сриг./
выходе при отсутствии полосы сохраняется нулевой сигнал, независимо от значения сигнала на первом его входе, соединенном с датчиком 1 скорости.
31513 89
Изобретение относится к автоматиза-ключ 4 поступает на первый вход интег- ции-технологических процессоЕз и служитратора 7. При нулевом сигнале на пер- для контроля за перемещением изделий,вом входе интегратор 7 находится в ре- преимущественно длинномерных, на объ- грех{имё Запоминание, поэтому на его ектах, где затруднена или невозможна установка датчиков наличия изделия вдоль технологической линии, по которой перемещают изделие,
Цель изобретения - упрощение уст- 10При появлении переднего конца полосы
ройства. .8 пocлeдf eй клети стана срабатывает
На фиг.1 представлена схема устрой-датчик 2, на прямом выходе его появляства; на фиг,2 - схема блока коррек-ется единичный сигнал, по положительции. ному перепаду этого сигнала (т.е. по
Устройство содержит датчик 1 скоро-15перепаду нуль - единица) формирователь
сти (перемещения изделия), датчики 25 вырабатывает короткий импульс, котои 3 наличия изделия, ключ k, формиро-рый через элемент ИЛИ 6 поступает на
ватель 5 импульсов, элемент ИЛИ 6, ин-второй вход интегратора 7 Этот имтегратор 7, блок 8 коррекции, компара-пульс сброса не изменяет состояния
торы 9-1, ,,.. ,9-К, где К число 20интегратора, так как он до этого уже
сечений технологической линии, триг-находился в исходном состоянии. Еди- геры 10-1 , 10-2,..., 10-К. Входы ключа k соединены с выходами датчика 2 и триггера 10-К.
Блок 8 коррекции (фиг.-2) содержит третий вход интегратора 7 поступазадатчик I l , сумматоры 12 и 13, блокет сигнал скорости полосы от датчика
Н деления, формирователь 15 импуль-1. Следовательно, с момента появления
сов, интегратор 16 и блок 17 умноже-переднего конца полосы в зоне датчика
ния,2 наличия выходной сигнал 1 интеграУставки (уровни срабатывания) ком- тора 7 начинает возрастать от нуля параторов 9-1, 9-2,.,.,9-К различныи будет соответствовать пути, прохо- и соответствуют расстояниям до соот-димому передним концом полосы по ветствующих сечений от намала отсчета.-рольгангу, т,е, текущему местоположе- За начало отсчета (начало участка);Нию переднего конца полосы. Этот сиг- принимается сечение технологической 35нал 1 через блок 8 коррекции поступа- линии,, в котором установлен датчик 2 наличия изделия. В случае, если рассматриваемым участком является отводящий рольганг прокатного стана,, то дат-,,янию до первого сечения (от начала чи.ком 2. может быть датчик наличия прО 40рольганга) , срабатывает компаратор катываемой полосы в последней клетиЭ , выдавая единичный сигнал на пер- стана. .Датчик 3 наличия изделия уста-вый,, счетный, вход триггера 10-1, навливают в некотором сечении рольган-Триггер 10-1-переходит в единичное га, где возможна надежная фиксациясостояние, фиксируя появление передне- наличия полосы, В качестве датчика 1 45го конца полосы в первом сечении,При
ничный сигнал, поступающий от датчика 2 на первый вход интегратора 7, переводит его в режим Интегрирование,
ет на входы компараторов 9-1 ,9-2,..., 9-К,, Когда уровень сигнала 1 достигнет ве7 1ичины, соответствующей расстовыходе при отсутствии полосы сохраняется нулевой сигнал, независимо от значения сигнала на первом его входе, соединенном с датчиком 1 скорости.
ключ 4 поступает на первый вход интег- ратора 7. При нулевом сигнале на пер- вом входе интегратор 7 находится в ре- рех{имё Запоминание, поэтому на его
находился в исходном состоянии. Еди-
На третий вход интегратора 7 поступаничный сигнал, поступающий от датчика 2 на первый вход интегратора 7, переводит его в режим Интегрирование,
тора 7 начинает возрастать от нуля и будет соответствовать пути, прохо- димому передним концом полосы по -рольгангу, т,е, текущему местоположе- Нию переднего конца полосы. Этот сиг- нал 1 через блок 8 коррекции поступа- янию до первого сечения (от начала рольганга) , срабатывает компаратор , выдавая единичный сигнал на пер- вый,, счетный, вход триггера 10-1, Триггер 10-1-переходит в единичное состояние, фиксируя появление передне- го конца полосы в первом сечении,При
ет на входы компараторов 9-1 ,9-2,..., 9-К,, Когда уровень сигнала 1 достигнет ве7 1ичины, соответствующей рассто
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления ускоренным охлаждением проката | 1987 |
|
SU1507483A1 |
| Способ управления ускоренным охлаждением проката и устройство для его осуществления | 1988 |
|
SU1547901A1 |
| Устройство для счета штучных предметов, перемещаемых конвейером | 1987 |
|
SU1472930A1 |
| Устройство управления безупорным мерным резом полосы | 1978 |
|
SU774832A1 |
| Устройство для счета предметов,переносимых конвейером | 1982 |
|
SU1072076A1 |
| РАДИОЛУЧЕВОЙ ДАТЧИК ОХРАНЫ | 1992 |
|
RU2079889C1 |
| Устройство коррекции скорости охлаждения горячекатаной полосы | 1980 |
|
SU931255A1 |
| Интегрирующий аналого-цифровой преобразователь | 1985 |
|
SU1279069A1 |
| Устройство для автоматического контроля "забоя" проката в профилегибочном стане | 1982 |
|
SU1015947A1 |
| Адаптивный аналого-цифровой преобразователь | 1984 |
|
SU1226666A1 |
Изобретение относится к области автоматизации технологических процессов. Целью изобретения является упрощение устройства. Устройство содержит датчик 1 скорости, датчики 2 и 3 наличия изделия, ключ 4, формирователь 5 импульсов, элемент ИЛИ 6 интегратор 7, блок 8 коррекции, компараторы 9-1...9-K и триггеры 10-1...10-K. Изобретение позволяет контролировать положение изделия на участках технологической линии, где установка датчиков наличия изделия невозможна. 1 з.п. ф-лы, 2 ил.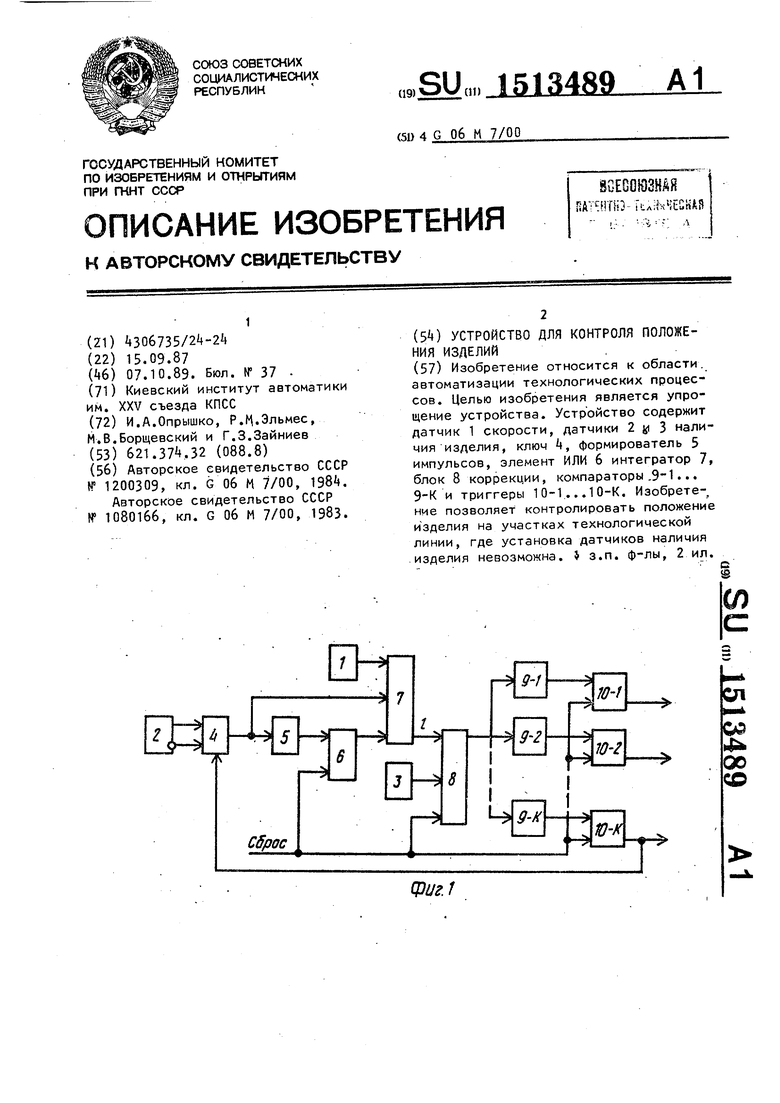
скорости может быть использован датчик скорости роликов рольганга.
Устройство работает следующим образом.
Перед началом работы импульсом Сброс интегратор 7 (через элемент ИЛИ 6), блок 8 коррекции и триггеры 10-1,10-2J,.,, устанавливают в исходное состояние с нулевыми сигналами на.их выходах. При этом выход клю-55 ча k соединен с прямым выходом датчи- ка 2, При отсутствии полосы в зоне . датчика 2 на прямом выходе его име- .ется нулевой сигнал, который через
50
дальнейшем перемещении полосы аналогично срабатывают компараторы 9-2,,,,, и триггеры 10-2,,,,,10-К, Таким образом, поочередное появление единич- ных сигналов на выходах триггеров
10-1, 10-2,,,.,10-К будет свидетельствовать о перемещении переднего конца полосы по рольгангу.
Действительное местоположение поло- ,сы может не соответствовать вычисляемому этим способом а частности из-за погрешностей в измерении скорости полосы. Это несоответствие устраняется
с помощью блока 8 коррекции и датчика 3 наличия изделия. В том случае, если в момент появления полосы в зоне датчика 3 уровень сигнала 1 на выходе интегратора 7 будет соответствовать расстоянию от начала рольганга до датчика 3, то сигнал 1 проходит на выход блока В без изменений, а в случае несоответствия блок 8 корректирует вели- д чину выходного сигнала.
После появления в К-м сечении передний конец полосы входит в моталку, полоса начинает сматываться в рулон,
а задняя часть полосы продолжает про- 15 При этом единичный сигнал каждого комкатываться в клетях. При этом весь рольганг занят полосой, на выходах всех триггеров сигналы равны единице, При этом в момент появления единичного
ратор 9-К, его единичный выходной сигнал возвращает триггер 10-К в исходное состояние, выходной нулевой сигнал которого возвращает ключ f в исходное состояние.
сигнала на выходе триггера 10-К пере- 20 в конце рольганга, срабатывает компа- ключается ключ и на первый вход интегратора 7 начинает поступать нулевой сигнал с инверсного выхода датчика 2 наличия изделия. Интегратор переходит в режим Запоминание, при котором 25 его выходной, сигнал сохраняется неизменным. Формирователь 5.не реагирует на перепад единица - нуль входного сигнала. В дальнейшем, при завершении процесса прокатки данной полосы, в мо-зо мент выхода заднего конца ее из последней клети на инверсном выходе датчика 2 наличия изделия появляется единичный сигнал, формирователь 5 по поТаким образом, по мере перемещения переднего конца полосы по рольгангу на выходах-триггеров поочередно появляются единичные сигналы,а заТем, по мере перемещения по рольгангу заднего конца изделия, выходные сигналы триггеров поочередно принимают нулевое значение, т.е. выходной сигнал любого триггера равен единице при наличии изделия в соответствующем сечении и равен нулю при отсутствии изделия в этом сечении.
ложительному перепаду входного сигнала,. вырабатывает короткий импульс, который
Таким образом, по мере перемещен переднего конца полосы по рольгангу на выходах-триггеров поочередно поя ляются единичные сигналы,а заТем, п мере перемещения по рольгангу задне конца изделия, выходные сигналы три геров поочередно принимают нулевое значение, т.е. выходной сигнал любо триггера равен единице при наличии изделия в соответствующем сечении и равен нулю при отсутствии изделия в этом сечении.
При появлении в последней клети
.через элемент ИЛИ 6 поступает на второй вход интегратора 7 и сбрасывает в нуль его выходной сигнал (интегратор 7 переводится в режим Сброс при едй-дп переднего конца следующей полосы на
ничном сигнале на втором входе незави- прямом .выходе датчика 2 появляется симо от уровня сигнала на других входах). Выходной сигнал блока 8 также принимает нулевое значение, сбрасываются в нуль и компараторь 9-1, 9-2, ...,9-К,
45
единичный сигнал, поступающий через ключ k в формирователь 5 и на первы вход интегратора 7. Импульс формиро вателя 5 сбрасывает интегратор 7, который после этого переходит в режи Интегрирование по единичному сигна лу на первом входе, и устройство начинает определять местоположение переднего конца полосы. Дальнейшая работа устройства по контролю положени этой и последующих полос аналогична описанному ранее.
Изменение выходных сигналов компараторов с единичного значения в нулевое не изменяет состояния триггеров 10-1, 10-2,,..,10-К и на их выходах сохраняются единичные сигналы. По завершении кратковременного импульса формирователя 5 интегратор 7 переходи в режим Интегрирование, так как на второй вход его поступает единичный . сигнал с инверсного выхода датчика 2, В соответствии с сигналом скорости полосы, поступающим от датчика 1,
д
тегратор 7 наминает формировать выходной сигнал, который соответствует пути, проходимому задним концом полосы. Этот сигнал через блок 8 коррекции поступает на входы компараторов, которые поочередно, по мере возрастания уровня выходного сигнала блока 8 в соответствии с перемещением заднего конца полосы, срабатывают, формируя единичные выходные сигналы. При прохождении задним концом полосы первого сечения срабатывает компаратор 9-1, второго сечения компаратор 9-2 и т.д.
паратора поступает на счетный вход соответствующего триггера, возвращая его в исходное состояние. Когда задний конец полосы достигает К-го сечения
ратор 9-К, его единичный выходной сигнал возвращает триггер 10-К в исходное состояние, выходной нулевой сигнал которого возвращает ключ f в исходное состояние.
в конце рольганга, срабатывает компа-
в конце рольганга, срабатывает компа-
Таким образом, по мере перемещения переднего конца полосы по рольгангу на выходах-триггеров поочередно появляются единичные сигналы,а заТем, по мере перемещения по рольгангу заднего конца изделия, выходные сигналы триггеров поочередно принимают нулевое значение, т.е. выходной сигнал любого триггера равен единице при наличии изделия в соответствующем сечении и равен нулю при отсутствии изделия в этом сечении.
При появлении в последней клети
переднего конца следующей полосы на
прямом .выходе датчика 2 появляется
5
единичный сигнал, поступающий через ключ k в формирователь 5 и на первый вход интегратора 7. Импульс формирователя 5 сбрасывает интегратор 7, который после этого переходит в режим Интегрирование по единичному сигналу на первом входе, и устройство начинает определять местоположение переднего конца полосы. Дальнейшая работа устройства по контролю положения этой и последующих полос аналогична описанному ранее.
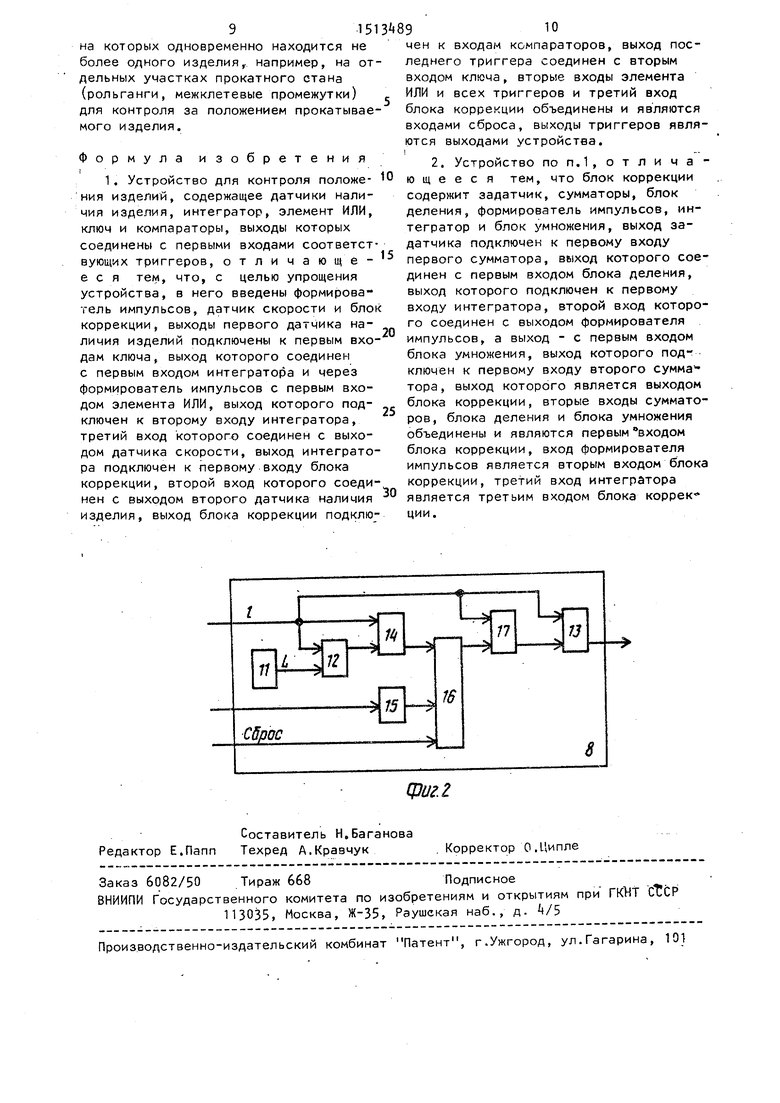
Блок 8 коррекции (фиг,2) работает следующим образом.
Задатчиком 11 устанавливают уро - вень сигнала, соответствующий расстоянию L до датчика 3 наличия изделия от начала рольганга. Перед началом
работы по сигналу Сброс, поступающему на третий вход блока 8, интегратор 16 устанавливается в исходное состояние с нулевым сигналом на выходе. Из „ формирователя 15 поступает нулевой сигнал на второй.вход интегратора 1б, поэтому он после завершения сигнала Сброс находится в режиме запоминания, т.е. сохраняется нулевой выходной о сигнал интегратора .16. После появления переднего конца полосы на рольганге начинает.возрастать сигнал 1, поступающий на первый вход блока 8 из интегратора 7. До прихода полосы в сече-15 отрицательное значение, т.е. в суммание датчика 3 наличия изделия на входе и выходе формирователя .15 и, следовательно, На выходе интегратора 1б сохраняются нулевые сигналы, поэтому
равен нулю и выходной сигнал блока 17 20 сы из сечения датчика 3 состояние фор- умножения, а входной сигнал 1 блока 8 мирователя 15 не изменяется, интегратор 1б остается в режиме запоминания, сохраняя на выходе сигналов.. При появлении второй полосы местоположение ее вычисляется с учетом запомненного си1- нала л на предыдущей полосе. Если к моменту появления этой полосы в сечении датчика 3 окажется, что ошибка определения местоположения ее полно, стью не устранена (имеется разность А На выходе сумматора 12), то блок В, работая аналогично описанному, корректирует величину сигнала rjs на выходе интегратора 1б в зависимости от величерез сумматор 13 без изменений проходит на выход блока 8. В сумматоре 12 первый вход является инверсным, вто- рой - прямым, поэтому на выходе его 25 формируется , Если в момент появления переднего конца полосы в сечении датчика 3 разность , это свидетельствует о том, что местонахождение полосы вычисляется правильно. В этот 30 момент по переднему фронту единичного сигнала датчика 3 формирователь 15 вырабатывает короткий импульс, соответствующий постоянной времени интегрирования интегратора 16, который на ь и знака разности А и тем самым
время действия этого импульса переводится в режим интегрирования. Так как при этом разность , то равен кулю и выходной сигнал блока Н деления. Поэтому выходной сигнал интегратора до 16 остается равным нулю. Равен нулю и выходной сигнал блока 17 умножения, т.е. входной сигнал 1 блока 8 через сумматор 13 передается на выход без изменений.45
i
Если в момент t появления переднего 1конца полосы в сечении датчика.3 разность А больше нуля, то это свидетельствует, что местоположение полосы вычисляется с отставанием. Во время действия кратковременного импульса формирователя 15 на первый вход интегратора 1б прикладывается сигнале6 А/1, формируемый в блоке l4 деления и пред- , ставляющий собой относительную ошибку вычисления местоположения полосы. Здесь l значение сигнала 8 в момент t . Так как длительность импульса формирователя 15 равна постоянной рирования интегратора 1б, то к моменту окончания импульса выходной сигнал интегратора возрастает до величины cL и запоминается после прекращения импульса, В дальнейшем текущий сигнал 1 в блоке 17 умножается на запомненный сигналов-, формируя необходимую поправку, которая в сумматоре 13 складывается с текущим значением 1, Если в момент S значение А было меньше нуля, т.е. местоположение полосы вычисляется с опережением, то сигнал (Si имеет
торе 13 необходимая поправка вычитается из текущего значения 1. Таким образом корректируется вычисляемое местоположение полосы. При уходе полосы из сечения датчика 3 состояние фор- мирователя 15 не изменяется, интегратор 1б остается в режиме запоминания, сохраняя на выходе сигналов.. При появлении второй полосы местоположение ее вычисляется с учетом запомненного си1- нала л на предыдущей полосе. Если к моменту появления этой полосы в сечении датчика 3 окажется, что ошибка определения местоположения ее полно, стью не устранена (имеется разность А На выходе сумматора 12), то блок В, работая аналогично описанному, корректирует величину сигнала rjs на выходе интегратора 1б в зависимости от велиповышает точность определения местоположения полосы. При появлении каждой следующей полосы процесс повторяется.
Выходные сигналы устройства могут быть использованы в-мнемосхеме для индикации прохождения изделия по рольгангу, в системе управления технологическим процессом (например, для включения и выключения секций установки охлаждения,через которые охлаждающая вода поступает на полосу для охлаждения ее до заданной температуры), в системе умета изделий. , Таким образом, устройство позволяет контролировать положение изделия на участках технологической линии, где установка датчиков наличия изделия в промежуточных сечениях невозможна, например, в установках водя.ног.о охлаждения проката.
Изобретение целесообразно использовать на участках технологических линий, протяженность которых не превы- шает длину перемещаемого изделия, и
на которых одновременно находится не более одного изделия, например, на отдельных участках прокатного стана (рольганги, межклетевые промежутки) для контроля за положением прокатывае- мого изделия.
Формула изобретения
I
ния изделий, содержащее датчики наличия изделия, интегратор, элемент ИЛИ, ключ и компараторы, выходы которых соединены с первыми входами соответствующих триггеров, отличаю щее с я тем, что, с целью упрощения устройства, в него введены формирователь импульсов, датчик скорости и бло коррекции, выходы первого датчика наличия изделий подключены к первым входам ключа, выход которого соединен с первым входом интегратора и через формирователь импульсов с первым входом элемента ИЛИ, выход которого подключен к второму входу интегратора, третий вход которого соединен с выходом датчика скорости, выход интегратора подключен к первому входу блока коррекции, второй вход которого соединен с выходом второго датчика наличия изделия, выход блока коррекции подклю
10
0
0
5
0
чен к входам компараторов, выход последнего триггера соединен с вторым входом ключа, вторые входы элемента ИЛИ и всех триггеров и третий вход блока коррекции объединены и являются входами сброса, выходы триггеров являются выходами устройства.
