(54) ДАТЧИК ПОЛОЖЕНИЯ РОТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Вентильный электродвигатель | 1983 |
|
SU1108576A1 |
| Вентильный электродвигатель | 1978 |
|
SU785929A1 |
| Вентильный электродвигатель | 1983 |
|
SU1150725A2 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| Вентильный электропривод | 1983 |
|
SU1270858A1 |
| Магнитомодуляционный преобразователь угла | 1980 |
|
SU920365A1 |
| Вентильный электродвигатель | 1985 |
|
SU1261058A1 |
| Вентильный электродвигатель | 1984 |
|
SU1259461A1 |
| Устройство для моделирования @ -фазного вентильного электродвигателя | 1990 |
|
SU1797133A1 |
Изобретение относится к электромеханике, в частности к датчикам положения ротора вентильных электродвигателей с позиционно-зависимой широтно-импульсной Модуляцией фазных напряжений. Известен датчик положения ротора, например, для бесконтактного двигателя постоянного тока с регулированием длительности управляющих импульсов, содержащий на зубцах статора чередующиеся между собой катущки первичной и вторичной абмоток. Катушки первичной обмотки соединены в отдельные группы, раздельно регулируемые по. напряжению, а катушки вторичной обмотки подключены к фазочувствительным демодуляторам 1. Недостатком датчика положения ротора является большая дискретность в измерении углового положения сигнального элемента ротора. Наиболее близким по технической сущности к предлагаемому является магнитомодуляционный датчик углового положения, например, ротора бесконтактного электродвигателя постоянного тока, содержащий индуктивные чувствительные элементы и дополнительные магниты, установленные попарно на статоре с фиксированным углом сдвига, и вращающийся постоянный магнитмодулятор. Датчик снабжен установленным на статоре между чувствительными эл ментами и магнитом-модулятором, управляемым магнитным шунтом, выполненным из четного числа подмагничиваемых во встречных направлениях тороидальных сердечников, несущих обмотки управления 2. Основным недостатком датчика являются его узкие функциональные возможности. Датчик удовлетворительно работает в составе вентильного электродвигателя, обеспечивая плавность вращающего момента электрической машины. В то же время при использовании магнитомодуляционного датчика в качестве источника информации для устройств измерения скорости вращения вентильных электродвигателей вследствие синусоидальности формы огибающей средней составляющей его выходного напряжения возникают значительные пульсации тахометрического сигнала, ограничивающие область применения датчика. Таким образом, к внешней характеристике устройства предъявляются противоречивые требования: а) для вентильного
электродвигателя наилучшей, с трчки зрения получения минимума пульсаций вращающего момента, является синусоидальная форма внещней характеристики; б) для тахометрических устройств форма должна приближаться к пилообразной, позволяющей снизить пульсации тахосигнала.
Цель изобретения - расщирение функциональных возможностей магнитомодуляционного датчика положения ротора.
Указанная цель достигается тем, что датчик положения ротора, например, для вентильного электродвигателя, содержащий магнитомодуляционные чувствительные элементы, обмотки которых через нагрузочные резисторы подключены к выходу усилителя мощности, вход которого соединен с выходом генератора опорной частоты, и сигнальный элемент в виде постоянного магнита, причем резисторы подключены к последовательно соединенным выпрямителям и формирователям, датчик снабжен дополнительно двумя ключами, двумя схемами совпадения, инвертором и дополнительным генератором, выходная частота которого в два раза выше опорной частоты, источник опорной частоты выполнен в виде двух задающих генераторов, один из которых выполнен с возможностью генерирования напряжения прямоугольной формы, а другой - с возможностью генерирования напряжения изменяемой формы вершины импульса, причем ко входу усилителя мощности подключены через два ключа два задающих генератора, одни входы схем совпадения соединены с выходом формирователя, а вторые входы подключены к управляющим входам первого и второго ключа и к выходам последовательно соединенных дополнительного генератора и инвертора.
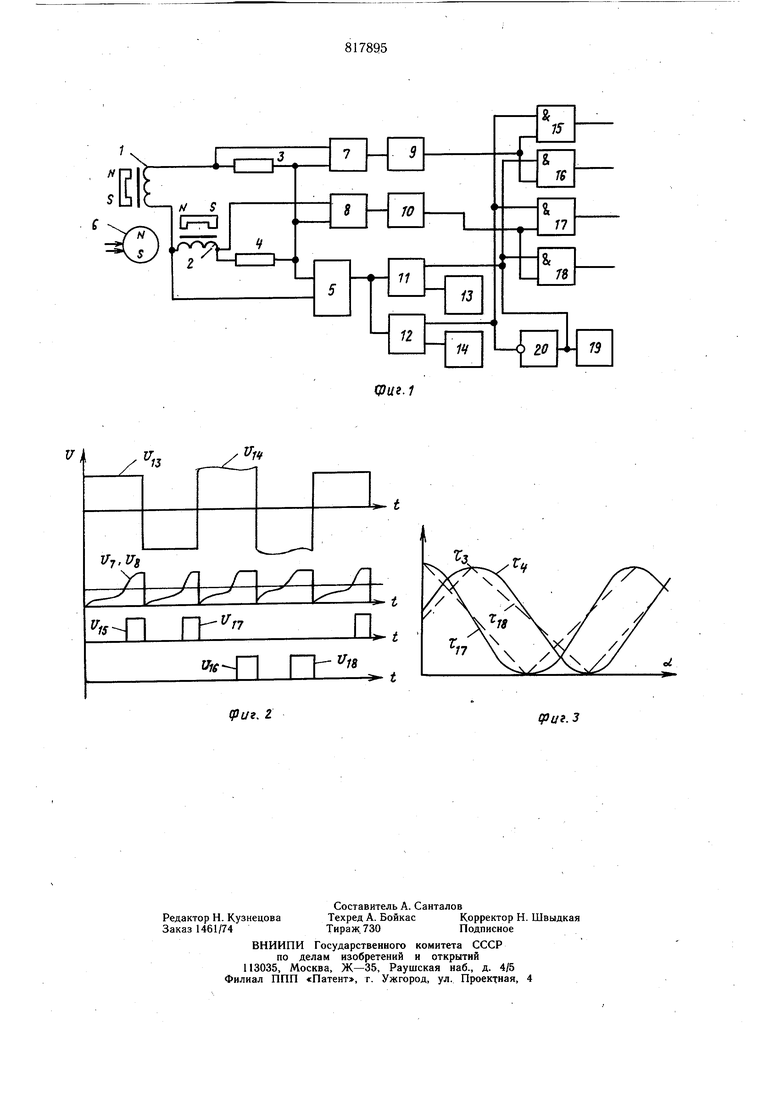
На фиг. 1 приведена функциональная схема устройства; на фиг. 2 - графики, иллюстрирующие принцип работы устройства.
Датчик положения ротора, например, для вентильного электродвигателя, содержит в случае двухфазной конструкции магнитомодуляционные чувствительные элементы 1 и 2, обмотки которых через нагрузочные резисторы 3 и 4 подключены к выходу усилителя 5 мощности, и сигнальный элемент б в виде постоянного магнита, причем нагрузочные резисторы 3 и 4 подключены к последовательно соединенным выпрямителям 7 и 8 и формирователям 9 и 10.
Датчик содержит подключенные через два ключа 11 и 12 ко входу усилителя 5 мощности два задающих генератора 13 и 14, а также в каждой фазе по две схемы совпадения 15, 16 и 17, 18, одни входы которых соединены с выходом формирователя 9 и 10, а вторые входы подключены к управляющим входам первого 11 и второго 12 ключей и к выходам последовательно соединенных дополнительного генератора 19 и инвертоpa 20. Если число фаз датчика больще двух, то в схему добавляются одинаковые каналы, состоящие из последовательно соединенных чувствительного элемента, нагрузочного резистора, выпрямителя и формирователя, к выходу которого подключены первые входы двух схем совпадений, вторые входы которых соединены с выходами дополнительного генератора и инвертора.
При повороте сигнального элемента ротора 6 изменяется степень подмагничивания чувствительных элементов. 1 и 2, что вызывает соответствующие изменения длительности импульсов тока в нагрузочных резисторах 3 и 4. При питании обмоток чувствительных элементов 1 и 2 напряжением прямоугольной формы зависимость относительных длительностей импульсов тока в нагрузочных резисторах 3 и 4 от угла поворота « ротора 6 близка к синусоидальной,, показанной на фиг. 3 линиями TJ, ir, имеющими фазовый сдвиг, соответствующий относительному пространственному расположению чувствительных элементов 1 и 2.
Третий генератор 19 вырабатывает меандр, несущая частота которого вдвое ниже частот генераторов 13 и 14. Через инвертор 20 генератор 19 управляет работой ключей 11 и 12 и схем совпадения 15-18 так, что на одном полупериоде выходного напряжения третьего генератора 19 открыт первый ключ 11 и схемы совпадения 15 и 17. На втором полупериоде открыты второй ключ 12 и схемы совпадения 16 и 18, а схемы 15 и 17 закрыты. Поэтому на первом полупериоде напряжения третьего генератора 19 питание чувствительных элементов осуществляется через усилитель 5 мощности напряжением первого генератора 13, имеющим прямоугольную форму. При этом со схем совпадения 15 и 17 поступают импульсные последовательности V, , V-n, имеющие синусоидальные законы изменения длительности от угла oi. Во втором полупериоде выходного напряжения третьего генератора 19 питание элементов 1 и 2 осуществляется напряжением со специальной формой, и , вырабатываемой вторым генератором 14 В этом случае импульсы поступают с выходов схем совпадения 16 и 18. Форма выходного напряжения второго генератора обеспечивает получение желаемого закона изменения относительно длительности сигналов V|6. Vjg от угла о.Так, например, для повыщения точности устройств измерения скорости вращения вентильного электродвигателя она должна быть линейной, что и достигается в предлагаемой схеме датчика положения путем выбора соответствующей формы изменения вершины импульса напряжения второго генератора 14.
При питании чувствительных элементов 1 и 2 напряжением типа меандр, имеющим плоскую вершину, форма внешней характеристики определяется распределением индукции магнитного поля сигнального элемента - ротора (постоянного магнита) вдоль зазора датчика и зависит от угла, как это показано кривыми fj, этом длительность выходных сигналов датчика V|5 определяется индукцией магнитного поля ротора 6 при его определенном угловом положении. Длительность этих импульсов определяется также вольтсекундной площадью напряжения питания чувствительных элементов i и 2. Так, если вольтсекундная площадка при данном положении ротора постоянн,а, то можно увеличить продолжительность импульсов V(5-, уменьщив амплитуду питания. И, наоборот, при увеличении амплитуды происходит уменьщение длительности сигнала Viy. При повороте ротора 6 происходит уменьщение длительности сигнала Уцг, зависимость которой от угла о( имеет вид синуса TJ, т. е. каждому участку линии -Сз соответствует свой «кусок вдоль верщины импульса питания Vfj. Поэтому, например, там, где синус тГзвыще линииti (т. е. длительность сигнала для линии должна быть меньше), необходимо увеличить амплитуду питания. На участках, где надо увеличить длительность, т. е. поднять реальную характеристику датчика к желаемой, необходимо снизить амплитуду питания.
Итак, для формирования нужной характеристики датчика необходимо определить реальную характеристику, изобразить на том же чертеже желаемую, а затем деформировать верщину импульса питания обратно пропорционально разности между желаемой и реальной характеристиками датчика. Задающий генератор для синусоидальной формы характеристики, как известно, должен генерировать меандр (например, генератор 13). Второй задающий генератор (например 14) должен иметь форму верщины импульса, деформированную в соответствии с методикой, приведенной выще. Так, например, для линейной формы характеристики Vt соответствует форма Ущ.
Форма верщины импульсов генератора 14 может быть произвольной. Все зависит от характеристики, которую надо получить из синуса. Можно, например, получить релейную характеристику при форме напряжения y-iff в виде ступеньки.
В общем случае датчик положения ротора может вырабатывать несколько произвольных законов изменения его выходных импульсов в зависимости от угла поворота о( ротора 6. При этом должно быть соответствующим образом увеличено число задающих генераторов, ключей, схем совпадения, а схема управления работой упомянутых элементов, представленная на фиг. 1, третьим генератором 19 и инвертором, может быть, например, кольцевым распределителем импульсов.
Итак, в схеме датчика положения за счет чередования форм питающих чувствительных элементов напряжения обеспечивается выработка различных законов изменения относительной длительности выходных импульсов в зависимости от угла поворота ротора. Отмеченное новое свойство изобретения позволяет использовать один набор чувствительных элементов для различных целей, например, в качестве датчика положения ротора вентильного электродвигателя, источника информации для устройств измерения скорости упомянутых двигателей и др.
Формула изобретения
0 Датчик положения ротора, например, - для вентильного электродвигателя, содержащий магнитомодуляционные чувствительные элементы, обмотки которых через нагрузочные резисторы подключены к выходу усилителя мощности, вход которого соединен с выходом источника опорной частоты, и сигнальный элемент в виде постоянного магнита, причем нагрузочные резисторы в каждом канале усиления подключены к последовательно соединенным выпрямителям и
0 формирователям, отличающийся тем, что, с целью расщирения функциональных возможностей, он снабжен дополнительно двумя ключами, двумя схемами совпадения на каждый канал усиления инвертором и доцолнительным генератором, выходная
5 частота которого в два раза выще опорной частоты, источник опорной частоты выполнен в виде двух задающих генераторов, один из которых выполнен с возможностью генерирования напряжения прямоугольной формы, а другой - с возможностью генерирования напряжения изменяемой формы верщины импуЛьса, причем ко входу усилителя мощности подключены через два ключа два задающих генератора, одни входы схем совпадения соединены с выходами формирователя, а вторые вхоДы подключены к управляющим входам первого и второго ключа и к выходам последовательно соединенных дополнительного генератора и инвертора.
Источники информации,
принятые во внимание при экспертизе
Уиг.З
