I
i
3
ei.j
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с частотно-токовым управлением | 1990 |
|
SU1742974A1 |
| Измеритель мощности ультразвуковых технологических генераторов | 1986 |
|
SU1406501A1 |
| Преобразователь угла поворота вала в код | 1988 |
|
SU1580556A1 |
| Вентильный электродвигатель | 1989 |
|
SU1670753A2 |
| Устройство для определения углового положения вала двухфазного синхронного двигателя с магнитной асимметрией ротора | 1988 |
|
SU1640808A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1991 |
|
RU2007027C1 |
| Датчик положения ротора | 1979 |
|
SU817895A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU732954A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU866570A1 |
| Преобразователь угловых перемещений в код | 1978 |
|
SU743002A1 |

Изобретение относится к электротехнике. Целью изобретения является расширение функциональных возможностей устройства путем обеспечения формирования N многофазных управляющих сигналов с раздельно задаваемыми амплитудами. Устройство снабжено N = канальным мильтиплексором (М) 6 и формирователем импульсов 7. Формирователь 2 управляющих сигналов и каждый фазочувствительный выпрямитель (ФВ) 4 и 5 выполнены N = канальными. Вход формирователя импульсов 7 подключен к выходу генератора 1 прямоугольных импульсов, а выходы - к управляющим входам ФВ 4 и 5 и М 6. Выход М 6 соединен с входной обмоткой индуктивного датчика 3 углового положения, а информационные входы М 6 - с соответствующими выходами формирователя 2. Основной вход каждого ФВ 4 и 5 подключен к соответствующей выходной обмотке датчика 3. На выходах каждого из M ФВ 4 и 5 формируется N сигналов, мгновенное значение зависит от углового положения ротора датчика 3. Амплитуда сигнала равна соответствующему напряжению с выхода формирователя 2. 5 ил.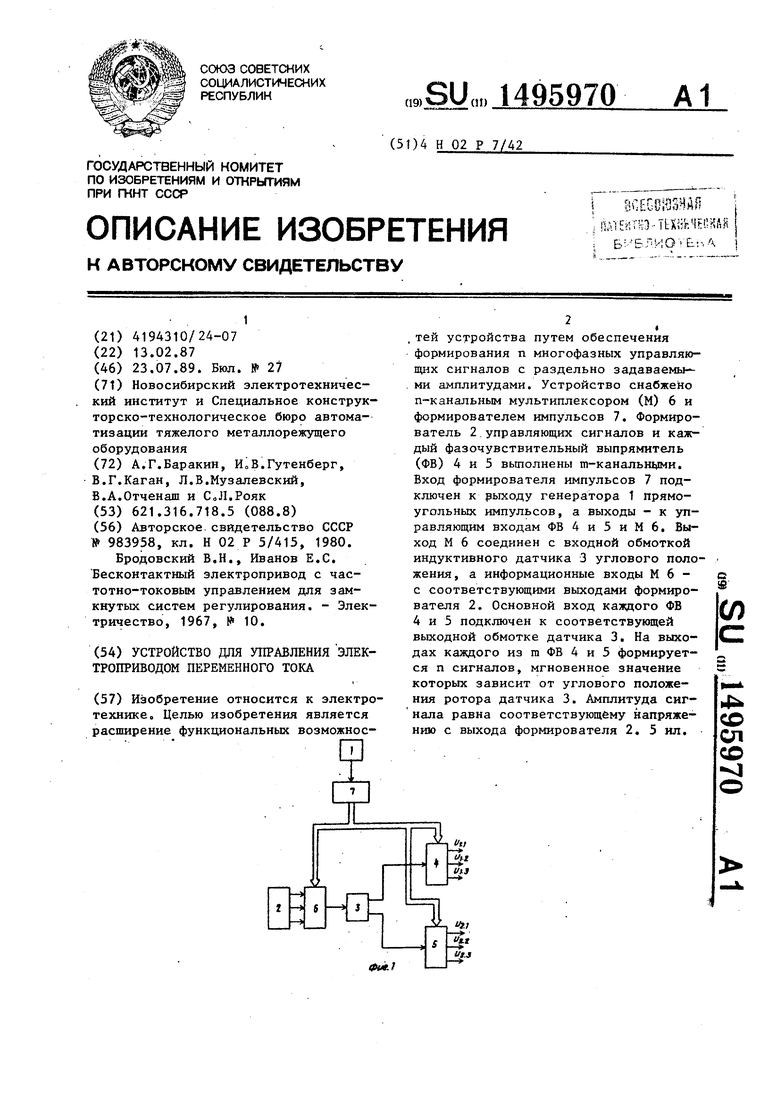
uj.i
г
tti.i
Изобретение относится к электротехнике и может быть использовано для управления электроприводом переменного тока, построенном, например, на основе синхронного двигателя. Цель изобретения - расширение функциональных возможностей путем обеспечения формирования п многофазных управляющих сигналов с ра.здель- но задаваемыми амплитудами.
На фиг.1 приведена функциональная схема устройства управления электроприводом переменного тока; на фиг.2 - функциональная схема трехканального формирователя управляющих сигналов и принципиальная схема трехканальног мультиплексора; на фиг.З и 4 - принципиальные схемы трехканальнсго фазо чувствительного выпрямителя и блока управления; на фиг.З - эпюры, поясняющие работу устройства(число каналов п равно трем, а число выходных обмоток индуктивного датчика положения m равно двум).
Устройство для управления электроприводом переменного тока содержит генератор 1 прямоугольных импульсов (фиг.1), формирователь 2 управляющих сигналов, индуктивный датчик 3 угло- вого положения с входной обмоткой-и т-выходными обмотками и га-фазочувст- вительных выпрямителей 4 и 5, вход каждого из которых подключен к соответствующей выходной обмотке индук- тивного датчика 3 углового положения
В устройство введены п-канальный мультиплексор 6 и формирователь 7 импульсов, а формирователь 2 управляющих сигналов и каждый из фазо- чувствительных вьтрямителей 4 и 5 выполнены п-канальньии. При этом вход формирователя импульсов 7 подключен к выходу генератора 1 прямоугольных импульсов, а выходы - к соответствую щим управляющим входам фазочувстви- тельных выпрямителей 4 и 5 и мультиплексора 6. Входная обмотка индуктивного датчика 3 углового положения .подключена к выходу мультиплексора 6, соединенного информационными входами с соответствующими выходами формирователя 2 управляющих сигналов
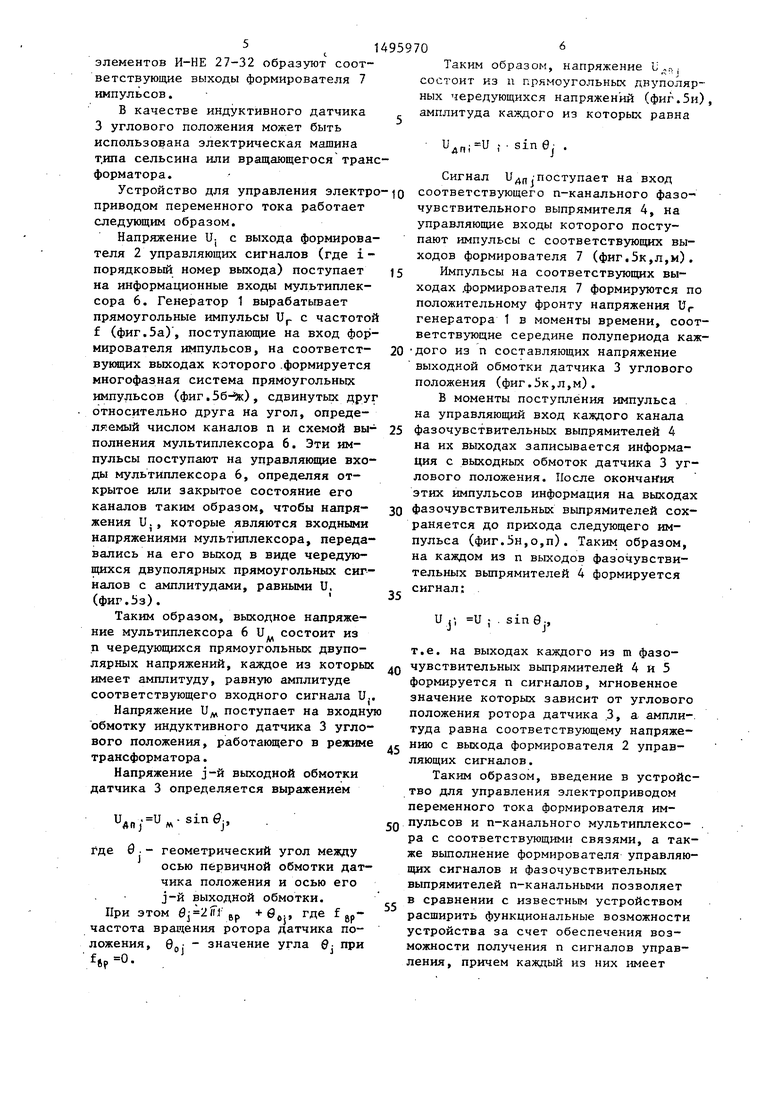
Формирователь 2 управляющих сигналов может содержать источник 8 опорного напряжения (фиг.2), регулятор 9 частоты вращения , к суммирующим входам которого подключены выходы задатчика 10 частоты вращения
5
5
0 5
40 45 Q
55
и бесконтактного тахогенератора, состоящего, из последовательно соединенных измерительного синхронного генератора 11 с трапецеидальной формой выходного напряжения и коммутатора 12, ключи которого замыкаются в функции углового положения роторас Причем задатчик 10 частоты вращения и источник 8 опорного напряжения могут представлять собой потенциометры, подключенные к шинам питания элементов устройства. Выходы регулятора 9 частоты вращения, коммутатора 12 и источника 8 опорного напряжения образуют выходы формирователя 2 управляющих сигналов.
Мультиплексор 6 может быть выполнен с коммутатором 13 (фиг.2) и операционным усилителем 14. Управляющий вход мультиплексора 6 образован управляющими входами кл - (ей коммутатора 13, а выход - выходом операционного усилителя 14.
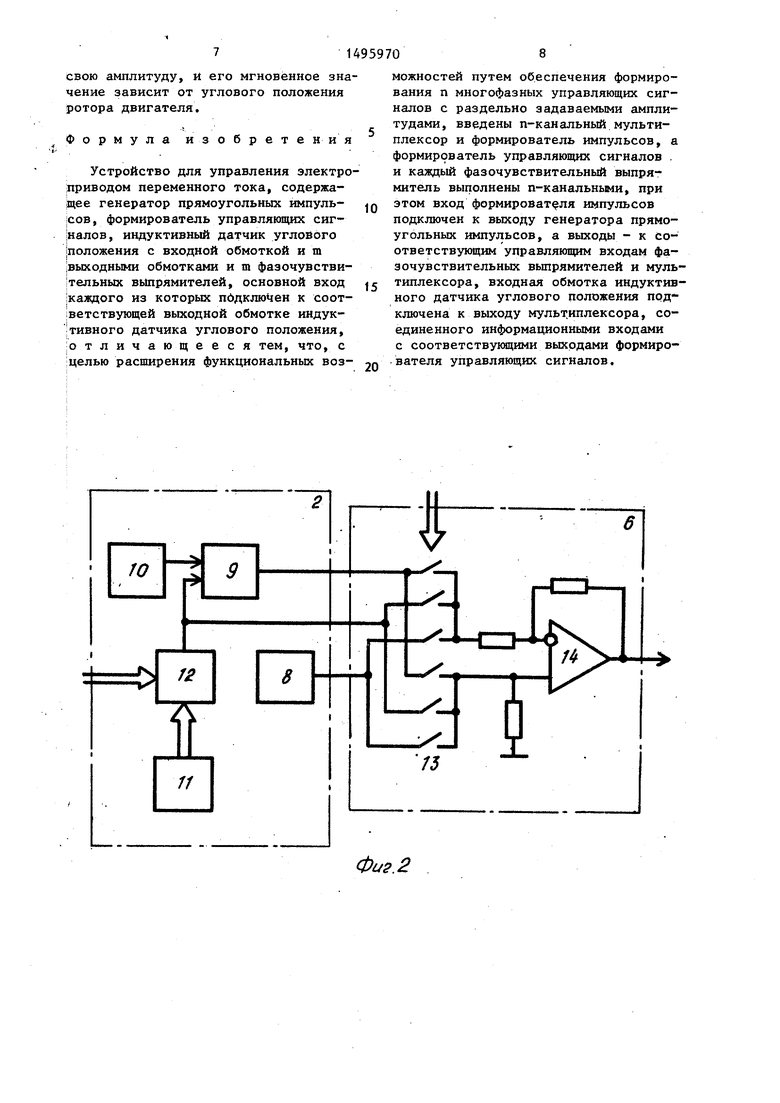
Каждый из п-канальньк фазочувстви- тельных выпрямителей 4 и 5 может содержать п устройств выборки и хранения, выполненных с использованием операционных усилителей 15-17 (фиг.З), конденсаторов 18-20 и управляемых ключей 21-23, одни выводы которых объединены с выводами соответствукицих конденсаторов 18-20 и подключены к инвертирующим входам соответствующих операционных усилителей t5-17. Другие выводы управляемых ключей 21-23 объединены между собой и образуют основной вход фазочувствительного выпрямителя 4 (5) , Управлянщие входы фазочувствительного выпрямителя 4(5) образованы управляющими входами ключей 21-23.
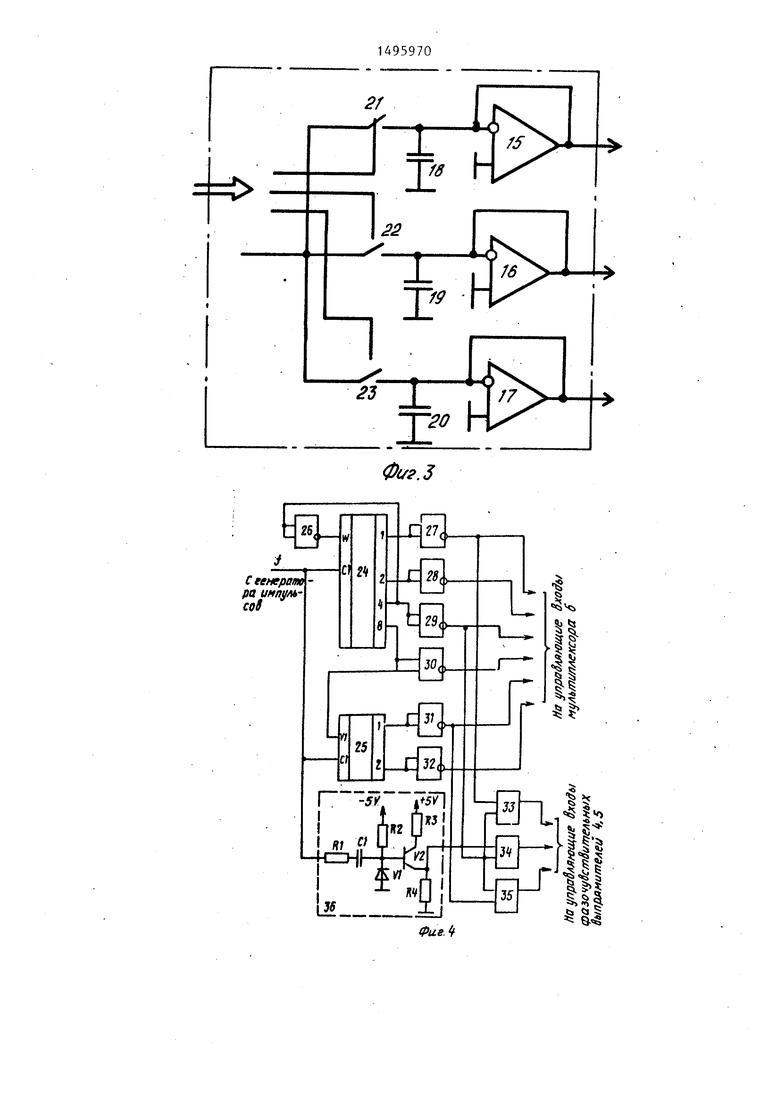
Формирователь 7 импульсов может быть выполнен на основе серийно выпускаемых цифровых микросхем, например, регистров 24 и 25 (фиг.4), работающих в режиме сдвига, элементов И-НЕ 26-32, элементов И 33-35. Формирователь содержит, кроме того, транзисторную ячейку 36, вход которой объединен с входами регистров 24 и 25 и образует вход формирователя 7 импульсов. Регистры 24 и 25 соответствующими входами-выходами связаны с элементами И-НЕ 26-32. Выходы элементов И-НЕ 27, 29 и 31 и вькод транзисторной ячейки 36 подключены к входам соответствующих элементов И 33-35, выходы которых и выходы
элементов И-НЕ 27-32 образуют соответствующие выходы формирователя 7 импульсов.
В качестве индуктивного датчика 3 углового положения может быть использована электрическая машина т,ипа сельсина или вращающегося трансформатора.
Устройство для управления электро приводом переменного тока работает следующим образом.
Напряжение U, с выхода формирователя 2 управляющих сигналов (где i- порядковый номер выхода) поступает на информационные входы мультиплексора 6. Генератор 1 вырабатьшает прямоугольные импульсы Up с частотой f (фиг.За), поступающие на вход формирователя импульсов, на соответст- вукицих выходах которого .формируется многофазная система прямоугольных импульсов (фиг,56-), сдвинутых друг относительно друга на угол, определяемый числом каналов п и схемой выполнения мультиплексора 6. Эти импульсы поступают на управляющие входы мультиплексора 6, определяя открытое или закрытое состояние его каналов таким образом, чтобы напря
жения V., которые являются входными напряжениями мультиплексора, передавались на его выход в виде чередующихся двуполярных прямоугольных сигналов с амплитудами, равными U. (фиг.Ьз).
Таким образом, выходное напряжение мультиплексора 6 U состоит из п чередующихся прямоугольных двуполярных напряжений, каждое из которых имеет амплитуду, равную амплитуде соответствующего входного сигнала U,.
Напряжение U, поступает на входную обмотку индуктивного датчика 3 углового положения, работающего в режиме трансформатора.
Напряжение j-й выходной обмотки датчика 3 определяется выражением
UAH г м-si j.
Где
0.геометрический угол между осью первичной обмотки датчика положения и осью его j-й выходной обмотки. При этом вр +0ej Я частота вращения ротора датчика по ложения, 0„,- - значение угла
8Рfep o0j при
Таким образом, напряжение Ь ,,,;;,. состоит из п гфямоугольньк днуполяр- ных чередующихся напряжений (фиг.Зи), амплитуда каждого из которых равна
дп,
sin 0
J
Сигнал ид„/поступает на вход соответствующего п-канального фазо-™ чувствительного выпрямителя 4, на управляющие входы которого поступают импульсы с соответствующих выходов формирователя 7 (фиг.5к,л,м). Импульсы на соответствующих выходах .формирователя 7 формируются по положительному фронту напряжения U,- генератора 1 в моменты времени, соответствующие середине полупериода каж- дого из п составляющих напряжение выходной обмотки датчика 3 углового положения (фиг.5к,л,м).
В моменты поступления импульса на управляющий вход каждого канала фазочувствительных выпрямителей 4 на их выходах записывается информация с выходных обмоток датчика 3 углового положения. После окончания этих импульсов информация на выходах фазочувствительных выпрямителей сохраняется до прихода следующего импульса (фиг.5н,о,п). Таким образом, на каждом из п выходов фазочувствительных выпрямителей 4 формируется сигнал:
и
J
и
sin в.,
0
5
0
5
т.е. на выходах каждого из m фазочувствительных вьтрямителей 4 и 5 формируется п сигналов, мгновенное значение которых зависит от углового положения ротора датчика 3, а ампли-. туда равна соответствующему напряжению с выхода формирователя 2 управляющих сигналов.
Таким образом, введение в устройство для управления электроприводом переменного тока формирователя импульсов и п-канального мультиплексо- . ра с соответствующими связями, а также вьтолнение формирователя управляющих сигналов и фазочувствительных выпрямителей п-канальными позволяет в сравнении с известным устройством расширить функциональные возможности устройства за счет обеспечения возможности получения п сигналов управления, причем каждый из них имеет
свою амплитуду, и его мгновенное значение зависит от углового положения ротора двигателя.
Формула изобретения
Устройство для управления электроприводом переменного тока, содержа- (щее генератор прямоугольных импуль- icoB, формирователь управляющих сиг- ;налов, индуктивный датчик углового положения с входной обмоткой и m выходными обмотками и m фазочувстви- 1тельных выпрямителей, основной вход ;каждого из которых пЬдклю 1ен к соот- :ветствующей выходной обмотке индук- тивного датчика углового положения, ;отличающееся тем, что, с |целью расширения функциональных воз-
можностей путем обеспечения формирования п многофазных управляющих сигналов с раздельно задаваемыми амплитудами, введены п-канальный мультиплексор и формирователь импульсов, а формирователь управляющих сигналов . и каждый фазочувствительный выпрямитель выполнены п-канальными, при этом вход формирователя импульсов подключен к выходу генератора прямоугольных импульсов, а выходы - к соответствующим управляющим входам фа- зочувствительных вьшрямителай и мультиплексора, входная обмотка индуктивного датчика углового положения подключена к выходу мульт.иплексора, соединенного информационными входами с соответствующими выходами формирователя управляющих сигналов.
Фиг. 2
Ur
пппппппппппппппппппп шшп
Фш.
| Авторское, свидетельство СССР № 983958, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бродовский В.Н., Иванов Е.С | |||
| Бесконтактный электропривод с частотно-токовым управлением для замкнутых систем регулирования | |||
| - Электричество, 1967, № 10. | |||
