителем 12, элемент 13 с зоной нечувствительности соединен с задним из входов элемента И 14, эле мент НЕ 15, элемент И 16, датчик 17 состояния вентилей, подключенный к ключу 18 режима и датчик 19 ЭДС двигателя, соединенный с входом сум матора 1. Устройство работает следующим об разом. В режиме непрерывного тока нагрузки (р.н.т.) на входы сумматора поступают сигналы задания Ujaa- (0) начальной установки 3„ к единичной положительной обратной связи по противоЭДС цепи нагрузки и„. Е (0). Из соотношения для цепи нагрузки UA Е -1- 1а -К , где и - среднее за интервал вентиль ности значение выходного на пряжения ВП; 1, - среднее за интервал вентиль ности значение тока нагрузки;-противоЭДС цепи нагрузкиj -сопротивление нагрузки, видно, что введение сигнала Uyn, Е приводит к тому, что сигнал задания определяет только средний за интервал вентильности ток нагрузки и, следовательно, в дальнейшем может рассматриваться как сигнал заДания тока нагрузки и обозначаться как Ujod (в), а величина противоЭДС цепи нагрузки задается сигналом , Е. Таким образом,влияние противоЭДС цепи нагрузки на статическую характеристику преобразователя совершенно исключается, что существенно улучшает качество линеаризации названной характеристики. Ввиду того, что практически удобнее иметь прямую функциональную зависимость между поступающим извне в устройство сигналом задания тока нагрузки . Т(в) и током нагрузки li (т.е. с увеличением значения сигнала . 1(в) связьшать увеличение тока нагрузки 1) и опорное напряжение Uo, (8) СИФУ 2 носит возрастающий характер, на один из входов сумматора 1 подан сигнал начальной установки Up.представляющий собой постоянную составлякнцую противоположной полярности, чем полярность сигнала Ujaa. I (в) в выпрямительном режиме работы преобразователя, и являющийся, таким образом, начальным уровнем сигнала задания тока нагрузки Uj,a 1(0). Следовательно, в реж1ме непрерьшного тока нагрузки в состав фор- мируемого на выходе сумматора 1 сигнала управления Uynp. О) в качестве слагаемых вводятся сигналы начальной установки Uo, задания тока нагрузки Ujad. (€) и единичной положительной обратной связи по противоЭДС цепи нагрузки Uynt, Е(0). Сигнал управления (О) поступает далее на вход СИФУ 2, где преобразуется в последовательность импульсов управления вентилями силовой части блока 3. В цепи двигателя 4 постоянного тока, являющегося нагрузкой блока 3, протекает ток нагрузки, среднее за интервал вентильности значение IA которого выражается следующим образом: i (e).d0, (2) где в u)ot текущее время в угловых единицах; t - текущее время в абсолютных единицах; Л - длительность интервала проводимости в угловых единицах i d (.У) - мгновенное значение ка нагрузки. С помощью датчика 5 определяют интеграл тока нагрузки в пределах каждого интервала вентильности, а затем обнуляют датчик очередным импульсом управления вент лями силовой части, так как с началом каждого нового интервала вентильнос и необходимо повторять .вы.числение указанного интеграла с нул выми начальными условиями. Сигнал совместно с сигналом , 1(0) поступает на вход сумматора 6, где формируется разностный сигнал . 1(0) - 1, подаваемый далее на диод 12 для детектирования Разность . К©) - Id сигналов задания тока нагрузки U,(,a 1(Э) и интеграла тока нагрузки i классифицируется как большая, либо малая с помощью элемента 13, при это выходной сигнал элемента 13 есть: П, если и. „а. КЭ) - , и., (©) Н О, если Ujoa. Кв) - где в - уровень, с которым соотносится разностный сигнал (численное значение 8 зависит от параметров на грузки и определяется экспериментально в каждом конкретном случае). Сигналы и, (0), его формируемая злементом 15 логическая инверсия п (®) 3 также выходной сигнал и (0) датчика, принимающий значения I на интервале бестоковой паузы; О на интервале проводимости. с помощью элементов 14 и 16 управляют формированием корректирукицего сигнала Ц в р.п.т., организуя работу ключей 11 и 7 соответственно Ключ 11 предназначен для передачи в сумматор 8 разностного сигнала I(Q) Id в случае больших, а ключ 7 - в случае малых значений указанного разностного сигнала. На интервале проводимости ключи 11 и 7 разомкнуты, так как U, (9) 0. 264278 В момент наступления бестоковой паузы происходит переключение в одно из следующих состояний: I - ключ 7 замкнут, ключ 11 разомкнут в случае, если разностный 5 сигнал малый, т.е. - , II - КЛЮЧ 7 разомкнут, ключ 11 замкнут в случае, если разностный сигнал большой, т.е. - Возможно, что при переключении в момент наступления бестоковой паузы в первое состояние в некоторый последуюпщй момент времени 0 нарушится выполнение соотношения (3) и произойдет переключение во второе состояние. В некоторый момент времени Q, J J вновь будет выполняться соотношение (3), в этом случае произойдет возвращение в первое состояние, однако благодаря наличию фиксатора информация о большом значении раз- 1 буностного сигнала U дет сохранена в фиксаторе 9. Таким образом, в предлагаемом устройстве управления можно выделить два канала передачи разностного сигнала Цу,в. 1 (0)-ld первый, состоящий из ключа 7 и предназначенный для передачи малых значений разностного сигнала, и второй, состоящий из ключа 1 1 и фиксатора 9 и предназначенный для передачи и хранения больших значений разностного сигнала. Благодаря наличию режима хранения больших значений разностного сигнала Ujaa, 1(0) Ijj осуществляемого в устройстве с помощью фиксатора 9, совершенно исключается потеря информации о больших значениях разностного сигнала, несмотря на периодические (в начале каждого интервала вентильности) обнуления интеграла тока нагрузки (2) в датчике 5. Формируемый в сумматоре 8 сигнал редставляет собой сумму выходного сигнала первого канала 1(0) и ыходного сигнала второго канала KOP. 2(Q). В р.п.т. ключ 18 разомкнут на протяжении всего интервала вентильности, и корректирующий сигнал не формируется. Во время бестоковой паузы ключ 18 замкнут, и корректирующий сигнал и,
фop шpyют слеM)f
дующим образом: в случае большой разности сигналов задания тока нагрузки Ujq3 I(Q) и интеграла тока нагрузки Id выпрямленный разностный сигнал (Ujad. К©) Id фиксируют До следующего большого значения и используют в качестве корректирующего сигнала U 2(0) в течение бестоковой паузы; в случае малой разности сигналов задания тока нагрузки . 1(9) и интеграла тока нагрузки Ij текущее значение малого разностного сигнала U, I °° Кб) - la, суммируют с зафиксированным ранее большим разностным сигналом и формируют корректирующий сигнал в течение бестоковой паузы, т.е. и„. U,, 1 2.
Применение предлагаемого способа управления преобразователем позволяет линеаризовать статическую характеристику преобразователя в р.п.т., исключает периодическую потерю информа1щи о корректировке сигнала управления и, следовательно, возникновение колебаний на основной субгармонике, что позволяет добиться высоконадежной и качественной линеаризации статической характеристики ВП при любых параметрах нагрузки и уровне противоЭДС цепи нагрузки. Указанный способ управления ВП целесообразно применять в системах управления электроприводами подач тяжелых металлорежущих ст&ков, так как это облегчает их оптимизацию и дает значительный экономический эффект при внедрении в производство.
Формула изобретения Способ управления вентильным преобразователем с арккосинусоидальной характеристикой блока импульсно-фаJ зового управления, заключающийся в том, что определяют интеграл тока нагрузки в течение каждого интервала вентильности, формируют сигнал, пропорциональный указанному интег0 ралу, обнуляют сигнал очередным
I
импульсом управления вентилями преобразователя, из указанного сигнала формируют корректирующий сигнал и суммируют его с сигналом
5 управления, отличающийся тем, что, с целью повышения надежности работь вентильного преобразователя, в зоне прерывистых токов нагрузки сигнал управления форми0 Руют путем суммирования сигнала начальной уставки, формируемой в виде неизменного сигнала, сигнала задания тока нагрузки, формируемого в виде переменного сигнала и сигна5 ла, соответствующего противоЭДС нагрузки, вычисляют разность между сигналом задания тока нагрузки и интеграла тока нагрузки, формируют пороговый сигнал, определяют ин0 тервал отсутствия тока в нагрузке, если указанная разность больше порогового сигнала, то она запоминается и используется в качестве корректируняцего сигнала до следующе, го ее превьшения над пороговым сигналом, если указанная разность меньше порогового сигнала, то корректирующий сигнал дополнительно увеличивается на указанную разность.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования тока нагрузки вентильного преобразователя | 1986 |
|
SU1495955A2 |
| Способ определения среднего значения напряжения двухфазного вентильного преобразователя | 1981 |
|
SU1157630A1 |
| Устройство для управления вентильным преобразователем | 1985 |
|
SU1277319A1 |
| Способ упреждающего управления вентильным преобразователем | 1984 |
|
SU1288858A1 |
| Способ управления вентильным преобразователем с непосредственной связью и естественной коммутацией в режиме прерывистого тока | 1982 |
|
SU1022282A1 |
| Способ управления вентильным преобразователем | 1976 |
|
SU572892A2 |
| Способ управления вентильным преобразователем | 1982 |
|
SU1083322A1 |
| Вентильный электропривод постоянного тока | 1985 |
|
SU1372567A1 |
| Устройство для фазового управления вентильным преобразователем | 1982 |
|
SU1026281A2 |
| Устройство для импульсно-фазового управления @ -фазным преобразователем | 1987 |
|
SU1610566A1 |
Изобретение относится к электротехнике и может быть использовано для у11равления вентильными преобразователями. Целью изобретения является повышение надежности. В режиме прерывистого тока во время бестоковой паузы ключ 18 замкнут и корректирующий сигнал формируется следующим образом: в случае большой разности сигналов задания тока нагрузки и интервала тока нагрузки выпрямленный разностный сигнал фиксируют до следующего большого значения и используют в качестве корректирующего сигнала в течение бестоковой паузы, в случае малой разности сигналов задания тока нагрузки и интеграла тока нагрузки текущее § значение малого разностного сигнала суммируют с зафиксированным ранее (Л большим разностным сигналом и формируют корректирующий сигнал в течение бестоковой паузы. 2 ил. Ю
| ,/ торское свидетельство СССР № 525224, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления вентильным преобразователем | 1978 |
|
SU921026A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
