Изобретение относится к .машиностроению, в частности к механизированным транспортным системам (конвейерам) , и может быть использовано при создании непрерывных автоматических линий транспортировки и обработ ки материалов.
Целью изобретения является распш- рение технологических возможностей конвейера
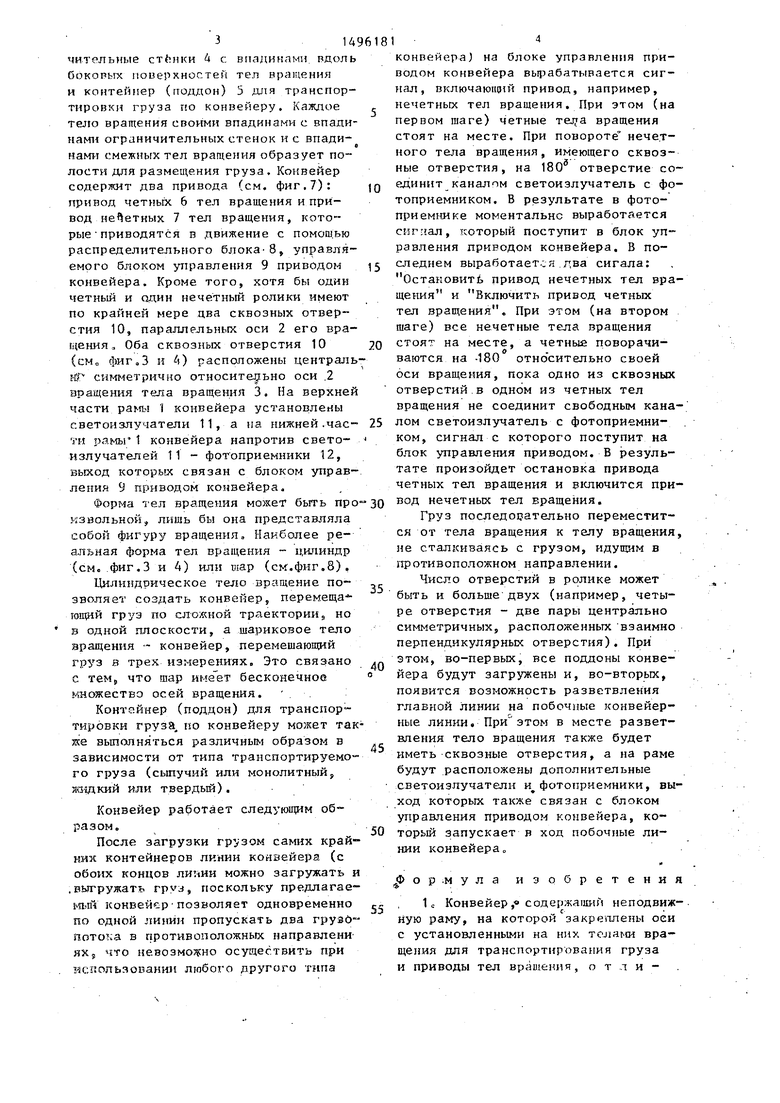
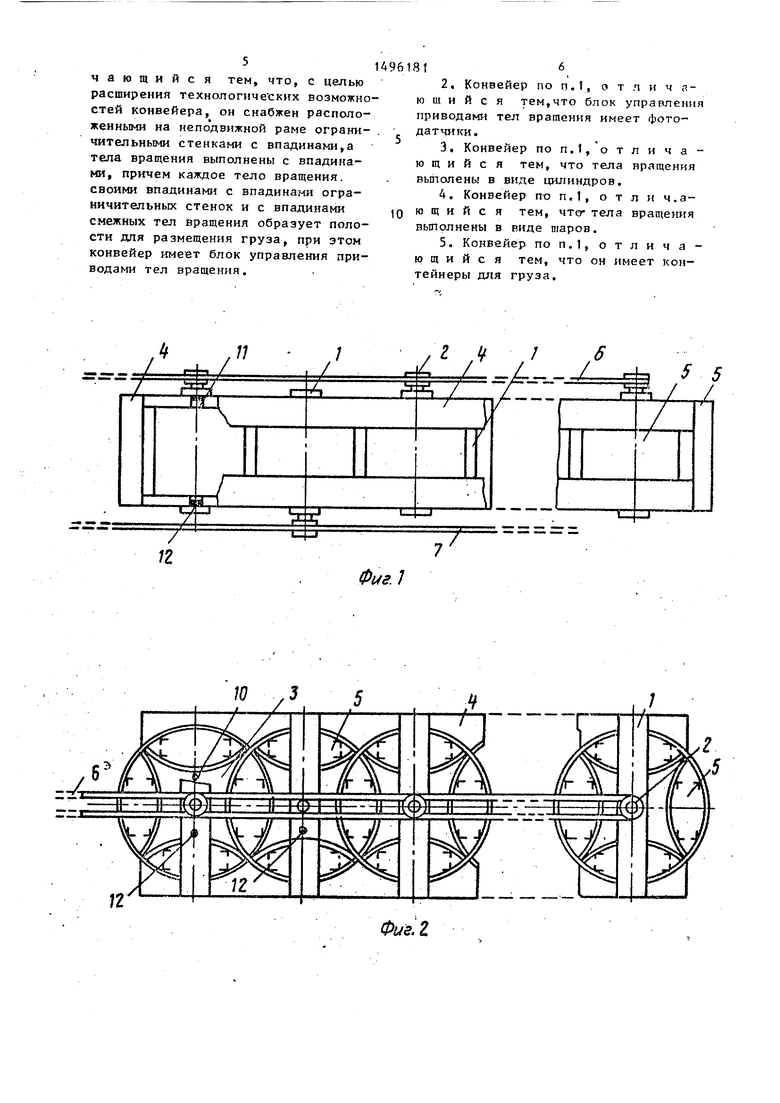
На фиг.1 и 2 изображена часть линии конвейера с цилиндрическим те- лом вращения, две проекции;на фнг.З и 4 - цилиндрическое тело вращения.
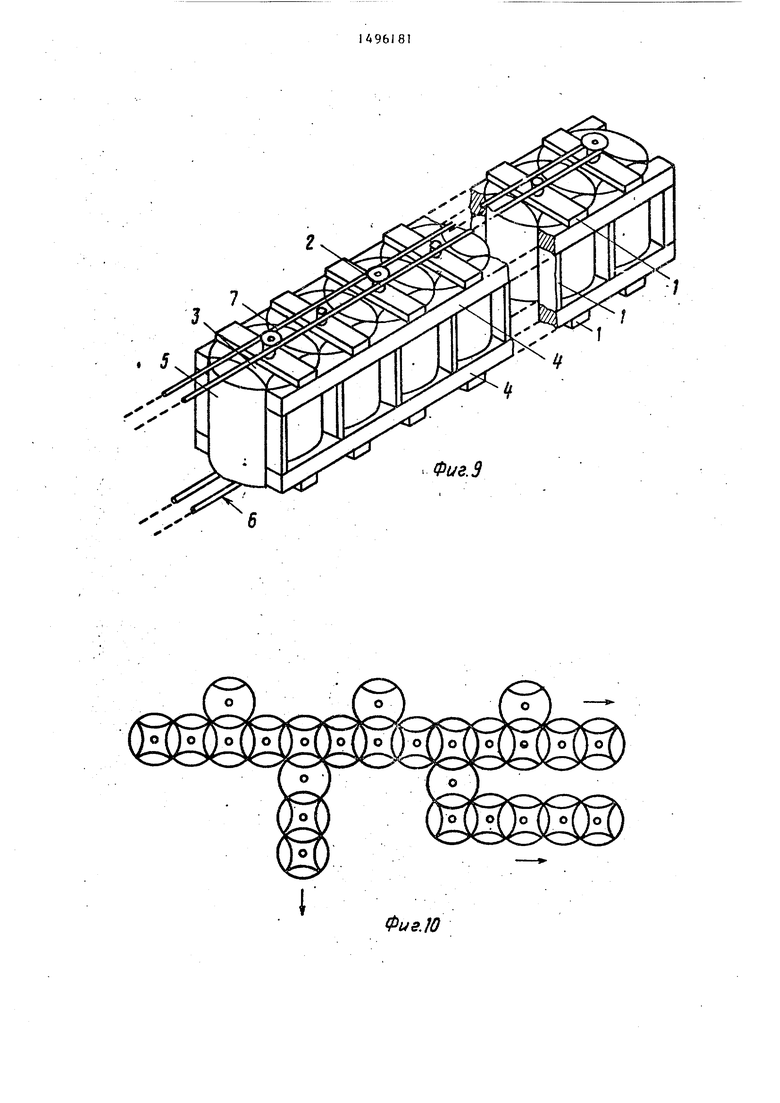
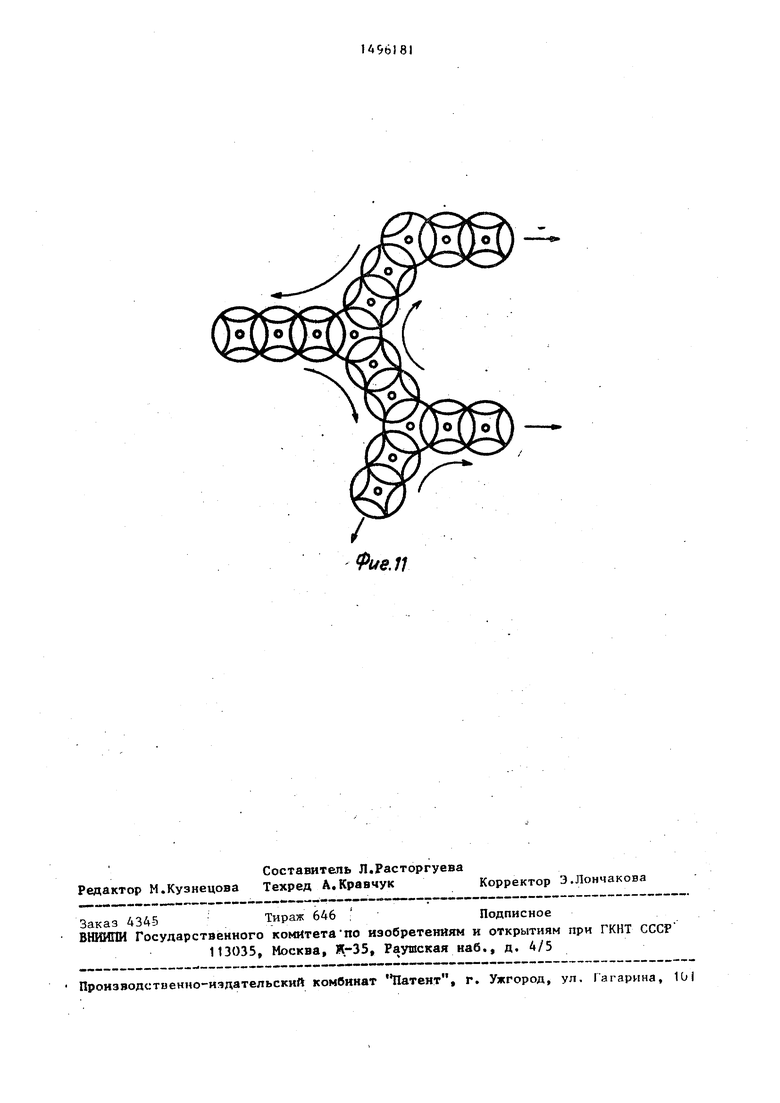
две проекции; на фиг.5 и 6 - контейнер (поддон), две проекции;на фиг.7- йинетическая схема привода линии конвейера с системой управ.ления приводом; на фиг.8 - часть линии конвейера с тепами вращения в виде шаров, общий вид в изометрии; на фиг.9 - часть линии конвейера с телами вращения в виде цилиндров, общий вид в изометрии; на фиг.10 и 11 - схемы движения грузопотоков по конвейеру. Конвейер содержит раму 1, на которой вертикально закреплены оси 2 тел вращения 3 с впадинами, ограни-
00
«Ji
314
чнтельные 4 с впадинами вдоль бокорых поверхностей тел вращения и контейнер (поддон) 5 для транспортировки груза по конвейеру. Каждое тело вращения своими впадинами с впадинами ограничительных стенок и с впадинами смежных тел вращения образует полости для размещения груза. Конвейер содержит два привода (см. фиг.7): привод четньгх 6 тел вращения и привод не етных 7 тел вращения, которые приводятся в движение с помешаю распределительного блока-8, управляемого блоком управления 9 приводом конвейера. Кроме того, хотя бы один четный и один нечетный ролики имеют по крайней мере два сквозных отверстия 10, параллельных оси 2 его вращения. Оба сквозных отверстия 10 (см фиГоЗ и 4) расположены централь симметрично относительно оси .2 вращения тела вращения 3. На верхней части раьш ( конвейера установлены светоизлучатели 11, а иа нижней.час- г И рамы 1 конвейера напротив свето- излучателей 11 - фотоприемники 12, вьгход которьк связан с блоком управ ления 9 приводом конвейера, ,
Форма тел вращения может быть про извольной, лишь бы она представляла собой фигуру вращения. Наиболее реальная форма тел вращения - цилиндр (см. фиг.3 и А) или шар (см.фиг.8),
Цилиндрическое тело вращение по- зволяет создать конвейер, перемеща - груз по сложной траекторииj но в одной плоскости, а шариковое тапо вращения - конвейер, перемешающий груз в трех измерениях. Это связано с reMj что шар бесконечное множество осей вращения. .
Контейнер (поддон) для транспортировки груз% по конвейеру может так
же вьшолняться различным образом в зависимости от типа транспортируемого груза (сыпучий или монолитный, жидкий или твердый).
Конзейер работает следующим образом.
После загрузки грузом самих крайним контейнеров линии конвейера (с обоих концов литчии можно загружать и .выт ружатъ груа, поскольку предлагае- Ь5ьш конвейер позволяет одновременно по одной линии пропускать два грузд- Потока в противоположных направлени ях,, что невозмо; но осуществить при нспользовании любого другого типа
Q 5 0 5
0
с Q
5
0
г
конвейера) на блоке управления приводом конвейера вырабатывается сиг- нал, включаю1щп1 привод, например, нечетных тел вращения. При этом (на первом шаге) четные вращения стоят на месте. При повороте нече.т- ного тела вращения, имеющего сквозные отверстия, на 180 отверстие со единит каналом светоизлучатель с фотоприемником. В результате в фото- приемго1ке моментально выработается сигггал, который поступит в блок управления приводом конвейера. В последнем выработается два сигала: Остановит привод нечетных тел вращения и Включить привод четных тел вращения. При этом (на втором шаге) все нечетные тела вращения стоят на месте, а четные поворачиваются на -180 относительно своей оси вращения, пока одно из сквозных отверстий.в одном из четных тел вращения не соединит свободным каналом светоизлучатель с фотоприемником, сигнал с которого поступит на блок управления приводом. В результате произойдет остановка привода четных тел вращения и В1шючится привод нечетных тел вращения.
Груз последосательно переместится от тела вращения к телу вращения, не сталхсиваясь с грузом, идущим в )тротивоположном направлении.
Число отверстий в ролике может быть и больше двух (например, четыре отверстия - две пары центрально симметричных, расположенных взаимно перпендикулярных отверстия). При этом, во-первых, все поддоны конвейера будут загружены и, во-вторых, появится возможность разветвления главной линии на побочные конвейерные линии. При этом в месте разветвления тело вращения также будет иметь сквозные отверстия, а на раме будут расположены дополнительные светоизлучатели и фотоприемники, выход которых также связан с блоком управления приводом конвейера, который запускает в ход побочные линии конвейера„
г
.ор.мула изобретения
1с Конвейер ,« содержащий неподвиж- Ную раму, на которой закре1гпены оси с установленными на них толами вращения для транспортирования груза и приводы тел вращения, о т л и чающийся тем, что, с целью расширения технологнче ских возможно стей конвейера, он снабжен расположенными на непо движной раме ограничительными стенками с впадинами,а тела вращения выполнены с впадинами, причем каждое тело вращения, своими впадинами с впадинами ограничительных стенок и с впадинами смежных тел вращения образует полости для размещения груза, при этом конвейер имеет блок управления при- тел вращения.
816
2.Конвейер по п.1, отличи- ю ш и и с я тем,что блок управления приводами тел вращения имеет фотодатчики.
3.Конвейер по п.1, о т л и ч а - го щ и и с я там, что тела вращения выполены в виде цилиндров.
4.Конвейер по п.1, о т л и ч.а- ю щ и и с я тем, что- тела вращения
вьшолнены в виде щаров.
5.Конвейер по п.1, отличающий с я тем, что он имеет контейнеры для груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2016 |
|
RU2628371C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2012 |
|
RU2506653C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2008 |
|
RU2381567C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2015 |
|
RU2590997C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2010 |
|
RU2434309C1 |
| Загрузочное устройство для конвейеров | 1978 |
|
SU781152A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2008 |
|
RU2366005C1 |
| ТЕРМИНАЛ ДЛЯ ПОТОЧНОЙ ОБРАБОТКИ КОНТЕЙНЕРОВ НА ОСНОВЕ СОРТИРОВОЧНОЙ ГОРКИ КУЗОВКОВА | 2008 |
|
RU2388680C2 |
| ПЛАСТИНЧАТЫЙ КОНВЕЙЕР | 2004 |
|
RU2270150C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИЗНЕДЕЯТЕЛЬНОСТИ РЫБЫ ПРИ ТРАНСПОРТИРОВКЕ НА БОЛЬШИЕ РАССТОЯНИЯ И УСТАНОВКА ДЛЯ ОБЕСПЕЧЕНИЯ ЖИЗНЕДЕЯТЕЛЬНОСТИ РЫБЫ ПРИ ТРАНСПОРТИРОВКЕ НА БОЛЬШИЕ РАССТОЯНИЯ (ВАРИАНТЫ) | 2010 |
|
RU2445771C1 |
Изобретение относится к машиностроению и может быть использовано при создании непрерывных автоматических линий транспортировки и обработки материалов. Цель изобретения - расширение технологических возможностей конвейера.. Конвейер содержит неподвижную раму 1, на которой закреплены оси 2 с установленными на них телами вращения с впа динами, приводы 6 и 7 четных и нечетных тел вращения, блок управления приводами 6 и 7, имеющий фотодатчики, расположенные на раме 1, ограничительные стенки 4 с впадинами и контейнеры 5 для транспортировки груза. Каждое тело вращения образует полости для размещения груза. Тела вращения могут быть выполнены в виде цилиндров или в виде шаров. При использовании предлагаемого конвейера одновременно по одной линии можно пропускать два грузопотока в противоположных направлениях. Блок управления позволяет втслючать приводы 6 и 7 четных и нечетных тел вращения поочередно. В результате груз последовательно перемещается от одного тела вращения к другому, не сталкиваясь с грузом, идущим в .противоположном направлении. 4 з.п. ф-лы, 11 ил.
f / 5
TFIH jIFff F
Фиг. 1
II И II К
Фиг.1
X
ш
Фие.З
Фиг.
/
ГН
- А
7
Фиг. 5
Фие.б
гК:
Р1сГ
0;/«tf
. 5
Фие,Ю
| Шаговый конвейер | 1978 |
|
SU749756A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Роликовый конвейер | 1976 |
|
SU624831A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
