Вид
W
ел
а со
7 8 и Ч 3638 45 50 V3 51 51 53 Фаг. г
Изобретение относится к машино- стройиию и может быть использовано при создании аптоматизирова1П1ых производственных систем для испытания механических свойств заготовок в металлургических, механообрабатывающих сборочно-сварочных производствах.
Цель изобретения - повышение достоверности результатов испытаний, производительности, а также техники безопасности.
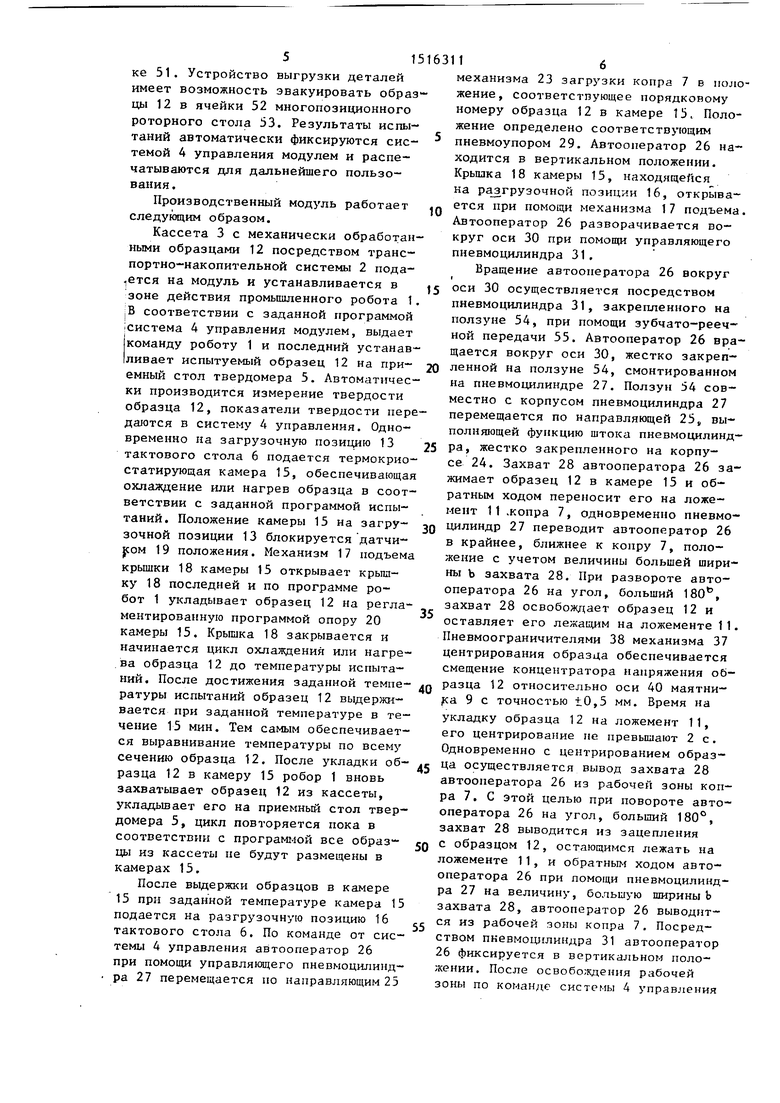
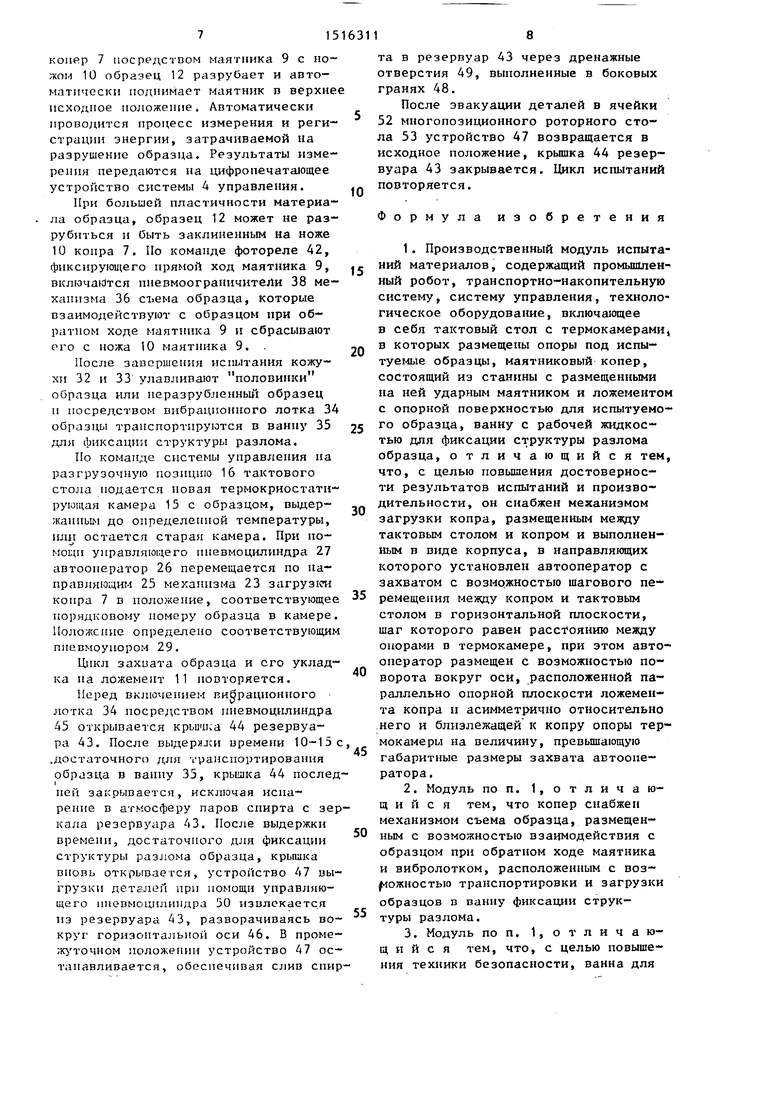
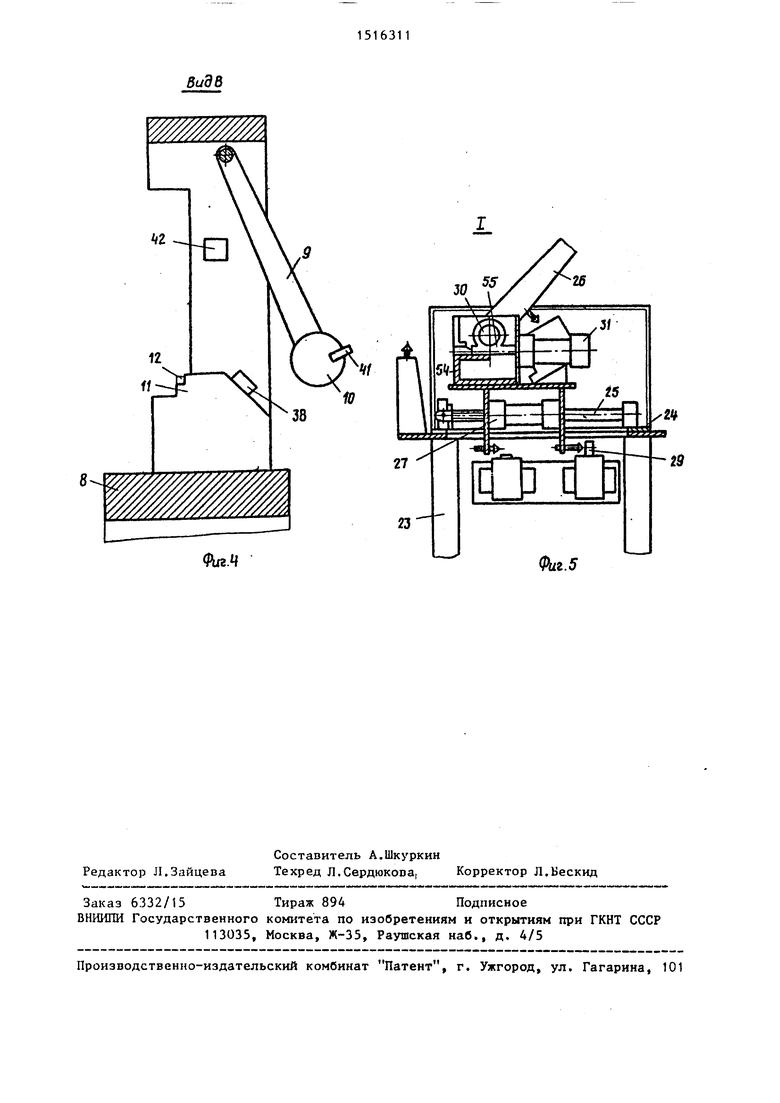
На фиг. 1 изображен производственный модуль испытаний, план; на фиг. 2 - вид Л на фиг. 1; на фиг.З - вид Б на фиг. 2; на фиг. 4 - вид В на фиг. 1; па фиг. 5 - узел I на фиг. 2.
Производственный модуль испытаний 1-1атериалов содержит промышленный ро
бот 1, траиспортно-пакопительную систему 2, с кассетой 3, систему 4 управления модулем, технологи,ческое оборудование, включающее твердомер 5, стол 6 тактовый и маятниковый копер 7, представляющий собой станину 8 с размещенными па пей ударным маятником 9, на конце которого смонтирован нож 10, и ложементом 11 для уладки испытательного образца 12. Робот 1 смонтирован так, что имеет возможность обслуживать твердомер 5 и загрузочную позицию 13 тактового стола 6. На транспортных пластинах 14 тактового стола 6 с возможностью кругового реверсивпого движения смонтированы
Iтермокриостатнрующие камеры 15, чис- ho которых определяется диапазоном температур испытательного образца 12. Между транспортными пластинами 14 тактового стола 6 на загрузочной и разгрузочной позициях 13 и 16 установлены механизмы 17 подъема крышк1 18 термокриостатирующих камер 15 и датчики 19 положения, адекватно вазимодействующие с соответствующими термокриостатитующими камерами 15. Внутри термокриостатирующих камер 15 жестко закреплены опоры 20 для размещения испытательных образцов 12, опорная плоскость 21 которых параллельпа опорной плоскости 22 ложемента 11 копра 7. Опоры 20 разнесены в термокриостатирующих камерах 15 с шагом t (фиг. 2). Между тактовым столом 6 и маятниковым копром 7 размещен механизм 23 загрузки копра выполненный в виде корпуса 24, в на
5
0
5
0
5
0
5
0
5
правляющих 25 которого установлен автооператор 26 с возможностью шагового перемещения в горизонтальной плоскости посредством пневмоцилиндра 27 и взаимодействия его захвата 28 с испытательным образцом 12. При этом величина шагового перемещения равна шагу t расстановки опор 20 в термокриостатирующих камерах 15. Для фиксации положения автооператора 26 при шаговом перемещении предназначены пневмоупоры 29 (фиг. 5). Автооператор 26 имеет возможность поворота на угол, больший 180, вокруг оси 30 (фиг. 5) с помощью управляющего пневмоцилиндра 31. Ось 30 поворота автооператора 26 параллельна опорной плоскости 22 ложемента 11 копра 7 и расположена асимметрично относительно него и ближней к копру 7 опоры 20 термокриостатирующей камеры 15 на величину, большую ширины b захвата 28 автооператора 26.
На станине 8 копра 7 размещены кожухи 32 и 33 для улавливания разлетающихся при ударе половинок образцов 12. В нижней части кожухов 32 и 33 размещен вибрационный лоток 34, обеспечивающий транспортирование половинок образцов 12 в ванну 35 для фиксации структуры разлома.
На ложементе 11, жестко смонтированном на станине 8, размещены механизм 36 съема образца и механизм 37 центрирования образца, представляю- дие собой пневмоограничители 38 с убирающимися упорами 39, смонтированными симметрично относительно оси 40 маятника 9. Пневмоограничители 38 механизма 36 съема образца имеют возможность взаимодействия с образцом 41 (фиг. 4), заклинившим на ноже 10 маятника 9 только на обратном ходе маятника, а команда на их срабатывание поступает от фотореле 42, жестко закрепленного на станине 8, при прямом ходе маятника 9.
Ванна 35 представляет собой герметичный резервуар 43 с откидывающейся крьш1кой 44, управляемой пневмоци- линдром 45. Внутри ванны с возможностью вращения вокруг горизонтальной оси 46 установлено устройство 47 выгрузки деталей, на боковых гранях 48 которого выполнены отверстия 49. Устройство 47 управляется пневмоцилинд- ром 50,.Ванна 35 для фиксации структуры металла установлена на подстав515
ке 51. Устройство выгрузки деталей имеет возможность эвакуировать образцы 12 в ячейки 52 многопозиционного роторного стола 53. Результаты испытаний автоматически фиксируются системой 4 управления модулем и распечатываются для дальнейшего пользования.
Производственный модуль работает следующим образом.
Кассета 3 с механически обработанными образцами 12 посредством транс- портно-накопительной системы 2 пода- атся на модуль и устанавливается в зоне действия промьшшенного робота 1 IВ соответствии с заданной программой Система 4 управления модулем, выдает команду роботу 1 и последний устанавливает испытуемый образец 12 на приемный стол твердомера 5. Автоматически производится измерение твердости образца 12, показатели твердости пере дшотся в систему 4 управления. Одновременно на загрузочную позицию 13 тактового стола 6 подается термокрио- статируюцая камера 15, обеспечивающая охлаждение или нагрев образца в соответствии с заданной программой испытаний. Положение камеры 15 на загрузочной позиции 13 блокируется датчи- ом 19 положения. Механизм 17 подъема
крышки 18 камеры 15 открывает крышку 18 последней и по программе робот 1 укладывает образец 12 на регламентированную программой опору 20 камеры 15. Крышка 18 закрывается и начинается цикл охлаждения или нагрева образца 12 до температуры испытаний. После достижения заданной температуры испытаний образец 12 выдерживается при заданной температуре в течение 15 мин. Тем самым обеспечивается выравнивание температуры по всему сечению образца 12. После укладки образца 12 в камеру 15 робор 1 вновь захватывает образец 12 из кассеты, укладьшает его на приемный стол твердомера 5, цикл повторяется пока в соответствии с програм1-юй все образцы из кассеты не будут размещены в камерах 15.
После выдержки образцов в камере 15 при заданной температуре камера 15 подается на разгрузочную позицию 16 тактового стола 6. По команде от системы 4 управления автооператор 26 при помощи управляющего пневмоцилинд- ра 27 перемещается по направляющим 25
10
63116
механизма 23 загрузки копра 7 в положение, соответствующее порядковому номеру образца 12 в камере 15. Положение определено соответствующим 5 пневмоупором 29. Автооператор 26 находится в вертикальном положении. Крышка 18 камеры 15, находящейся на разгрузочной позиции 16, открывается при помощи механизма 17 подъема. Автооператор 26 разворачивается вокруг оси 30 при помощи управляющего пневмоцилиндра 31,
Вращение автооператора 26 вокруг I
5 оси 30 осуществляется посредством пневмоцилиндра 31, закрепленного на ползуне 54, при помощи зубчато-реечной передачи 55. Автооператор 26 вращается вокруг оси 30, жестко закреп0 ленной на ползуне 54, смонтированном на пневмоцилиндре 27. Ползун 54 совместно с корпусом пневмоцилиндра 27 перемещается по направляющей 25, выполняющей функцию штока пневмоцилинд-
5 ра, жестко закрепленного на корпусе 24. Захват 28 автооператора 26 зажимает образец 12 в камере 15 и обратным ходом переносит его на ложемент 11 .копра 7, одновременно пневмо-
0 цилиндр 27 переводит аптооператор 26 в крайнее, ближнее к копру 7, положение с учетом величины большей ширины b захвата 28. При развороте автооператора 26 на угол, больший , захват 28 освобождает образец 12 и оставляет его лежащим на ложементе 1 1. Пневмоограничителями 38 механизма 37 центрирования образца обеспечивается смещение концентратора напряжения об-
JQ разца 12 относительно оси 40 маятни- ;са 9 с точностью ±0,5 мм. Время на
укладку образца 12 на ложемент 11, его центрирование не превышают 2 с. Одновременно с центрированием образ-
5 ца осуществляется вывод захвата 28 автооператора 26 из рабочей зоны копра 7, С этой целью при повороте автооператора 26 на угол, больший 180°, захват 28 выводится из зацепления
0 с образцом 12, остающимся лежать на ложементе 11, и обратным ходом авто- оператора 26 при помощи пневмоцилиндра 27 на величину, большую ширины b захвата 28, автооператор 26 выводптс ся ИЗ рабочей зоны копра 7. Посредством пневмоцялиндра 31 автооператор 26 фиксируется в вертикальном положении. После освобо;вденля рабочей зоны по команде системы 4 управления
5
коиер 7 посредством маятника 9 с но- ;хо1-1 10 образец 12 разрубает и автоматически поднимает маятник п верхнее исходное положение, Автоматически проводится процесс измерения и регистрации энергии, затрачиваемой на разрушение образца. Результаты измерения передаются на цифронечатающее устройство системы 4 управления.
При большей пластичности материала образца, образец 12 может не раз- рубиться и быть заклиненным на ноже 10 конра 7. По команде фотореле 42, фиксирующего прямой ход маятника 9, включаются нневмоограничители 38 механизма 36 съема образца, которые взаимодействуют с образцом при обратном ходе маятника 9 и сбрасывают его с ножа 10 маят1Н1ка 9. .
После завершения испытания кожухи 32 и 33 улавливают половинки образца или неразрубленньш образец п посредством вибрационного лотка 34 образцы транспортируются в ванну 35 для фиксации структуры разлома.
По команде системы управления на разгрузочную позицию 16 тактового стола подается новая термокриостати- рующая камера 15 с образцом, выдержанным до определенной температуры, или остается старая камера. При ио- моци управляющего пневмоцилиндра 27 автооператор 26 перемещается по направляющим 25 механизма 23 загрузют копра 7 в положение, соответствующее порядковому номеру образца в камере. Положение определено соответствующим пневмоупором 29.
Цднсл захвата образца и его укладка на ложемент 11 повторяется.
Перед включением вибрационного лотка 34 посредством гн1евмоцилиндра 45 открывается крьи пса 44 резервуара 43. После выдеряла времени 10-15 с, .достаточного для транспортирования образца в ванну 35, крышка 44 последней закрывается, исключая испарение в атмосферу паров спирта с зеркала резервуара 43. После выдержки времени, достаточного для фиксации структуры pa3JiOMa образца, крышка вновь открывается, устройство 47 выгрузки деталей при помощи управляющего иневмоцилипдра 50 извлекается из резервуара 43, разворачиваясь вокруг горизонтальной оси 46. В проме- , точном положении устройство 47 останавливается, обеспечивая слив спир15163118
та в резервуар 43 через дренажные отверстия 49, выполненные в боковых гранях 48.
После эвакуации деталей в ячейки 52 многопозиционного роторного стола 53 устройство 47 возвращается в исходное положение, крышка 44 резервуара 43 закрывается. Цикл испытаний повторяется.
10
15
20
25
30
35
40
45
50
55
Формула изобретения
1.Производственный модуль испытаний материалов, содержащий промьшшен- ный робот, транспортно-накопительную систему, систему управления, технологическое оборудование, включающее
в себя тактовый стол с термокамерами, в которых размещены опоры под испытуемые образцы, маятниковый копер, состоящий из станины с размещенными на ней ударным маятником и ложементом с опорной поверхностью для испытуемого образца, ванну с рабочей жидкостью для фиксации структуры разлома образца, отличающийся тем, что, с целью повышения достоверности результатов испытаний и производительности, он снабжен механизмом загрузки копра, размещенным между тактовьи столом и копром и выполненным в виде корпуса, в направляющих которого установлен автооператор с захватом с возможностью щагового перемещения между копром и тактовым столом в горизонтальной плоскости, шаг которого равен расстоянию между опорами в термокамере, при этом автооператор размещен с возможностью поворота вокруг оси, расположенной па раллельно опорной плоскости ложемента копра п асимметрично относительно .него и близлежащей к копру опоры термокамеры на величину, превьш1ающую габаритные размеры захвата автооператора.
2.Модуль по п. 1,отличаю- щ и и с я тем, что копер снабжен механизмом съема образца, размещенным с возможностью взаимодействия с образцом при обратном ходе маятника и вибролотком, расположенным с воз- ожностью транспортировки и загрузки образцов в ванну фиксации структуры разлома.
3.Модуль по п. 1, о т л и ч а ю- щ и и с я тем, что, с целью повышения техники безопасности, ванна для
5
0
5
0
5
0
5
0
5
Формула изобретения
1.Производственный модуль испытаний материалов, содержащий промьшшен- ный робот, транспортно-накопительную систему, систему управления, технологическое оборудование, включающее
в себя тактовый стол с термокамерами, в которых размещены опоры под испытуемые образцы, маятниковый копер, состоящий из станины с размещенными на ней ударным маятником и ложементом с опорной поверхностью для испытуемого образца, ванну с рабочей жидкостью для фиксации структуры разлома образца, отличающийся тем, что, с целью повышения достоверности результатов испытаний и производительности, он снабжен механизмом загрузки копра, размещенным между тактовьи столом и копром и выполненным в виде корпуса, в направляющих которого установлен автооператор с захватом с возможностью щагового перемещения между копром и тактовым столом в горизонтальной плоскости, шаг которого равен расстоянию между опорами в термокамере, при этом автооператор размещен с возможностью поворота вокруг оси, расположенной па раллельно опорной плоскости ложемента копра п асимметрично относительно .него и близлежащей к копру опоры термокамеры на величину, превьш1ающую габаритные размеры захвата автооператора.
2.Модуль по п. 1,отличаю- щ и и с я тем, что копер снабжен механизмом съема образца, размещенным с возможностью взаимодействия с образцом при обратном ходе маятника и вибролотком, расположенным с воз- ожностью транспортировки и загрузки образцов в ванну фиксации структуры разлома.
3.Модуль по п. 1, о т л и ч а ю- щ и и с я тем, что, с целью повышения техники безопасности, ванна для
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ИСПЫТАНИЯ ПОЛИМЕРНЫХ МАТЕРИАЛОВ | 1971 |
|
SU298539A1 |
| Маятниковый копер для ударных испытаний | 1982 |
|
SU1080066A1 |
| Копер для ударных испытаний | 1982 |
|
SU1037138A1 |
| Маятниковый копер для ударных испытаний | 1982 |
|
SU1048369A1 |
| МАЯТНИКОВЫЙ КОПЕР ДЛЯ ИСПЫТАНИЯ ОБРАЗЦОВ МАТЕРИАЛОВ ПОВТОРНЫМИ УДАРАМИ | 2016 |
|
RU2631528C1 |
| МАЯТНИКОВЫЙ КОПЕР ДЛЯ ИСПЫТАНИЯ НА УДАРНУЮВЯЗКОСТЬ | 1965 |
|
SU167339A1 |
| МАЯТНИКОВЫЙ КОПЕР ДЛЯ ИСПЫТАНИЯ ОБРАЗЦОВ МАТЕРИАЛОВ ПРИ УДАРНОМ НАГРУЖЕНИИ | 2018 |
|
RU2682845C1 |
| МАЯТНИКОВЫЙ КОПЕРI ;';.;'f'^->&T.^''-'''^"^^"' • •''•'1 БМБЛИО'^еЧй | 1972 |
|
SU352186A1 |
| Маятниковый копер для испытаний металлов на ударную вязкость | 1977 |
|
SU619824A1 |
| Маятниковый копер для испытаний образцов на ударное растяжение | 1977 |
|
SU726470A1 |
Изобретение относится к машиностроению и может быть использовано при создании автоматизированных производственных систем для испытания механических свойств заготовок в металлургических, механообрабатывающих, сборочно сварочных производствах. Целью изобретения является повышение достоверности результатов испытаний, производительности, а также техники безопасности. Между тактовым столом 6 и маятниковым копром 7 размещен механизм загрузки 23 копра. Автооператор 26 механизма загрузки 23 берет образец 12, находящийся в термокриостатирующей камере 15 и устанавливает его на копр 7, где происходит механическое воздействие на него. После разрушения образца части последнего по вибролотку 34 транспортируются и загружаются в ванну 35 для фиксации структуры разлома, откуда части образца перегружаются устройством выгрузки деталей 47 в ячейки 52 многопозиционного роторного стола 53. 3 з.п. ф-лы, 5 ил.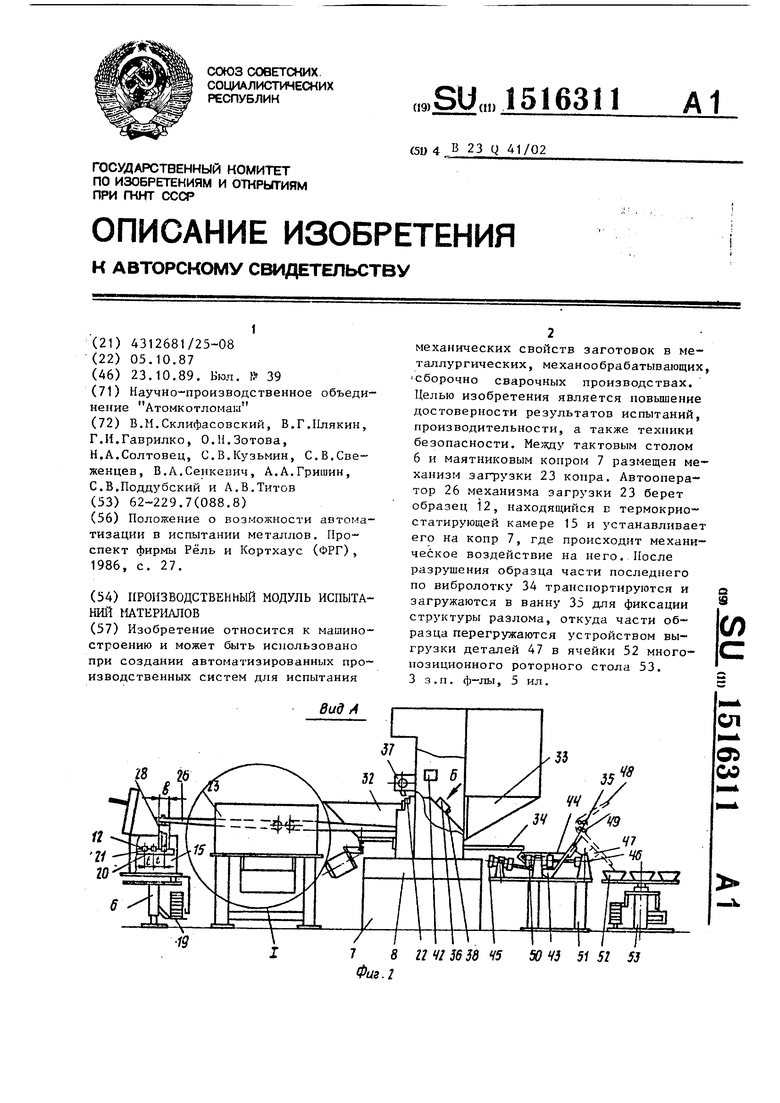
дидб
35
ФигМ
П С 3
23
Фиг.5
| Положение о возможности автоматизации в испытании металлов | |||
| Проспект фирмы Рель и Кортхаус (ФРГ), 1986, с | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
