ел
S
SJ
105
мощью пары параллельных тяг 10. При линейном перемещении объекта электрическое сопротивление обмотки 3 между ее концом и контактной пластиной одно- значно связано с этим перемещением. При перекосе объекта 9 соответственно поворачивается и дополнительное основание 8, что приводит к изменению количества контактирующих элементов плоского участка 4 резистивной обмотки 3. Изменение общего электрического сопротивления этой обмотки является мерой углового перекоса объекта контроля, которая может быть использована для внесения корректирующих поправок в результаты измерения. 2 ил.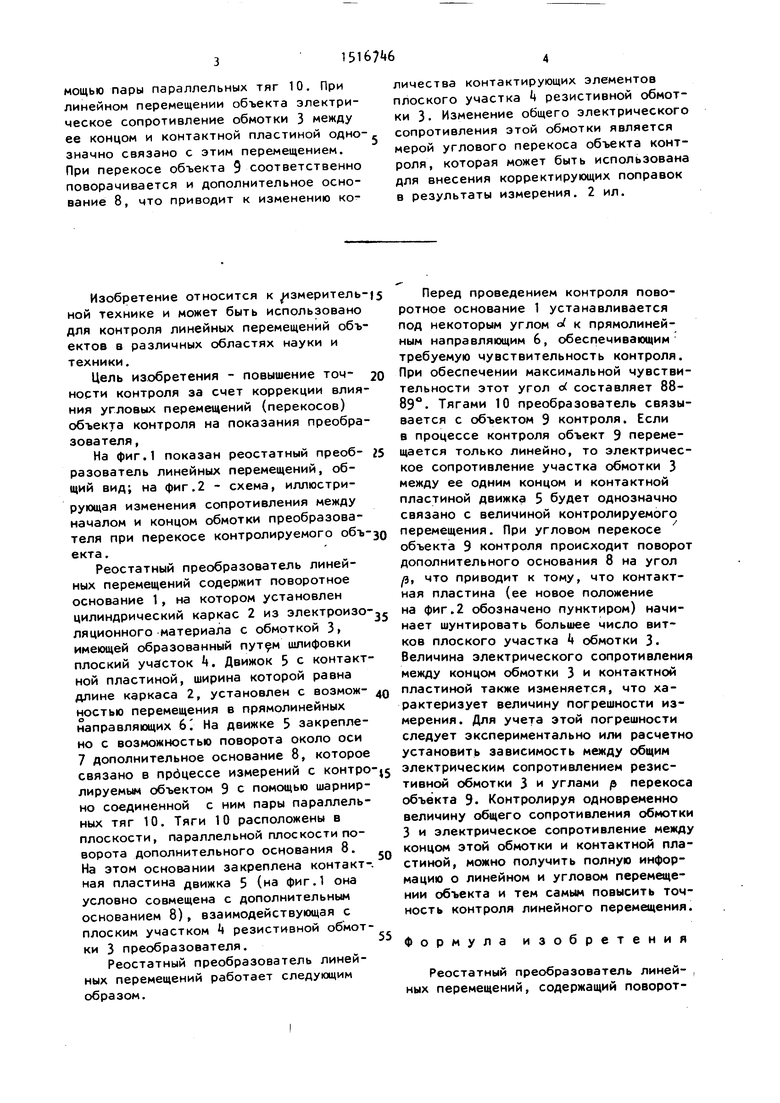
| название | год | авторы | номер документа |
|---|---|---|---|
| Реостатный преобразователь линейных перемещений | 1989 |
|
SU1753248A1 |
| Реостатный преобразователь линейных перемещений | 1982 |
|
SU1019219A1 |
| Резистивный преобразователь линейного перемещения | 1986 |
|
SU1359656A1 |
| Предметный столик электронного микроскопа | 1987 |
|
SU1636895A1 |
| Реостатный преобразователь линейных перемещений | 1990 |
|
SU1744433A1 |
| Потенциометр | 1981 |
|
SU1010666A1 |
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ВЫПОЛНЕНИЯ ГРАФОАНАЛИТИЧЕСКИХ ОПЕРАЦИЙ | 1997 |
|
RU2133449C1 |
| Потенциометрический преобразователь линейных перемещений | 1977 |
|
SU693105A1 |
| СПОСОБ ОЦЕНКИ КОЭФФИЦИЕНТА ПЕРЕДАЧИ ЦЕПИ ПОТЕНЦИОМЕТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2236668C2 |
| Функциональный преобразователь | 1974 |
|
SU594509A1 |
Изобретение относится к измерительной технике. Цель изобретения - повышение точности контроля реостатного преобразователя линейных перемещений за счет коррекции влияния перекосов объекта контроля. Реостатный преобразователь линейных перемещений содержит поворотное основание 1, на котором размещена обмотка 3, имеющая плоский участок 4, и контактная пластина, закрепленная на дополнительном основании 8, связанным с движком 5 и установленным с возможностью поворота около оси 7. Дополнительное основание 8 связано с объектом контроля с помощью пары параллельных тяг 10. При линейном перемещении объекта электрическое сопротивление обмотки 3 между ее концом и контактной пластиной однозначно связано с этим перемещением. При перекосе объекта 9 соответственно поворачивается и дополнительное основание 8, что приводит к изменению количества контактируемых элементов плоского участка 4 резистивной обмотки 3. Изменение общего электрического сопротивления этой обмотки является мерой углового перекоса объекта контроля, которая может быть использована для внесения корректирующих поправок в результаты измерения. 2 ил.
Изобретение относится к 1змepитeльной технике и может быть использовано для контроля линейных перемещений объектов в различных областях науки и техники.
Цель изобретения - повышение точ- норти контроля за счет коррекции влияния угловых перемещений (перекосов) объекта контроля на показания преобразователя ,
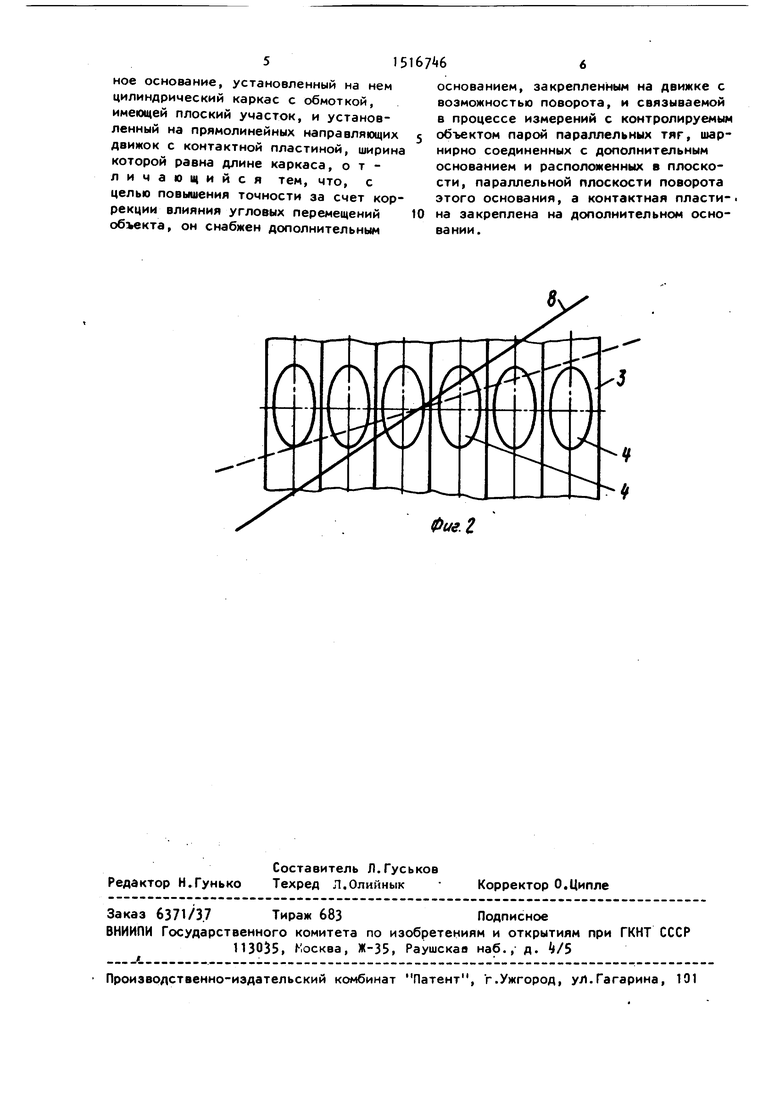
На фиг.1 показан реостатный преоб- разователь линейных перемещений, общий вид; на фиг.2 - схема, иллюстрирующая изменения сопротивления между началом и концом обмотки преобразователя при перекосе контролируемого объакта.
Реостатный преобразователь линейных перемещений содержит поворотное основание 1, на котором установлен цилиндрический каркас 2 из злектроизоляционного материала с обмоткой 3 имеющей образованный шлифовки плоский участок . Движок 5 с контактной пластиной, ширина которой равна длине каркаса 2, установлен с возмож- ностью перемещения в прямолинейных направляющих 6, На движке 5 закреплено с возможностью поворота около оси 7 дополнительное основание 8, которое связано в прдцессе измерений с контро лируемым объектом 9 с помощью шарнир- но соединенной с ним пары параллельных тяг 10. Тяги 10 расположены в плоскости, параллельной плоскости поворота дополнительного основания 8. На этом основании закреплена контакт-, ная пластина движка 5 (на фиг.1 она условно совмещена с дополнительным основанием 8), взаимодействующая с плоским участком резистивной обмот- ки 3 преобразователя.
Реостатный преобразователь линейных перемещений работает следующим образом.
Перед проведением контроля поворотное основание 1 устанавливается под некоторым углом of к прямолинейным направляющим 6, обеспечивающим требуемую чувствительность контроля. При обеспечении максимальной чувствительности этот угол о( составляет 88- 89°. Тягами 10 преобразователь связывается с объектом 9 контроля. Если в процессе контроля объект 9 перемещается только линейно, то электрическое сопротивление участка обмотки 3 между ее одним концом и контактной пластиной движка 5 будет однозначно связано с величиной контролируемого перемещения. При угловом перекосе объекта 9 контроля происходит поворот дополнительного основания 8 на угол (i, что приводит к тому, что контактная пластина (ее новое положение на фиг.2 обозначено пунктиром) начинает шунтировать большее число витков плоского участка 4 обмотки 3. Величина электрического сопротивления между концом обмотки 3 и контактной пластиной также изменяется, что характеризует величину погрешности измерения. Для учета этой погрешности следует экспериментально или расчетно установить зависимость между общим электрическим сопротивлением резистивной обмотки 3 и углами /j перекоса объекта 9. Контролируя одновременно величину общего сопротивления обмотки 3 и электрическое сопротивление между концом этой обмотки и контактной пластиной, можно получить полную информацию о линейном и угловом перемещении объекта и тем самым повысить точность контроля линейного перемещения.
Формула изобретения
Реостатный преобразователь линей- , ных перемещений, содержащий поворот51
ное основание, установленный на нем цилиндрический каркас с обмоткой, имеющей плоский участок, и установленный на прямолинейных направляющих движок с контактной пластиной, ширина которой равна длине каркаса, отличающийся тем, что, с целью повышения точности за счет коррекции влияния угловых перемещений о6:ьекта, он снабжен дополнительным
основанием, закрепленным на движке с возможностью поворота, и связываемой в процессе измерений с контролируемым объектом парой параллельных тяг, шар- нирно соединенных с дополнительным основанием и расположенных в плоскости, параллельной плоскости поворота этого основания, а контактная пластина закреплена на дополнительном основании.
0US.Z
