i
СЛ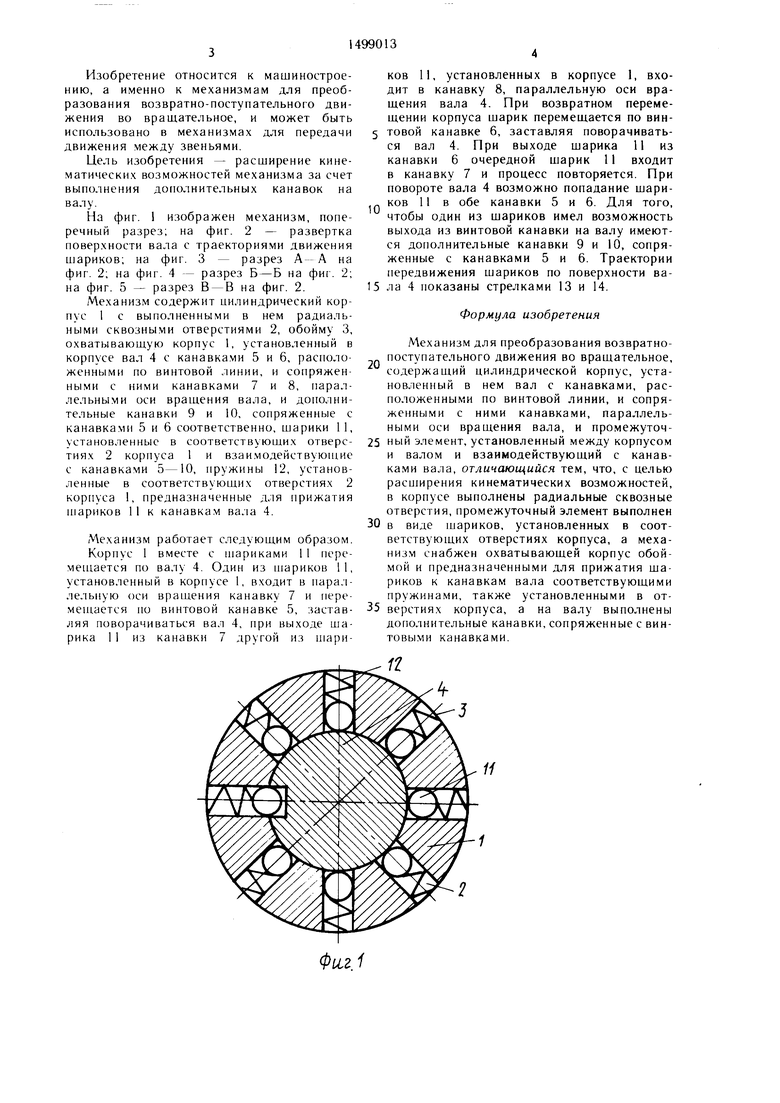
| название | год | авторы | номер документа |
|---|---|---|---|
| Ударный гайковерт | 1983 |
|
SU1133080A1 |
| ШАРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 2000 |
|
RU2184289C2 |
| ВИНТОШАРОВОЙ ЧЕТЫРЕХТАКТНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2347088C1 |
| Роторная машина | 1989 |
|
SU1779786A1 |
| Электромагнитный шаговый двигатель | 1974 |
|
SU504277A1 |
| СКВАЖИННЫЙ ЭЛЕКТРОПЛУНЖЕРНЫЙ НАСОС | 2014 |
|
RU2550858C1 |
| Устройство для юстировки катодов электронного эмиссионного микроскопа | 1981 |
|
SU970509A1 |
| Устройство для очистки канализационных трубопроводов | 1987 |
|
SU1538935A1 |
| Пресс | 1980 |
|
SU899370A1 |
| Сцепная шариковая муфта | 1973 |
|
SU526728A2 |
Изобретение относится к машиностроению и может быть использовано в механизмах для передачи движения между звеньями. Целью изобретения является расширение кинематических возможностей механизма. На валу выполнены винтовые канавки 5 и 6, сопряженные с последними и параллельные оси вращения вала канавки 7 и 8, а также дополнительные канавки 9 и 10. В цилиндрическом корпусе выполнены радиальные сквозные отверстия, в которых установлены шарики, взаимодействующие с канавками 5-10 вала. 5 ил.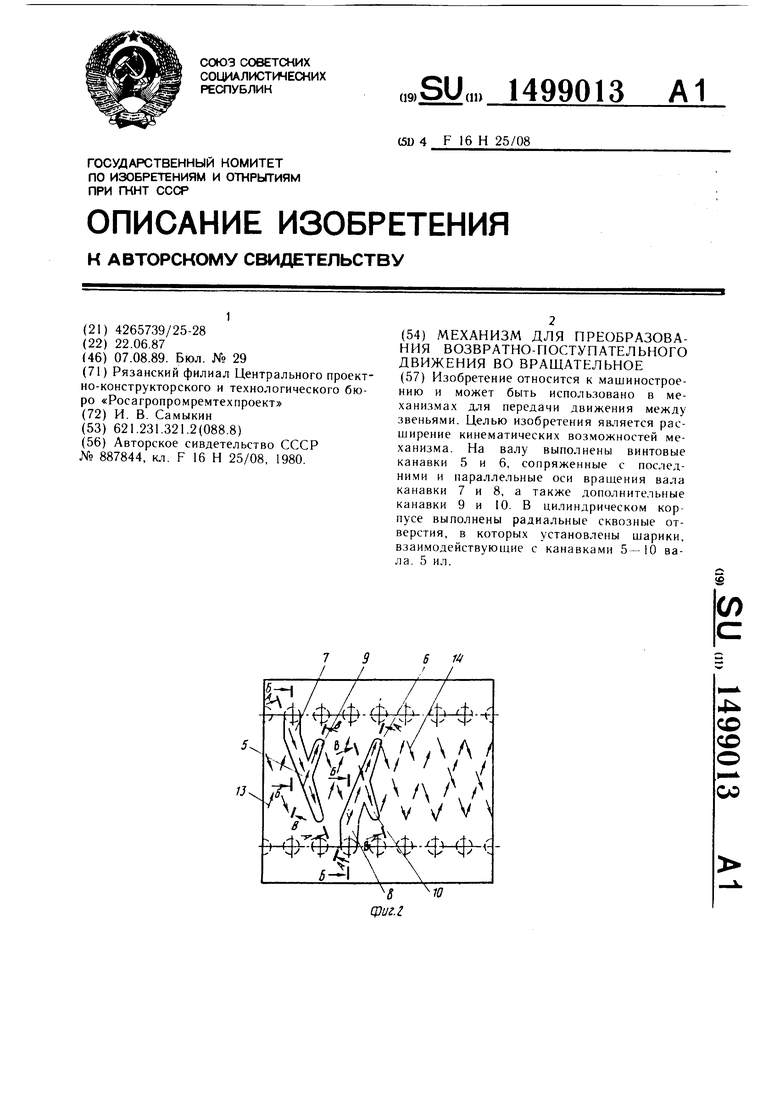
и -ф Д-4 Л/ А /
л
/V / V
/
Д-4/ А /
СО со
00
Изобретение относится к машиностроению, а именно к механизмам для преобразования возвратно-поступательного движения во вращательное, и может быть использовано в механизмах для передачи движения между звеньями.
Цель изобретения - расширение кинематических возможностей механизма за счет выполнения дополнительных канавок на валу.
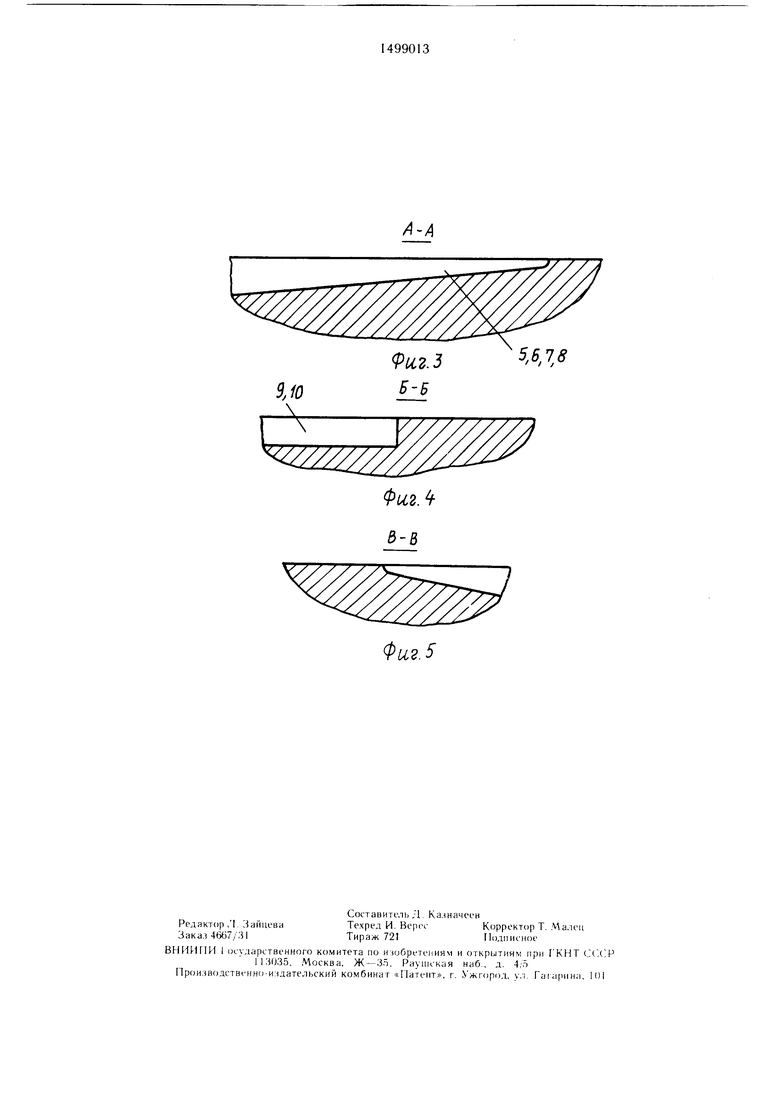
На фиг. 1 изображен механизм, поперечный разрез; на фиг. 2 - развертка поверхности вала с траекториями движения шариков; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - разрез В - В на фиг. 2.
Механизм содержит цилиндрический корпус 1 с выполненными в нем радиальными сквозными отверстиями 2, обойму 3, охватываюш.ую корпус 1, установленный в корпусе вал 4 с канавками 5 и 6, расположенными по винтовой линии, и сопряженными с ними канавками 7 и 8, параллельными оси вращения вала, и дополнительные канавки 9 и 10, сопряженные с канавками 5 и 6 соответственно, шарики 11, установленные в соответствующих отверстиях 2 корпуса 1 и взаимодействуюп1ие с канавками 5-10, пружины 12, установленные в соответствуюших отверстиях 2 корпуса 1, предназначенные для прижатия П1ариков 11 к канавкам Ba. ia 4.
Л1еханизм работает следующим образом.
Корпус 1 вместе с пшриками 1 1 перемещается по валу 4. Один из пшриков 11, установленный в корпусе 1, входит в параллельную оси вращения канавку 7 и пере- меп1.ается по винтовой канавке 5, заставляя поворачиваться вал 4, при выходе шарика 1 1 из канавки 7 другой из шариФаг.1
0
ков II, установленных в корпусе 1, входит в канавку 8, параллельную оси вращения вала 4. При возвратном перемещении корпуса щарик перемещается по винтовой канавке 6, заставляя поворачиваться вал 4. При выходе шарика 11 из канавки 6 очередной щарик 11 входит в канавку 7 и процесс повторяется. При повороте вала 4 возможно попадание шариков 11 в обе канавки 5 и 6. Для того, чтобы один из шариков имел возможность выхода из винтовой канавки на валу имеются дополнительные канавки 9 и 10, сопряженные с канавками 5 и 6. Траектории передвижения шариков по поверхности ва5 ла 4 показаны стрелками 13 и 14.
Формула изобретения
Механизм для преобразования возвратно- поступательного движения во вращательное, содержащий цилиндрической корпус, установленный в нем вал с канавками, расположенными по винтовой линии, и сопряженными с ними канавками, параллельными оси вращения вала, и промежуточ5 ный элемент, установленный между корпусом и валом и взаимодействующий с канавками вала, отличающийся тем, что, с целью расп ирения кинематических возможностей, в корпусе выполнены радиальные сквозные отверстия, промежуточный элемент выполнен
0 в виде шариков, установленных в соответствующих отверстиях корпуса, а механизм снабжен охватывающей корпус обоймой и предназначенными для прижатия ща- риков к канавкам вала соответствующими пружинами, также установленными в от5 верстиях корпуса, а на валу выполнены дополнительные канавки, сопряженные с винтовыми канавками.
4Фи2.5
| Механизм для преобразования возвратно-поступательного движения во вращательное | 1980 |
|
SU887844A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
