Изобретение относится к тоннельному строительству и может быть использовано при сооружении тоннелей и станций метрополитена.
31510
Цель - улучшение условий труда и понышение производительности путем автоматизации соблюдения очередности работы захвата и грейфера. ,
Яа фиг,1 изображено устройство для проходки тоннелей; на фиг,2 - то же, вид со стороны забоя; на фиг,3 - то же, гидравлическая схема.
Устройство содержит несущую раму 1 с рабочими плогдадками 2 и сводовой аркой.3. На 1 в подшипниковых опорах 4 смонтирован приводной поворотный вал 5, на котором закреплена рукоять 6, На одном конце рукояти 6 установлен захват 7 для элементов обделки тоннеля со вторым гидроцилиндром 8, а на другом - грейферный грузчик (грейфер) 9 с первым гидроцилиндром 10,
В корпусе второго гидроцилиндра 8 захвата установлен поршень 11 со штоком 12, образующие поршневую 13 и штоковую 14 полости.
Первый гндродилиндр 10 грейферного грузчика может иметь, например, следующую конструкцию, В корпусе установлены поршень 15 со штоком 16, в теле которого выполнен продольный канал 17 и охватывающие шток 16 порг шень 18 со штоком 19, Элементы первого гидроцилиндра 10 образуют между собой и с его корпусом поршневую 20, промежуточную 21 и штоковую 22 полости.
Шток 16 посредством тяг 23 шарнир- но соединен с каждой из челюстей грейферного грузчика (грейфера) 9, Тяги 23 связаны между собой общим шарниром 24, К штоку 19 шарнирами 25 прикреплены тяги 26, также связанные с каждой из челюстей грейферного грузчика 9, Тяги 23 и 26 расположены на общей оси 27,
В систему управления гидроцилиндрами 8 и 10 входят распределительное устройство 28, линия 29 поршневой полости гидроцилиндра 10 грейферного грузчика, обводная магистраль 31, ли ния 32 поршневой полости другого гидроцилиндра 8 захвата, .пиния 33 юто- козой полости гидроцилиндра 8 захвата, линия управления 34 и блокировочное устройство, выполненное в виде двустороннего гидрозамка 35, Гидрозамок 35 соединяет между собой линии 32 поршневой полости и 33 штоковой полости гидроцилиндра 8 захвата и имеет промежуточную 36, подклапаннуто
JQ 5 0
5 о
5
5
0
5
поршневую 37, подклапанную штоковую 38 и две клапанные 39 и 40 полости, которые образованы поршнем 41, нем и штоком 42 и двумя клапанами 43 и 44. При зтом промежуточная полость 36 сообщена с линией 29 поршневой полости гидроцилиндра 10 грейферного грузчика 9, подклапанная поршневая полость 37.сообщена с линией 32 поршневой полости гидроциг линдра 8 захвата, подклапанная што-, кован полость 38 сообщена с линией / 33 штоковой полости гидроцилиндра 8 захвата, клапанная полость 39 сооб- 0(ена с поршневой полостью 13 гидроцилиндра 8 захвата, а клапанная полость 40 сообщена со штоковой полостью 14 гидроцилиндра 8 захвата, В гидравлические линии, сообщающие клапанные полости 39 и 40 гидрозамка 35 с указанными вьппе полостями гидроцилиндра 8 захвата, встроены дроссели с обратными клапанами 45 и 46, обеспечивающие плавное перемещение поршня 11 со штоком 12.
Линия 32 поршневой полости гидро- цилиндра 8 захвата соединена с нией 30 штоковой поЛости гидроцилиндра 10 грейферного грузчика при помощи обратного клапана 47, В линию 30 штоковой полости гидроцилиндра 10 встроен клапан последовательности 48 и дроссель с обратным клапаном 49,
Система имеет разгрузочнб-предог- хранительный клапан 50, управляемый электромагнитом 51, и обратный клапан 52,
.Рабочая жидкость подается от насоса 53,
На штоке 16 нижнего звена телеско пической рукояти вьшолнен внешний упор 54 для взаимодействия со штоком 19 среднего звена телескопической рукояти. Гидрошарнир обозначен позицией 55,
Шток 16 поср едством тяг (или проушин) 56 также шарнирно соединен с каждой челюстью грейферного грузчика 9,
Агрегат работает следунидим зон,
В исходном состоянии при обесть- ченном электромагните 5t рабочая жидкость через клапан 50 поступает на слив. Агрегат не работает. Грейферный грузчик 9 находится в зоне погрузки. Для осуществления операций загрузки и подъема грейферного грузчика включают электромагнит 51 клапана 50, Пр этом распределительное устройство 28 находится в положении О, Рабочая жидкость через обратный клапан 52, минуя распределительное устройство 28, по обводной магистрали 31 и каналу 17 штока 16 поступает в промежуточную полость 21 гидроцияиндра 10 грейферного грузчика. Его поршневая полость 20 через распределительное устройство 28 сообщена со сливом, а штоковая полость 22 заперта клапаном последовательности 48 и обратным клапаном 45, Происходит втягивание што- ка 16 и, следовательно, через тяги 23, 26 и 56 и шарниры 24, 25 и 27, осуществляется смыкание челюстей грейферного грузчика 9 и заполнение его грунтом. Одновременно рабочая жидкость из обводной магистрали 31 по линии 33 штоковой полости гидро-. цилиндра 8 захвата поступает в под- клапанную штоковую 38 полость гидрозамка 35 и открывает клапан 44, Давг- ление полости 38, воздействуя на што 42, открывает клапан 43, Промежуточная полость 36 гидрозамка 35 сообщается при этом со сливом, В результат этого поршневая полость 13 падроци- линдра 8 захвата сообщается со сливо через распределительное устройство 28, а рабочая жидкость поступает в его штоковую полость 14, Происходит втягивание штока 12 и соединенного с ним захвата .7 для элементов обделк Тоннеля, Когда поршень 15 штока 16 втягивается в корпус гидроцилиндра 10 грейферного грузчика 9 до взаимодействия упора 54 со штоком 19 среднего звена телескопической рукояти, н челюсти грейферного грузчика 9 смыкаются, давление рабочей жидкости в магистрали 31 повьштается и когда оно достигает величины, на которую настроен клапан последовательности 48, последний открьтается и сообщает магистраль 31 через обратный клапан дросселя 49 со штоковой полостью 22 гидроцилиндра 10 грейферного грузчика. Поступающая в штоковую полость 22 рабочая жидкость вызывает втягивание поршня 18 со штоком 19, Рабочая жидкость, находящаяся в промежуточ- ной полости 21, не препятствует подь ему поршня 18, так как она совместно с поршнем 15 действует как одно рабо чбв тело. Поэтому втягивание поршня 18 со штоком 19 происходит одновре
д 5 0 5 5
0
0
5
0
менно с дальнейшим втягиванием поршня 15, При этом челюсти грейферного грузчика 9 надежно удерживаются в сомкнутом положении из-за наличия давления в промежуточной полости 21, а перемещение штока 19 через тяги 26 и шарниры 25 и 27 обеспечивает подъем всего сомкнутого грейферного грузчика 9,
По окончании подъема грейферного грузчика электромагнит 51 разгруэоч- но-предохранительного клапана 50 обесточивают, запирая тем самьтм полости гидроцилиндра 10 грейферного грузчика.
Для осуществления разгрузки грейферного грузчика 9 поворотом вала 5 отводят рукоять 6 в зону разгрузки и переключают распрелелительное устройство 28 в положение I, при одновременном включении электромагнита 51 разгрузочно-предохранительного клапана 50,
Рабочая жидкость под давлением поступает в поршневую полость 20 гидроцилиндра 10 грейферного грузчика 9, и шток 16 поршня 15 начинает вьщвигаться из корпуса гидроцилиндра 10. Жидкость из промежуточной полости 21 вытесняется по каналу 17 в обводную магистраль 31 и добавляется в напорную магистраль от насоса 53 и, следовательно, через распределительное устройство 28 в поршневую полость 20, Таким образом, поршень 15 со штоком 16 движутся ускоренно (или по дифференциальной схеме), вызывая поворот тяг 23, 26 и 56 на шарнирах 24, 25 и 27 и раскрытие челюстей грейферного грузчика 9, Происходит его разгрузка.
После раскрытия челюстей грейферного грузчика 9 (поршень 15 при этом упирается в поршень 18) давление в штоковой полости 22 гидроцилиндра 10 возрастает, и когда оно достигает величины, на которую настроен клапан последовательности 48, последний открывается и сообщает штоковую полость 22 с магистралью 31. Рабочая жидкость из этой полости поступает в обводную магистраль 31 через дроссель 49 и добавляется через распределительное устройство 28 и рабочему потоку, поступающему в поршневую полость 20.
В результате давление рабочей жидкости через поршень 15 передается и поршню, 18 со штоком 19, которые
7,5
вместе с поршнем 15 и гатоком 16 также выдвигаются по дифференциальной схеме, т.вс ускоренно. При этом выдвижение штока 19 через тяги 26 вызывает опускание грейферного грузчика 9 с раскрытыми челюстями.
В этом же положении распределительного устройства 28 рабочая жидкость под давлением поступает в промежуточную 36 и подклапанную штоковую 38 полости гидрозамка 35, В результате оба его клапана 3 и 44 открыты, и,.следовательно, поршневая полость 13 гидроцилиндра 8 захвата сообщается через распределительное устройство 28 со сливом, а штоковая полость 14 - с нйпором. Таким образом, захват 7 удерживается во втянутом состоянии.
Следовательно, в течение всего процесса загрузки и раз1 рузки грейферного грузчика 9 автоматически захват 7 заблокирован,
После разгрузки грейферного грузчика 9 отключают электромагнит 51, запирая тем самым полости гидроцилиндров.
Затем захват 7 с помощью поворотного вала 5 и рукояти 6 устанавливают в зону укладки очередно го злемента тоннельной обделки, закрепляют укладываемый элемент на захвате 7 и переводят распределительное устройство 28 в положение II при одновременном включении электромагнита 51 разгру- зочно-предохранительного клапана 50,
Рабочая жидкость от насоса 53 через обратный клапан 52 по обводной магистрали 31 и каналу 17 штока 16 поступает в промежуточную полость 21 гидроцилиндра 10 грейферного грузчика, одновременно через, распределительное устройство 28 и обратный клапан 47 рабочая жидкость поступает в штоковую 22 полость гидроцилиндра 10. Поршневая 20 полобть этого гидроци- линдра в это время сообщена через распределительное устройство 28 со сливом. Происходит втягивание в корпус гидроцилиндра 10 поршней 15 и 18. со штоками, что вызывает закрытие челюстей грейферного грузчика 9 и подъем последнего.
При этом рабочая жидкость от распределительного устройства поступает непосредственно в подклапанную поршневую 37 полость гидрозамка 35, открывает клапан 43 и попадает в поршневую полость 13 гидроцилиндра 8 зах
8
вата, Штоковая 14 полость последнего сообщена с обводной магистралью 31 через открытый клапан 44 гидрозамка
35, Начинается вьщвижение из гидроцилиндра 8 поршня 11 со штоком 12, несущим захват 7 с элементом обделки. Жидкость из штоко вой полости 14 ухо-. дит в обводную магистраль 31 и добавляется к потоку, поступающему в поршневую полость 13 гидроцилиндра 8, Поэтому происходит ускоренное (или дифференциальное) выдвижение захвата к месту укладки элементов обделки,
Таким образом, в течение процесса установки элемента обделки грейфер- ньй грузчик удерживается в нерабочем положении,.
Далее обесточивают электромагнит
51 разгрузочно-предохранитеЛьного клапана 50, и цикл работы повторяют.
Заявляемое техническое решение позволяет автоматически вьщерживать очередность работы захвата и грейферного грузчика, при этой темп выполнения операций загрузки-выгрузки грейфера и укладки элементов обделки также автоматически выдерживается постоянным зависит от субъективного состояния обслуживающего персонала.
Формула изобретения
Устройство для проходки тоннелей, включающее несущую раму, смонтированный на ней поворотньй вал, на котором закреплена рукоять с захватом для крепления с одной стороны грейфера с первым гидроцилиндром, другой гидроцилиндр, распределительное устройство, входы которого сообщены с напорной и сливной магистралями насоса, один выход - с одной полостью
первого гидроцилиндра и одной полог стью другого гидроцилиндра, которая через клапан последовательности и дроссель с обратным клапаном соединена с одной полостью первого гидроцилиндра, другой выход распределительного устройства соединен с другой полостью,первого гидроцилиндра, отличающееся тем, что, с целью улучшения условий труда и повышения производительности путем авто
матиэации соблюдения очередности работы захвата и т рейфера, его рукоять с другой сторойы снабжена захватом для крепления элементов обделки с
Д
х 7А ////////////////////////
е
/
Ф1/9, Z
79
:j4
/
%
r
ад
/л NFJ
3
J
33
5
,
35
Г
1
55
J/
zr
11
21
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическое распределительное устройство секции механизированной крепи | 1982 |
|
SU1129374A1 |
| Гидромолот | 1978 |
|
SU767283A1 |
| Гидропривод рабочего органа рыхлителя | 1986 |
|
SU1370199A2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1992 |
|
RU2037677C1 |
| ГРЕЙФЕР СФЕРИЧЕСКИЙ | 2011 |
|
RU2469947C1 |
| Устройство управления базой выемочной машины | 1986 |
|
SU1442651A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2012 |
|
RU2489609C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2464452C1 |
| Грейфер для разработки скважин | 1988 |
|
SU1567727A1 |
| Устройство для передвижки шахтной крепи | 1987 |
|
SU1479668A1 |

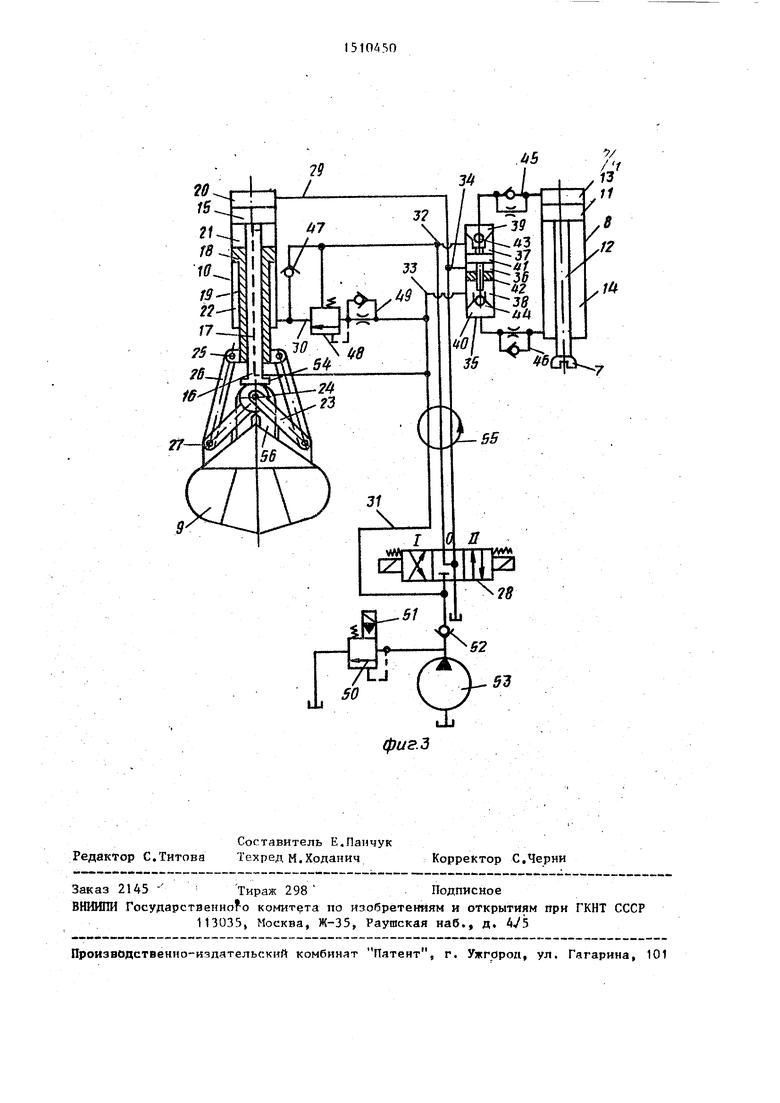
Изобретение относится к тоннельному строительству и может быть использовано при сооружении тоннелей и станций метрополитена. Цель - улучшение условий труда и повьшениё про- изводитедьности путем автоматизации соблюдения очередности работы захвата и грейфера. На одном конце рукоятки устройства установлен грейферный грузчик 9 с гидроцилиндром (ГЦ) 10. На другом ее конце установлен захват для элементов обделки тоннеля с ГЦ 8. Входы распределительного устройства (РУ) 28 сообщены с напорной и сливной магистралями насоса 53. Один вход РУ 28 сообщен с полостью 16 ГЦ 10 и полостью 13 ГЦ 8. Полость 14 ГЦ 8 через клапан (К) 48 последовательности и дроссель с обратным К 49 соединена со штоковой полостью 22 ГЦ 10, Выход РУ 28 соединен с поршневой полостью 20 ГЦ 10, Другой ГЦ 8 имеет двусторонний гидрозамок 35 с промежуточной 36, подклапанной поршневой 37, под- клапанной штоковой 38 и двумя клапанными 39, 40 полостями. Каждая из полостей 39, 40 сообщены соответственно со штоковой 14 и поршневой 13 полостями ГЦ 8 посредством дросселей с обратными К 45 и 46. Полость 13 по средством обратного К 47 сообщена со штоковой полостью 22 ГЦ 10, Полость 36 гидроэамка 35 сообщена с выходом РУ 28. Полости 22 и 14 ГЦ 8 и 10 посредством оСводной магистрали 31 сообщены с напорной магистралью насоса 53, имеющую обратвьй 52 и пре- дохракительньй 50 К. При включении насоса 53 жидкость через К 52 по ма- гистрали 31 поступает в полости 21 .и 14 ГЦ 10 и 8. Штоки 16 и 12 втяги- - ваются. При повышении давления до величины настройки К 48 последний откроется. Поршень 18 втягивается со штоком 19, Челюсти грузчика 9 зафиксируются давлением в полости 21. Перемещаясь, шток 19 через тяги 26 и шарниры 25 и 27 поднимает сомкнутый грузчик 9, При выключении насоса 53 автоматически запираются полости ГЦ 10, 3 ип. (Л СП Й1 ел
/L-J
50
&5/
Yx
62
rv
53
фиг.З
| Устройство для сооружения тоннелей | 1980 |
|
SU934023A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Детина А.Ф., Куранов В,Г | |||
| Гидропривод Мишин для животноводства и кормопроизводства, М., Колос, с.164- 169, рис | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
