висимостью: е
-M«K.cos(iv/2), где R - радиус кривошипов, i - передаточное отношение между кривошипом и ротором, If- угловой размер лопасти. Изменением эксцентриситета изменяются объемы
рабочих полостей, что позполяет регулировать объемную произв-сть. Увеличение числа рабочих полостей улучшает балансировку роторов. 1 з.п, ф-лы, 1А ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторная машина Вовка В.П. | 1984 |
|
SU1288350A1 |
| СПОСОБ РАБОТЫ РОТОРНОГО ДВИГАТЕЛЯ И РОТОРНЫЙ ДВИГАТЕЛЬ ХОЛОДНОГО | 2009 |
|
RU2464432C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1990 |
|
RU2037631C1 |
| Роторная машина | 1990 |
|
SU1751407A1 |
| РОТОРНАЯ МАШИНА | 1993 |
|
RU2062885C1 |
| БЕСКЛАПАННЫЙ ОРБИТАЛЬНЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2285127C2 |
| Модульный роторный ДВС | 2024 |
|
RU2835533C1 |
| РОТОРНО-ПЛАСТИНЧАТАЯ МАШИНА С ОБЪЕМНЫМ РЕГУЛИРОВАНИЕМ (варианты) | 2017 |
|
RU2643886C1 |
| Роторная машина силовой установки с внешним подводом теплоты (варианты) | 2019 |
|
RU2731466C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ | 1989 |
|
RU2015372C1 |



Изобретение позволяет повысить надежность работы роторной машины. Соединение роторов 7,8 с кривошипами 13,14 выполнено при помощи зубчатого зацепления с передаточным отношением, равным числу лопастей ротора 7,8. Величина макс. эксцентриситета Eмакс между осями кривошипов 13,14 и кулисы 10 определяется зависимостью: Eмакс=R COS(Iφ/2), где R- радиус кривошипов, I - передаточное отношение между кривошипом и ротором, φ - угловой размер лопасти. Изменением эксцентриситета изменяются объемы рабочих полостей, что позволяет регулировать объемную произв-сть. Увеличение числа рабочих полостей улучшает балансировку роторов.1 з.п.ф-лы, 14 ил.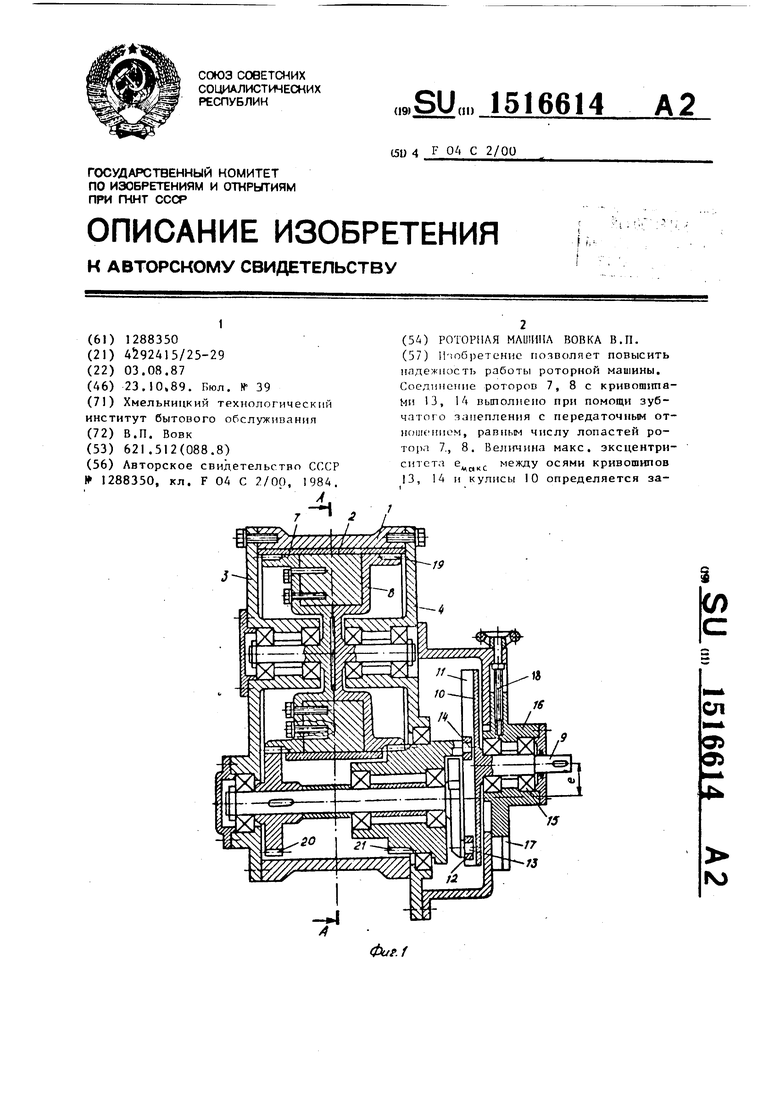
Изобретение относится к энергетическому машиностроению, может быть использовано в качестве компрессора, вакуум-насоса, детандера, двигателя и является усовершенствованием известной машины по авт. св. № 1288350
Цель изобретения - повьш1ение надежности работы роторной машины.
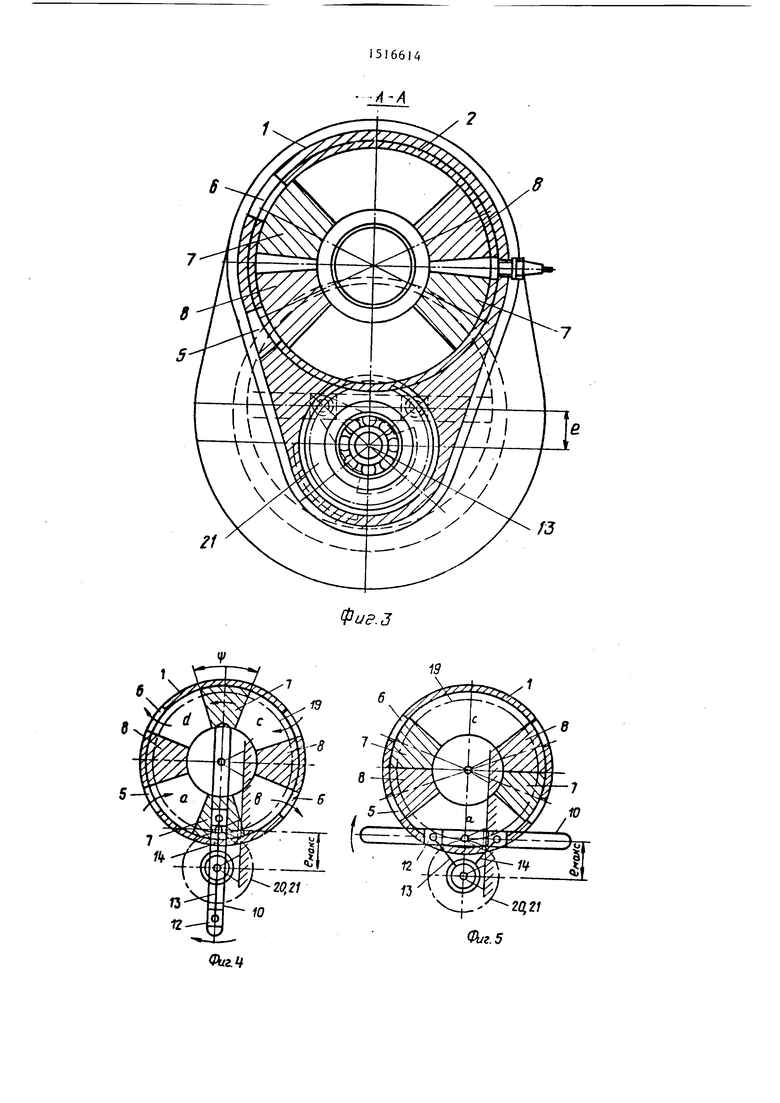
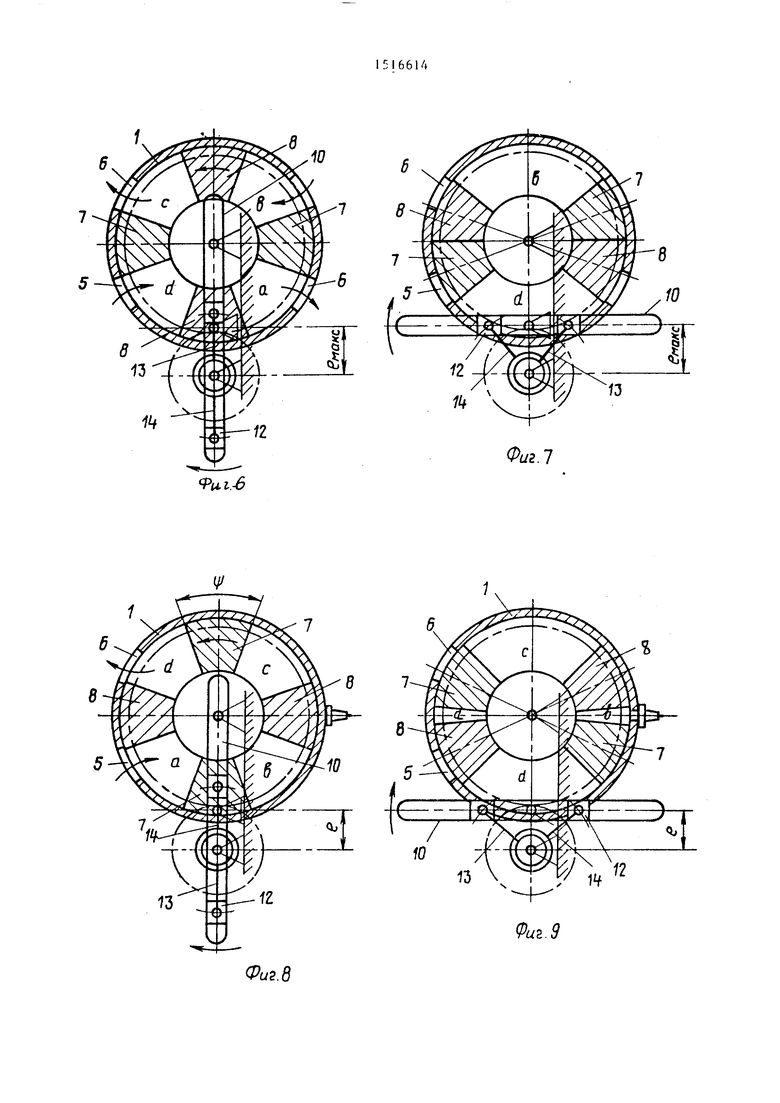
На фиг. 1 представлена роторная машина, продольный разрез; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 - то же, при повороте приводного рала с кулисой на угол /2 от начального положения; на фиг. А - кинематическая схема роторной машины, работающе в режиме компрессора, при максимальном эксцентриситете (.) между осями кривошипов и кулисы; на фиг,5 то же, при повороте приводного вала с кулисой на угол /2; на фиг. 6 - то же, при повороте приводного вала с кулисой на угол 1Г; на фиг. 7 - то же, при повороте приводного вала с кулисой на угол 3/2 |Г; на фиг. 8 - ки нематическая схема роторной машины, работающей в режиме четырехтактного двигателя внутреннего сгорания, при эксцентриситете между осями криво
шипов и кулисы, меньшем максимального
(); на фиг. 9 - то же, при повороте приводного вала на угол 1 /2; на фиг. 10 - то же, при повороте при-, водного вала на угол на фиг. 11 - то же, при повороте приводного вала на угол на фиг. 12 - кинематическая схема роторной машины при различных значениях эксцентриситета между осями кривошипов и кулисы и максимальном объеме одной пары рабочих полостей; на фиг. 13 - кинематическая схема роторной машины при различных значениях эксцентриситета между осями кривошипов и кулисы и минимальном объеме другой пары рабочих полостей; на фиг. 14 - то же, при отсутствии эксцентриситета между осями кривошипов и кулисы.
5
0
5
5
0
0
5
0
Роторная машина содержит корпус I с цилиндром 2, торцовые крышки 3 и 4, впускное 5 и выпускное 6 окна, кон- центрично установленные в цилиндре 2 корпуса 1 роторы 7 и 8 с двумя лопастями каждый, связанные между собой и с приводным валом 9 посредством кривошипно-кулисного механизма CHirx- ронизации движения роторов 7 и 8. Механизм синхронизации движения роторов 7 и 8 содержит кулису 10 с направляющим пазом 11, ползуны 12, кривошипы 13 и 14, Кулиса 10 жестко соединена с приводным валом 9 таким образом, что ось вала пересекается осью направляющего паза 11 в центральной точке паза, а оба ползуна 12 расположены в направляющем пазу 11 кулисы 10 и шарпирно закреплены на кривошипах 13 и 14, которые связаны с роторами 7 и 8 соответственно и установлены соосно друг другу и эксцентрично кулисе 10 с эксцентриситетом е. Приводной вал 9 с кулисой 10 установлен в подшипниках 15 на траверсе 16, которая находится в направляющих 17 на торцовой крьш1ке 4 корпуса 1 и связана с ней винтовой передачей 18. Кривошипы 13 и 14 связаны с роторами 7 и 8 посредством зубчатой передачи с пepeдaтoчIIы отношением, равным числу лопастей ротора . Роторы 7 и 8 снабжены зубчатыми венцами 19, которые находятся в зацеплении с шестернями 20 и 21 кривошютов 13 и 14 соответственно. Делительный диаметр и число зубьев шестерен 20 и 21 кривошипов 13 и 14 в два раза меньше делительного диаметра и числа зубчатых венцов 19 роторов 7 и 8, поэтому скорость и угол поворота каждого из кривошипов 13 и 14 в два раза больше скорости и угла поворота соответствующего ротора 7 и 8. При этом величина максимального эксцентриситета е,,. между осями кривошипов 13 и 14 и кулисы 10 определяется зависимостью
i V е R cos ( -т- ) I
маис 2 где R - радиус кривошшюв;
i - передаточное отношение между
кривошипом и ротором; V - угловой размер лопасти, Роторная машина работает следуюпи1м образом.
При вращении приводного вала 9 с кулисой 10 с постоянной скоростью за один оборот приводного вала 9 каждый из кривошипов 13 и 14 поворачивается
на один оборот в ту же сторону, плав-15 впускное окно 5, в полости b - tжaтиe
но изменяя свою скорость, а связанные с ним роторы 7 и 8 поворачиваются соответствешю на полоборота в противоположную сторону, плавно изменял свою скорость пропорционально скорости крипошшюв 13 и 14. При максимальном эксцентриситете между осями кривошипов 13 и 14 и кулисы 10 (фиг. 4-7) при повороте приводного пала 9 с кулисой 10 по часовой стрелке от начального положения (фиг. 4) на угол (/2 (фиг. 5), кри- I воишп 13 поворачивается в ту же сторону на угол () соответственно, связанный с кривошипом 13 через зубчатую передачу с передаточным отношением , ротор 7 поворачивается против часовой стрелки на угол (1Г- -у)/2. Одновременно кривошип 14 поворачивается на угол (1, а связанный с ним через зубчатуто передачу с передаточным отношением ротор 8 попо рачииается против часовой стрелки на угол у/2. При этом объемы рабочих полостей а и с увеличиваются до максимальной величины, и в них осуществляется впуск рабочего тела через впускное окно 5, а объемы рабочих полостей, b и d уменьшаются до нуля, и в них происходит сжат1 с и выпуск рабочего тела через выпускное окно 6, При дальнейше - повороте приводного вала 9 с кулисой 10 на угол f (фиг, 6) от начального положения ротор 7 поворачивается на угол V/2, а ротор 8 - на угол (1Г-у)/2, в полостях а и с начинается сжатие и выпуск рабочего тела через выпускное окно 6 а в полостях b и d - впуск рабочего тела через впускное окно 5, При пов6 роте приводного вала 9 с кулисой 10 на угол (фиг, 7) от начального положения ротор 7 поворачивается на угол (1/2, а ротор 8 - на угол (ff
166146
-If/)/2, при этом в рабочих полостях | а и с заканчивается сжатие и выпуск рабочего тела, а в рабочих полостях с b и d заканчивается впуск рабочего тела.
На фиг. 8-11 изображена кинематическая схема роторной машины, работающей п режиме четырехтактного двигателя 0 внутреннего сгорания при эксцентриситете между осями кривошипов 3 и 14 и кулисы 10, меньшем максимального (,c ). На фиг. 8 в полости а осуществляется впуск рабочего тела через
5
0
,
рабочего тела, в с - расширение газов, в полости d - iituiycK отработавших газов через окно 6, При повороте приводного вала 9 с кулисой 10 на угол F/2 (фч1 . 9) от начального положения (фиг. 8) в полостях а, d, с и d заканчивают ся гоотвстстиующие процессы, т.е.. ппуск, сжатие, расширение и выпуск. При дальнейшем повороте приводного вала 9 на угол IT (фиг, 10 от начального положения в полости а начинается сжатие рабочего тела, в полости b - расширение газов, в нолости с - пуск отработавших газов, в полости d - впуск рабочего тела. При повороте приводного вала 9 с кулисой 10 на угол 3|Г/2 (фиг. II) от иачального положения в полости а заканчивается сжатие рабочего тела и производится его зажигание, в полости b заканчивается расширепие газов после горения рабочего тела, в полости с закан- чикается выпуск отработа, газов, D полости d заканчивается впуск рабочего тела.
Вращение винтовой передачи 18 . обеспечивает перемещение траверсы 16 и направляющих 17 относительно крьЕпки 4 корпуса 1 и изменение эксцентриситета е между осямп кривошипов 13 и 14 и кулисы 10 от нуля (фиг. 14) через промежуточные зна- чеш1я (О ;е е „„КС ) до максимального значения (фиг, 1-7). Вследствие из- 0 менения эксцентриситета е (фиг. 12 и 13) изменяются объемы рабочих полостей от при до при (фиг, 4-7), что позволяет регулировать объемную производительность машины.
Изобретение позволяет увеличить число рабочих полостей роторной машины, и, таким образом, улучшить балансировку роторов.
5
0
5
Формула изобретения
I. Роторная машина по авт. св. IP 1288350, отличающаяся тем, что, с целью повьшения надежности, соединение роторов с кривошипами выполнено при помопщ зубчатого зацепления с передаточным отношением, рав- Hbw числу лопастей ротора.
.2. Машина по п. 1, отличаю щ а я с я тем, что величина максия
21
148
мального эксцентриситета е
м-ке между осями кривошипов и кулисы определяется зависимостью
I
ииакс
R сов(
2 2
где R - радиус кривошипов;
i - передаточное отношение между
кривошипом и ротором; V угловой размер лопасти.
/5
Фиа.2
//
Фие.З
8
/J
в
20,21
Фиг. 5
в
10
1h ::
ftii.-б
Фиг. 8
Фиг.7
Фиг. 9
Фиг.Ю
Фиг. 11
Фиг. 13
| Роторная машина Вовка В.П. | 1984 |
|
SU1288350A1 |
| F | |||
