(Л
ел
О)
«
Изобретение относится к измерительной технике и может быть использовано, в частности, для дистанционного измерения геометрических параметров и контроля положения объекта в труднодоступных зонах, при испытаниях и эксплуатации деталей и узлов машин и механизмов, а также для дистанционного контроля объектов, находящихся в агрессивных средах.
Цель изобретения - повышение точности измерения путем исключения неоднозначности наводки на плоскость объекта.
На чертеже изображена принципиальная схема устройства, реализующего способ.
Устройство содержит канал подсветки, включающий последовательно распо- ложеиные источник 1 света, модулятор 2 оптического излучения, жгут 3 оптических волокон для передачи потока подсветки, информационный канал, включающий светоделительный элемент 4, оп тически сопряженный с окуляром 5 if фотоприемником 6,.информационный жгут 7 оптических волокон, измерительную сетку 8, объектив 9, датчик 10 положения объектива, дйтчик 11 положе ния объекта и вычислительный блок 12, элементы 1,2,3,5,7,9 и 12 образуют собственно измерительный эндоскоп. Способ осуществляется следуюпщм образом.
Амплитудно -модулированное излучение подсветки, сформированное источником 1 света И модулятором 2 посредством волоконного жгута 3, направляется на объект 13.
Часть светового потока воспринимается объективом 9, который строит изо бражение объекта 13 на дистальном тор
Q
Q 5 л
, 5
це волоконного жгута 7. В области проксимального торца светоделительный элемент 4 расщепляет излучение на два потока, один из которых через окуляр 5 воспринимается оператором, оценивающим размеры объекта 13 по числу делений измерительной сетки 8.
Другой поток направляется на фотоприемник 6, электрический сигнал с выхода которчэго детектируется датчиком 11 и поступает на вход вычислительного блока 12. Величина данного сигнала связана с величиной потока, воспринимаемого объективом 9, а следовательно, зависит от расстояния D между объективом 9 и объектом 13.
Датчик 10 формирует на выходе электрический сигнал, пропорциональный Q - расстоянию между плоскостью изо- бражения и объективом 9 эндоскопа. Этот сигнал поступает на вход вычислительного блока 12, который производит расчет масштаба М изображения по формуле М D/Q и производит расчет истинного размера объекта 13.
Формула изобретения
Способ диста|1ционного измерения линейных размеров объекта, заключающийся в том, что располагают измерительный эндоскоп над контролируемыз ; объектом, определяют расстояние D от объектива эндоскопа до объекта, производят расчет масштабного коэффициента М и измеряют линейный размер объекта, о тличающийся тем, что, с целью повьш1ения точности измерения, определяют расстояние Q между плоскостью изображения и объективом эндоскопа, а расчет масштабного коэффициента М производят по формуле М D/Q .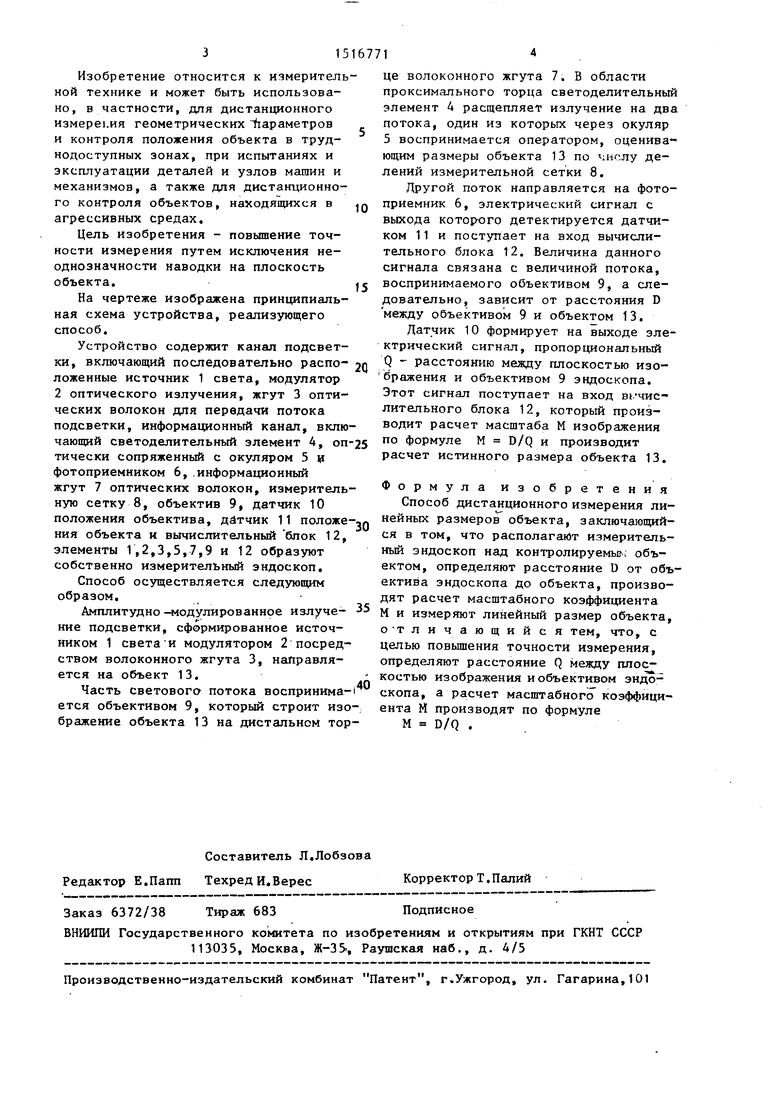
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительный эндоскоп | 1984 |
|
SU1296987A1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2009 |
|
RU2413205C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2009 |
|
RU2405137C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ЭНДОСКОПА | 2007 |
|
RU2337606C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2009 |
|
RU2405136C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2008 |
|
RU2377544C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2003 |
|
RU2239179C1 |
| Эндоскоп | 1979 |
|
SU859987A1 |
| Способ фокусировки телескопического объектива и устройство для его осуществления | 1990 |
|
SU1760423A1 |
| ГРАДИЕНТНАЯ ОПТИЧЕСКАЯ СИСТЕМА СВЕРХТОНКОГО ЭНДОСКОПА | 2001 |
|
RU2192029C1 |
Изобретение относится к измерительной технике и может быть использовано, в частности, для дистанционного измерения геометрических параметров и контроля положения объекта в труднодоступных зонах. Цель изобретения - повышение точности измерения путем исключения неоднозначности наводки на плоскость объекта. Располагают измерительный эндоскоп над контролируемым объектом 13, определяют расстояние D от объектива 9 эндоскопа до объекта 13, производят расчет масштабного коэффициента М по формуле М=D/Q, где Q - расстояние между плоскостью изображения и объективом 9 эндоскопа. Затем измеряют линейный размер объекта 13. 1 ил.
| Бычков О.Д | |||
| Контроль внутренних поверхностей.-- М., 1975, с | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
