3151
Изобретение относится к измерительной технике и может быть использовано для измерений углов поворота объектов.
Цель изобретения - расширение диапазона измерений, повышение точности измерений и расширение функциональных возможностей путем определения наряду с величиной перемещения и направления поворота объекта и его рулевого положения.
На фиг.1 представлена функциональная схема устройства; на фиг,2 - диаграммы измерения угла поворота объекта, закон изменения углов поворота объекта (, 27 напряжения на шинах),
Устройство содержит лазер 1, выход которого через линзы 2, зеркало 3 оптически соединен с зеркалом Ц, установленным на объекте, зеркало 3 механически соединено с двигателем 5; фотоприемники 6-8; 2п + 1 свето- диодов Э, где п - число разрядов младшей ступени преобразования, свето диоды 9 разбиты на две группы по п светодиодов в каждой группе, зеркало 4 оптически соединено с торцами всех светоёодов 9, 2п световодов 9 соединены с входом фотоприемника 8, (2п + + 1)-и световод соединен с входом фотоприемника 6, 1-й световод второй группы световодов расщеплен на два световода и соединен с входами фотоприемников 7 и 8; триггер 10, первый вход которого через компаратор 11 сое динен с выходом фотоприемника 7, выходы фотоприемников 6 и 8 соединены с входами компараторов 12 и 13, выход компаратора 13 через ключ 1A, счетчик-регистр 15, импульсов, вычислитель 16 соединен с индикатором 17, выход компаратора 13 соединен с первым входом реверсивного счетчика 18 импульсов, второй вход которого соединен с входом элемента НЕ 19, выход которого соединен с вторым входом ключа И, входы реверсивного счетчика 18 через биполярный цифро- аналоговый преобразователь 20, ключ 21 соединены с входом двигателя 5, первый вход триггера 22 соединен с выходом компаратора 12, вторым входом триггера 10, а выход триггера 22 соединен с вторым входом ключа 21 и вхот дом элемента 19 НЕ, выход триггера 10 соединен с вторым входом индикатора 17, третий вход реверсивного
64
счетчика 18 соединен с выходом компаратора 12; счетчик-регистр 15 содержит счетчик 23 импульсов и регистр
2, второй вход счетчика 23 соединен . с шиной 25 Сброс, выходы счетчика 23 через регистр 2k соединены с выходами счетчика-регистра 15, первый вход регистра 2k соединен с шиной 26 Передача кода, второй вход регистра 2k соединен с выходом компаратора 12, второй вход триггера 22 соединен с шиной 27 Установка нуля, второй вход вычислителя 16 соединен с выходом
компаратора 12, а третий вход - с шиной 25.
Устройство работает следующим образом.
Луч лазера 1 фокусируется с помощью
линз 2 на один из торцов световодов
9.В начальном состоянии зеркало k, установленное на объекте, находится в нулевом положении. С помощью юстировки зеркала 3 вручную с помощью механических приспособлений (не покат заны) луч направляется на нулевой
световод 9, соединенный с фотоприемником 6, который определяет нулевое состояние устройства. Сигнал с фотоприемника 6 поступает на компаратор 12, который формирует пороговый уровень, с помощью которого обнуляются триггеры
10,22, реверсиынй счетчик 18, регистр 2k, вычислитель 1б, а на индикаторе
17 появляется цифра нуль, соответствующая нулевому положению устройства Ключ 21 закрыт и напряже- ние на двигатель 5 не подается. При этом подается также импульс по шине
25 Сброс на счетчик 23, который устанавливает в нулевое полон{ение. Зеркало k может отклоняться на угол ±oipgOT нулевого положения. Это отклонение происходит дискретно с шагом й.в6оБ (Фиг.2), причем этот шаг « может несколько меняться от одного отклонения к другому, что обусловлено свойствами объекта. Устройство измеряет общий угол поворота Ао о5объекта. Световоды 9 разбиты на две группы по п°световодов в каждой. Одна группа световодов измеряет углы отклонения -4-oi-og, а другая -tios- обозначить йХ шаг между световодами
9, то ширина одной группы световодов будет равна:
.1 п ЛХ , (1) тогда из фиг.1 можно получить
1 R tgcf, (2)
где R - расстояние от зеркала до
линейки световодов 9; Cf - угловая апертура линейки
световодов У.
Поскольку угол отклонения луча зеркалом равен. , где ОБ угол поворота объекта, то X R tg2bolo6Выбираем 1 X таким образом, чтобы
i .tg2ici,, (3)
где ЛоС(|5 ,, максимально возможный
угловой поворот объекта за один шаг.
Это необходимо, чтобы при отклонении объекта на УГОЛ .моксЛУЧ находился на световодах У. При первом отклонении от нулевого положения на угол oiflgлуч света находится на линейке световодов 9. Система замеряет ; угол. Затем с помощью зеркала 3 луч устанавливается в нулевое положение на линейке 9. При следуюи(ем отклонении объекта на угол Aoi-og луч опять перемещается по линейке световодов 9. Система замеряет суммарный угол за два шага. И опять с помощью зеркала 3 луч возвращен в нулевое положение на линейке световодов 9. Описанный процесс повторяется, пока не будет измерен весь угол поворота объекта.
Рассмотрим теперь подробнее работу устройства. При перемещении луча по линейке световодов 9 на выходе фотоприемника 8 формируется периодический сигнал, который компаратором 13 превращается в периодическую пос- .ледовательность импульсов. Ключ 14 при этом открыт, так как на его вход от элемента НЕ 13 подан разрешающий сигнал, поскольку триггер 22 находится в обнуленном состоянии. Счетчик 23 и реверсивный счетчик 18 подсчитывает количество импульсов, соответствующее углу поворота A-oioe Однако, когда с выхода счетчика 23 будет передан и считан с регистра 2 только тогда, когда будет подан импульс на шину 26 Передача кода. Этот импульс подается на шину 26 после того, как объект повернется на угол .2, напряжение. и2б).При подаче сигнала по шине 26 код из счетчика 23 заносится в регистр 24 и передается в вычислитель 1б. Количество импульсов, подсчитанных счетчиком 23 при повороте, объе.кт а на уголЛсбоБ равно:
ш 1 tg2uoi.,.
(М
Из выражения (4) видно, что зави- симость числа импульсов от угла поворота нелинейная. Чтобы эту нелинейность устранить, введен вычислитель 1б, который производит вычисление yi- ла по формуле . . 1 шйХ , V
. 1 шйХ &оС - arctg--- .
Вычислитель начинает работать при подаче сигнала по шине 2б. После вычислителя 1б код, соответствующий углу
поворота объекта, поступает на индикатор 17, У которого на световом табло высвечивается результат преобразования.
Для того, чтобы измерить следующее отклонение объекта на угол oi , система должна быть возвращена в нулевое положение. Для этого на триггер 22 по шине Установка в нуль подается импульс (фиг.2, ). Триггер
22 срабатывает и через элемент НЕ 19 выключает ключ 14 и включает ключ 21. При этом доступ импульсов на счетчик 23 прекращается, а сигналом с триггера 22 реверсивный счетчик 18
переводится в режим вычитания. Через биполярный ПАП 20 и открытый ключ 21 напряжение поступает на двигатель 5, который поворачивает зеркало 3 так, что луч двигается по линейке световодов к нулевому положению. При этом импульсы от компаратора 13 поступают на реверсивный счетчик 18, который работает в режиме вычитания, В результате напряжение на выходе биполярного ЦАП 20 уменьшается и при дос- тижении лучом нулевого положения на линейке световодов 9 напряжение становится равным нулю и двигатель останавливается. При этом срабатывает
компаратор 12 и сбрасывает в нуль триггер 22, реверсивный счетчик 18, регистр 24 и вычислител ь 16, а на индикаторе 17 будет зафиксировано нулевое положение объекта. При этом ключ
21 размыкается и отключает двигатель 5 от системы, а ключ 14 через элемент НЕ 19 включается. Если объект 4 поворачивается в другую сторону от нулевого положения, то при прохождении
лучом первого световода от нулевого положения появляется импульсный си1 нал на выходе фотоприемника 7 и через компаратор 11 срабатывает триггер 10. знака, зажигает на индикаторе 17 лампочку. Это свидетельствует об отклонении объекта в другом направлении.
Аналогично происходит подсчет им- пульсов счетчиком 23. При возвращени системы в нуль зеркало 3 нужно поворачивать в другую сторону. Для этого на триггер 22 подается импульс Установка в нуль, который включает ключ 21. Поскольку при этом триггер; 10 находится в сработанном состоянии то он переключает биполярный ЦАП 20 так, чтобы напряжение на его выходе изменилось на противоположное, что приводит к. врасцению двигателя в противоположную сторону и возвращению системы к нулю аналогичным образом. При дальнейшем отклонении объекта импульсы от компаратора 13 через от- крытый ключ }k поступают на счетчик 23, где они складываются с ранее записанным кодом так, что при отклонении объекта на угол об на индикаторе 17 фиксируется данный угол. Рос ле окончания процесса измерения всег угла на счетчике 23 подается сигнал Сброс (фиг.2, Uis).
I
Предлагаемое устройство по срав- нению с прототипом обеспечивает расшрение диапазона измерения углов .в рзультате введения системы, возвращающего луч пос ле каждого отклонения объекта в нулевое положение, при это линейка световодов Э имеет ограниченное количество световодов по сравнению с линейкой, которую нужно было бы изготовить на весь диапазон измерения угла. Кроме того, повышается точность измерения. В настоящее время точность расположения волоконных световодов достигает порядка 100 на 1 мм, т.е. шаг л X 10 мкм. Если расположить линейку на расстоянии R 0,5 м, то разрешение по углу равно
1 iX
Aoiмпн
21 .
при этом по сравнению с прототипом повышает точность измерения и за счет введения вычислителя 16, что позволяет устранить нелинейность преобразования. Функциональные возможности расширяются за счет того, что .устройство позволяет определить направление поворота объекта и его нулевое положение.
с 5 0 5
о Q
5
0
5
Формула изобретения
Устройство для измерения угловых перемещений объекта, содержащее источник когерентного монохроматического излучения, последовательно расположенные по ходу излучения объектив, первое зеркало, второе зеркало, связываемое с объектом, и первый фотоприемник, блок обработки сигнала, отличающееся тем, что, с целью повышения точности, расширения диапазона измерений и функциональных возможностей путем определения наряду с величиной перемещения направления поворота объекта и его нулевого расположения, оно снабжено приводом, связанным с первым зеркалом, вторым и третьим фотоприемниками, оптически связанными с вторым зеркалом, 2п + 1 световодами, расположенными в ряд двумя симметричными относительно (2п + 1)-го световода группами по п световодов в каждой группе, (2п + 1)-й световод связан с входом первого фотоприемника, с входом второго фотоприемника связаны каждый из 2п световодов двух групп, с входом третьего фотоприемника связан ближайший к (2 + 1)-му световоду световод одной из групп, блок обработки сигнала выполнен в виде первого и второго триггров, первого, второго и третьего компараторов, последовательно соединенных первого ключа, счетчика с регистром, блока вычислений, индикатора, цифроаналогового преобразователя и второго ключа, логического элемента НЕ и реверсивного счетчика, входы первого, второго и третьего компараторов соединены соответственно с выходами первого, второго и третьего фотоприемников, первый вход первого триггера соединен с выходом третьего компаратора, второй вход - с выходом первого компаратора и с первым входом второго триггера, а выход - с входом цифроаналогового преобра зова теля, выход первого компаратора соединен с входом реверсивного счетчика, с вторыми входами счетчика и блока вычислений, выход второго компаратора соединен с входом первого ключа и с первым входом реверсивного счетчика, с вторым входом которого соединен вход логического элемента НЕ, выход второго триггера и второй вход второго ключа, выход которого связан с входом привода, выход логического
элемента И соединен с вторым входом первого ключа, вход сброса счетчика соединен с шиной Сброс, вход регистра счетчика и третий вход блока
вычислений соединены с шиной Передача кода, а установочный вход второго триггера соединен с шиной Ус- тановка нуля.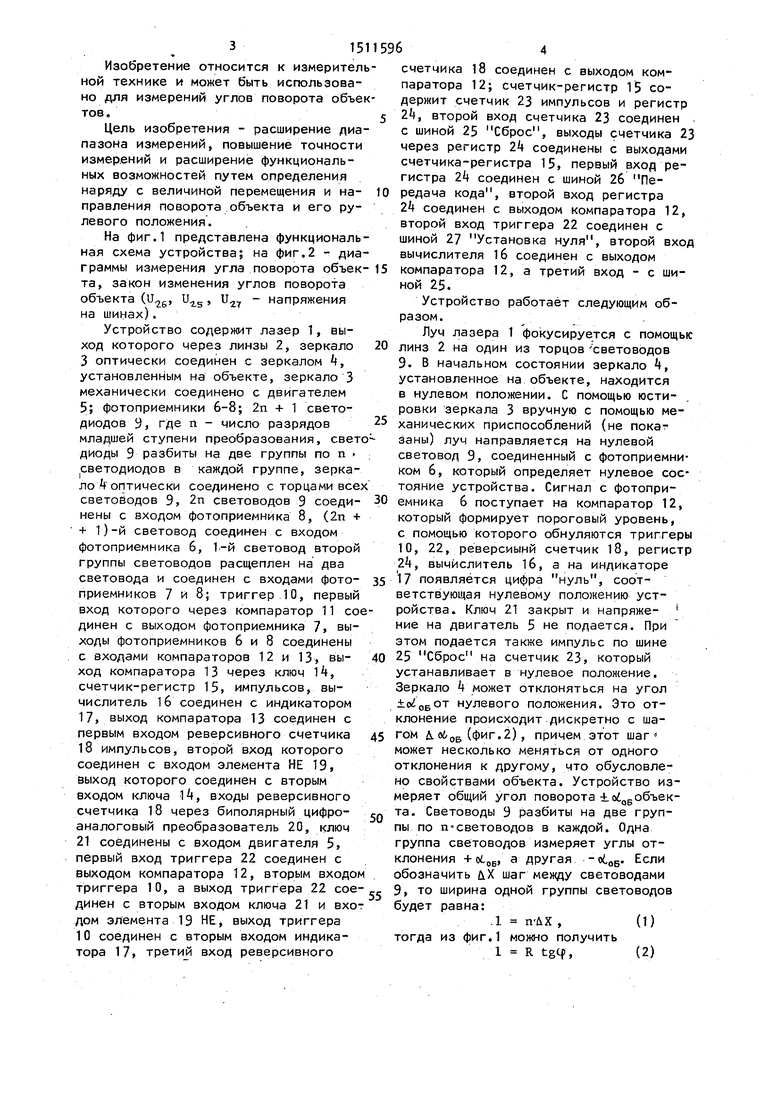

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| Устройство для измерения параметров вибрации | 1990 |
|
SU1783318A1 |
| МОЩНЫЙ ИМПУЛЬСНО-ПЕРИОДИЧЕСКИЙ ЛАЗЕР С НЕУСТОЙЧИВЫМ РЕЗОНАТОРОМ | 1985 |
|
SU1839868A1 |
| Голографическое постоянное запоминающее устройство | 1990 |
|
SU1725258A1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1215176A1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ОБЪЕКТИВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078360C1 |
| Устройство для измерения неравномерности скорости вращения | 1983 |
|
SU1112280A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2015 |
|
RU2611895C1 |
| Устройство для цифровой записи и воспроизведения звуковых сигналов | 1986 |
|
SU1411816A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2006 |
|
RU2306526C1 |

Изобретение относится к измерительной технике. Цель изобретения - расширение диапазона измерений, повышение точности и расширение функциональных возможностей путем определения наряду с величиной перемещения направления поворота объекта и его нулевого положения. Перед началом измерений зеркало 4, установленное на объекте, находится в нулевом положении, которое фиксируется фотоприемником 6. При угловом перемещении объекта зеркало отклоняется на угол ±αоб от нулевого положения. Отклонение +αоб измеряется первой группой из N световодов, отклонения -αоб - второй группой из N световодов. Каждая из групп световодов соединена с фотоприемником 8 и расположена симметрично относительно 2N+1 световода, связанного с фотоприемником 6. 2 ил.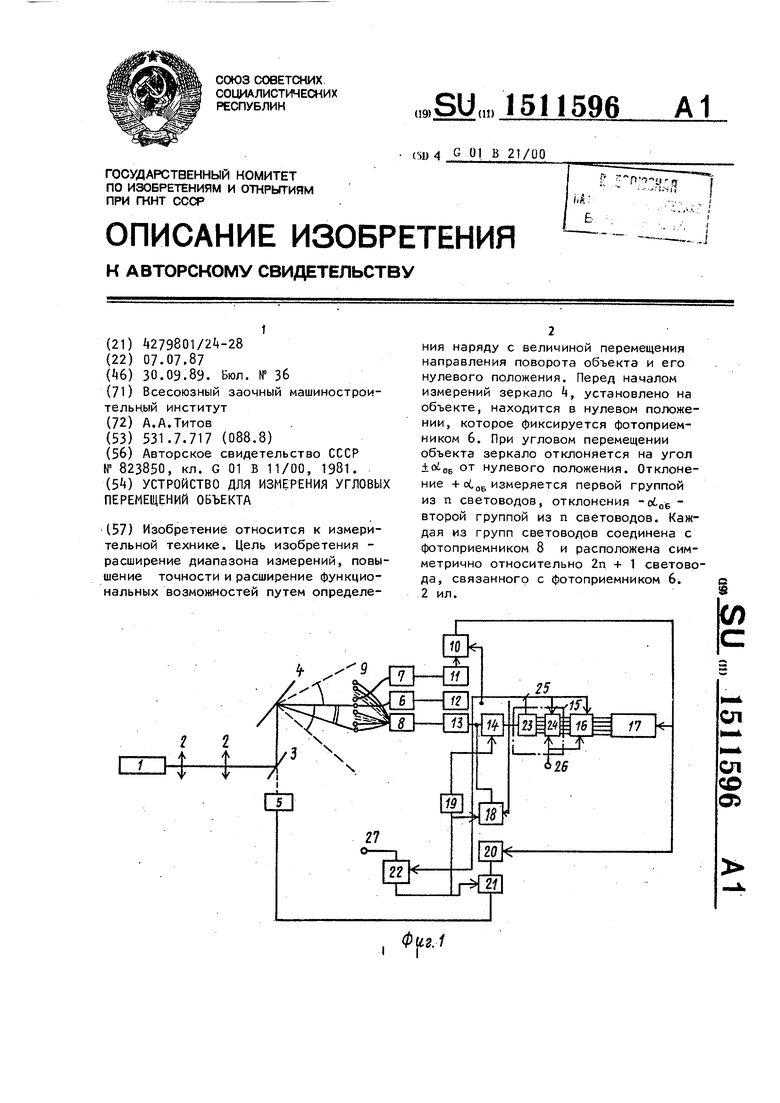
| Устройство контроля угловыхпЕРЕМЕщЕНий | 1979 |
|
SU823850A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
