СП
Од
СП
а
/7
Изобретение относится к измерительной технике и предназначено для контроля расстояния до металлической поверхности, например, при измерениях линейных размеров в машиностроении деталей двигателей турбин,, топливных емкостей и т.д. по изменению расстояния до их поверхности.
Целью изобретения является повышение точности при контроле криволинейных поверхностей различного радиуса благодаря локализации магнитного поля в области магнитопровода датчика и компенсации влияния кривизны поверхности объекта с помбщью корректирующей секционированной вторичной обмотки датчика.
На чертеже схематично представлена конструкция индукционного датчика расстояния до металлической поверх- ности.
Индукционный датчик расстояния до металлической поверхности содержит Ш-образный магнитопровод 1, на среднем стержне которого размещена первичная обмотка 2 возбуждения. Имеются также две вторичные обмотки - секционирования, которая размещена на всех трех стержнях магнитопровода ближе к их концам, и дополнительная, размещенная на среднем стержне и вы- полняю1цая функции измерительной обмотки 3. Секции и 5 многосекционной вторичной обмотки 6 включены последовательно-согласно между собой и последовательно-встречно с дополнительной секцией 7 этой обмотки, размещенной на среднем стержне магнитопровода. Эта секция 7 обмотки 6 выполнена с возможностью регули- срования числа ее витков. Секционированная вторичная обмотка 6 выполняет функции корректирующей обмотки и включена последовательно с первичной обмоткой трансформатора 8. Измерительная обмотка 3 датчика включена последовательно с вторичной обмоткой трансформатора. 8 и подключена к входу схемы 9 сравнения, выполненной в виде нуль-органа, к второму входу которой присоединен источник 10 опорного калиброванного сигнала, включенного в цепь обмотки 2 возбуждения и подключенного вместе с нею к источнику 11 питания переменного тока. В трансформаторе 8 датчика предусмотрена возможность изменения коэффициента трансформации при помощи допол
,
10
15
20
25
167564
нительных отводов от его обмоток, подбираемых в процессе настройки датчика .
Индукционный датчик расстояния до металлической поверхности работает следующим образом.
Перед началом работы производится юстировка датчика. Для этого датчик располагают у плоской металлической поверхности и изменением числа витков дополнительной секции 7 обмотки 6 обеспечивают нулевое напряжение на входе трансформатора 8. Затем устанавливают определенную величину опорного сигнала от источника 10, соответствующую заданному расстоянию до контролируемой металлической поверхности. При прохождении тока от источника 11 питания датчика через обмотку 2 возбуждения возникает переменный магнитный поток, проходящий через средний стержень и разветвляющийся через боковые стержни магнитопровода 1. При этом магнитный поток проникает также в поверхностную область контролируемой, например, цилиндрической детали, которая изменяет его вследствие влияния вихревых токов, индуктированных в ней этим потоком, или (и) повышения магнитной проводимости (если деталь ферромагнитная). Поэтому выходной сиг нал (ЭДС) на выводах измерительной обмотки 3 наводимый магнитным потоком в среднем стержне, зависит от материала контролируемой детали и зазора между нею и торцами стержней магнитопровода 1 датчика.
Сигнал измерительной обмотки 3 зависит не только от зазора до поверхности объекта по оси симметрии датчика, т.е. под средним стержнем магнитопровода 1, но и от радиуса кривизны этой поверхности, т.е. из- за возможного неравенства расстояний от боковых стержней магнитопровода датчика до этой поверхности данному зазору по оси симметрии. Компенсация изменения сигнала, обусловленная указанной кривизной, осуществляется корректирующей обмоткой и трансформатором 8. При контроле цилиндрической поверхности на выходе корректирующей обмотки 6 появляется напряжение, кот торое с требуемым коэффициентом пре- образования, обеспечиваемым трансформатором 8, добавляется к напряжению измерительной обмотки 3. В реЮ
35
40
45
50
55
зультате этого на вхоле схемы 9 сравнения получается такое же результирующее значение выходного сигнала, как и при контроле плоской поверхности объекта (при таком же, выбранном заранее, зазоре до нее от среднего стержня магнитопровода). В ту же схему 9 сравнения от источника - 10 калиброванного сигнала, включенного в цепь тока обмотки 2 возбужде
67566
(например, поясков на поверхности вращения, канавок деталей двигателей и турбин и т.п.), а существенная компенсация влияния кривизны контролируемой поверхности трансформированным сигналом секционированной обмотки обеспечивает повышенную точность контроля расстояния до металлической поверхности с различным радиусом кривизны.
10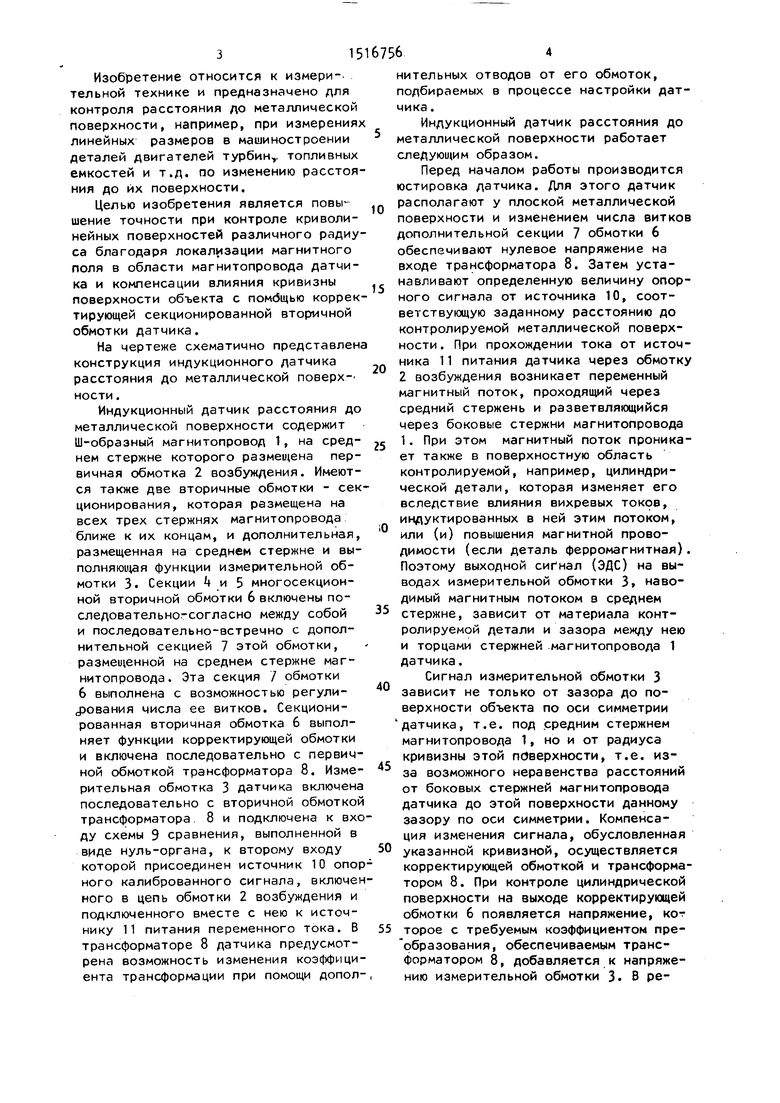

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОДУГОВОЙ СВАРКИ (ВАРИАНТЫ) И СПОСОБ ИЗГОТОВЛЕНИЯ ЕГО МАГНИТОПРОВОДА | 2001 |
|
RU2198078C1 |
| Электротрансформатор для работы в резонансном режиме, а также в составе статора электрогенератора | 2021 |
|
RU2770049C1 |
| Датчик параметров движения | 1990 |
|
SU1781621A1 |
| Индукционный датчик | 1981 |
|
SU1007052A1 |
| Датчик линейных перемещений | 1979 |
|
SU838311A1 |
| СПОСОБ МАГНИТОИНДУКЦИОННОГО ИЗМЕРЕНИЯ ТОЛЩИНЫ ДИЭЛЕКТРИЧЕСКОГО ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2616071C1 |
| Ультразвуковая технологическая установка | 1981 |
|
SU1049120A1 |
| Электромагнитный расходомер | 1990 |
|
SU1768986A1 |
| Трансформатор тока для измерения тока величиной свыше 25000а | 1972 |
|
SU549842A1 |
| УСТРОЙСТВО ДЛЯ ОБЛУЧЕНИЯ И СПОСОБ КОРРЕКТИРОВКИ ПОЛОЖЕНИЯ ПУЧКА | 2003 |
|
RU2257690C2 |
Изобретение относится к измерительной технике. Цель изобретения - повышение точности индукционного датчика расстояния до металлической поверхности, которая может быть как плоской, так и криволинейной с различным радиусом кривизны. Датчик содержит обмотку 2 возбуждения и две вторичные обмотки, одна из которых является секционированной обмоткой и выполняет функции корректирующей обмотки 6, а другая - измерительной обмоткой 3. Эта обмотка включена последовательно с вторичной обмоткой трансформатора 8, первичная обмотка которого включена последовательно с корректирующей обмоткой 6. На выходе датчика формируется результирующий сигнал с учетом кривизны и типа материала поверхности контролируемого объекта. 1 ил.
ния, поступает опорный сигнал, соответствующий пороговому значению сигнала вторичной измерительной обмотки 3I при достижении которого схема 3,выполненная как нуль-орган (пороговый измеритель, срабатывающий при нулевой разности измеренного и опорного входного сигналов), выдает от- счетный результирующий сигнал.
В датчике предусматривается возможность корректировки коэффициен- - та трансформации напряжения в трансФормула изобретения Индукционный датчик расстояния до
15 металлической поверхности, содержа- Ш-образный магнитопровод, первичную обмотку возбуждения, размещенную на его среднем стержне, и вторичную обмотку, две секции которой размещены
20 на крайних стержнях магнитопровода,, отличающийся тем, что, с целью повышения точности при контро- 1ле криволинейных поверхностей различного радиуса, он снабжен дополнительфррматоре 8 при помощи дополнительных
отводов от его обмоток, что необхо- 25ной секцией вторичной обмотки, раздимо при контроле деталей с различны-мещенной на среднем стержне магнитоми электромагнитными свойствами, а(Провода и включенной встречно с перт
также при изменении установочныхвыми двумя, которые соединены согласзначений начального зазора. Благода-IHO последовательно, согласующим
ря Ш-образной конструкции магнитопро- зотрансформатором, первичная обмотка
водов происходит локализация зоны контроля, вследствие чего существенно уменьшаются магнитные потоки рассеяния, что позволяет с повышенной чувствительностью контролировать расстояние до криволинейных поверхностей различного радиуса и конфигурации
« 55
которого включена последовательно секциями вторичной обмотки, и дола - нительной обмоткой, размещенной на среднем стержне магнитопровода и включенной последовательно сргласно с вторичной обмоткой трансформато- ра, .
Формула изобретения Индукционный датчик расстояния до
металлической поверхности, содержа- Ш-образный магнитопровод, первичную обмотку возбуждения, размещенную на его среднем стержне, и вторичную обмотку, две секции которой размещены
на крайних стержнях магнитопровода,, отличающийся тем, что, с целью повышения точности при контро- ле криволинейных поверхностей различного радиуса, он снабжен дополнитель
55
которого включена последовательно секциями вторичной обмотки, и дола - нительной обмоткой, размещенной на среднем стержне магнитопровода и включенной последовательно сргласно с вторичной обмоткой трансформато- ра, .
| Агейкин Л.И | |||
| Датчики контроля и регулирования | |||
| - М.: Машиностроение, 19б5, с | |||
| Способ получения нерастворимых лаков основных красителей в субстанции и на волокнах | 1923 |
|
SU132A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
