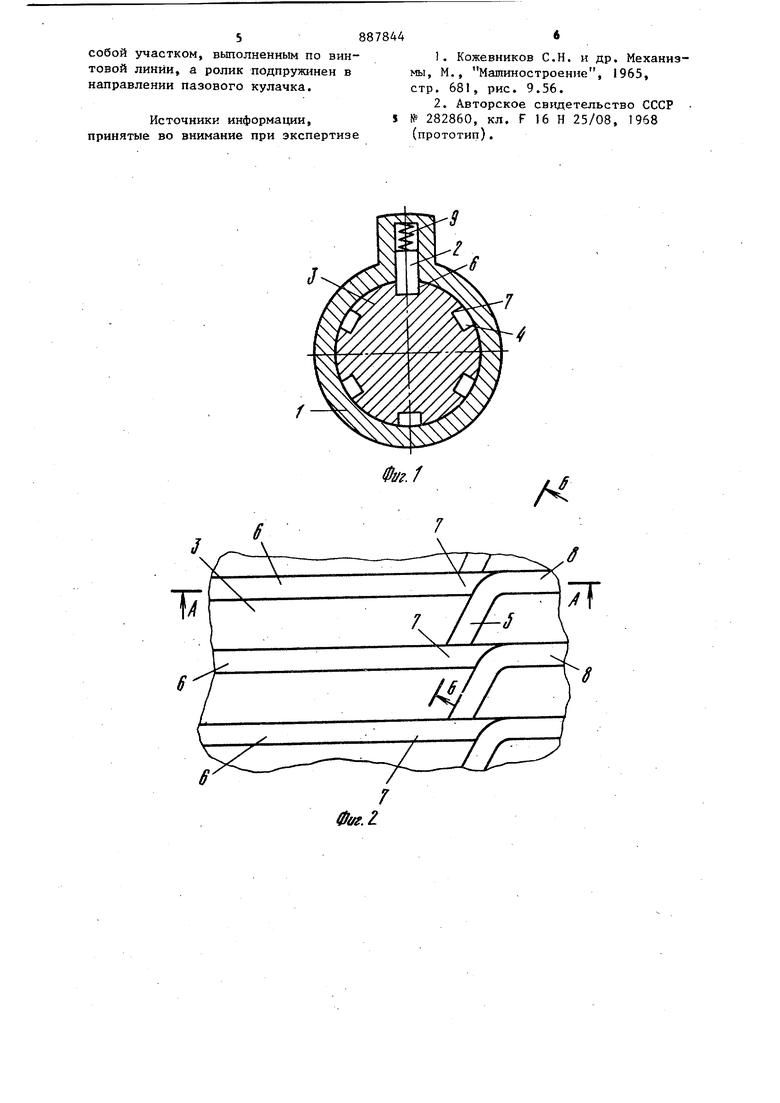
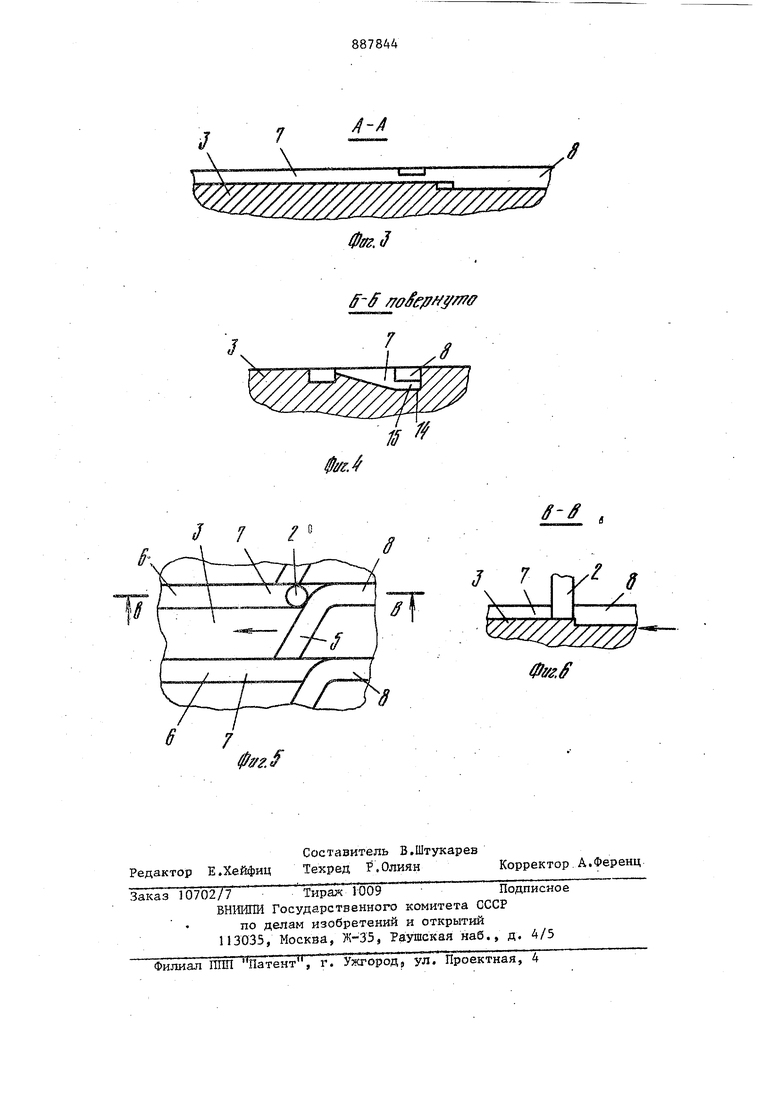
Изобретение относится к машиностроению, а именно к механизмам для преобразования возвратно-поступательного движения во вращательное, и может быть использовано в механизмах для передачи движения метвду звеньями. Известен механизм для преобразования возвратно-поступательного движения во вращательное, содержащийкорпус с установленным в нем роликом и валом с пазовым кулачком, взаимодействующим с роликом и имекядим участки, выполненные по винтовой линии В этом механизме на валу с пазовым кулачком имеется участок, выполненный в виде зубчатой рейки, взаимодействующей с зубчатым колесо Вал этого механизма при одном двойном ходе получает прямбе и обратное вращение на одинаковый угол, т.е. при прямом продольном ходе вала, сообщенном ему зубчатым колесом, аал вращается в одну сторону. например по часовой стрелке, а при обратном ходе вал вращается, соответственно, против часовой стрелки на тот же угол. Следовательно, вал может сделать ограниченное число оборотов в каждую сторону. -Число оборотов вала в одном направлении за- висит от числа витков пазового кулачка на его поверхности. недостатком этого механизма является то, что при соблюдении условия несамоторможения пары ролик-пазовый кулачок, величина шага пазового кулачка будет большой и сама длина вала также будет значительной, что в конечном итоге влияет на габариты и вес механизма. Ближайшим к изобретению по своей технической сущности является механизм для преобразования возвратнопоступательного движения во,вращательное, содержащий корпус ,с уста-; новленным в нем роликом и валом с пазовым кулачком, взаимодействующим с роликом и имеющим участки, выполненные по винтовой линии и сопряженные с участками параллельными оси вращения вала 2 . В этом механизме пазовый кулачок имеет дополнительные участки, вьшолненные по винтовой линии в направлении, противоположном направлению винтовой линии основных участков, два смежных участка, выполненные по винтовой линии, связаны с помощью одной винтовой канавки так, что осевые линии участков, параллельных оси вращения вала, смещены относительно точек пересечения осевых линий участков, выполненных по винтовой линии в направлении, противоположном вращению вала. Недостатком известного механизма являются его большие габариты, обусловленные взаимным расположением участков пазового кулачка. Цель изобретения - уменьшение габаритов механизма. Цель достигается тем, что в известном механизме для преобразования возвратно-поступательного движения во вращательное, глубина каждого параллельного оси вращения вала участка выполнена двуступенчатой по дли не и ступени разной глубины смежных участков сопряжены между собой участком, выполненным по винтовой линии, а ролик подпружинен в направлении пазового кулачка. На фиг. 1 изображено поперечное сечение механизма, проходящее через 2 - участок разОСЬ ролика; на фиг вертки поверхности вала; на фиг. 3 сечение А-А на фиг. 2; на фиг. 4 сечение Б-Б на фиг. 2j на фиг. 5 положение ролика при переходе его из одного участка .пазового кулачка в другой; на фиг. 6 - сечение В-В на фиг. 5. Механизм содержит корпус 1 с уста новленным в нем роликом 2 и валом 3 с пазовым кулачком 4, взаимодействующим с роликом 2 и имеющим участки 5 выполненные по винтовой линии и сопряженные с участками 6, параллельны ми оси вращения вала 3. Глубина каждого параллельного оси вращения вала участка 6 выполнена дв ступенчатой по длине, и ступени 7 и 8 разной глубины смежных участков сопряжены . собой участком 5, выполненным по винтовой линии, а рол 4 2подпружинен в направлении пазового. кулачка 4 с помощью пружины 9. Механизм работает следующим образом. В корпусе 1 с роликом 2 перемещается вал 3. Ролик 2 перемещается по пазовому кулачку 4 и переходит с одной ступени 7 на другую ступень 8 участка 6. Далее ролик 2 перемещается по ступени В. При изменении направления движения вала 3 ролик 2, подпружиненный в направлении пазоього кулачка 4, скользит по дну ступени 8 участка 6, параллельного оси вала 3, до стыка ступеней 7 и 8 и здесь переходит в участок 5, выполненный по винтовой линии. При перемещении ролика 2 по участку 5 происходит поворот вала 3, и,как только ролик 2 выходит из участка 5, соединяющего смежные участки 6, на ступень 7 следующего смежного участка 6, поворот вала 3 прекращается и вал 3совершает только поступательное перемещение. При изменении направления движения вала 3 цикл повторяется. При выполнении пазового кулачка не на валу, а в пло.скости, например в пластине, последняя при работе механизма будет совершать шаговое возвратно-поступательное двийсение. Механизм имеет меньшие габариты и вес по сравнению .с аналогичными конструкциями за счет выполнения глубины каждого параллельного оси вращения вала участка двуступенчатым и сопряжения ступеней разной глубины смежных.участков между собой участком, -выполненным по винтовой линии. Формула изобретения Механизм для преобразования воз- . вратно-поступательного движения во вращательное, содержащий корпус с . . установленным в нем роликом и валом с па-зовым кулачком, взаимодействующим с роликом и имеющим участки, выполненные по винтовой линии и сопряженные с участками, параллельными оси вращения вала, отличающийся тем, что, с целью уменьшения габаритов механизма, глубина каждого параллельного оси вращения вала участка выполнена двуступенчатой по длине и ступени разной глубины смежных участков сопряжены между
собой участком, вьшолненным по винтовой линии, а ролик подпружинен в направлении пазового кулачка.
Источники информации, принятые во внимание при экспертизе
1,Кожевников С.Н. и др. Механизмы, М., Машиностроение, 1965, стр. 681, рис. 9.56.
2.Авторское свидетельство СССР № 282860, кл. F 16 Н 25/08, 1968
(прототип).

X
и
д
7
Л
S
/
Л
5
фуг.З
ff ffj7ff fjy/ ff
/ 7 /
LA .
