ределяется с помощью блока 6 моделирования механических потерь. На выходе блока 5 умножения образуется сигнал, пропорциональный моменту вращения колонны с долотом. В суг мато- ре 8 происходит вычитание из этого момента величины момента холостого хода MK, вычисляемого в блоке 6 моделирования механических потерь по величинам момента вращения колонны с долотом и глубины бурения, которая определяется с помощью датчика 9.При
этом момент холостого хода рычисля- ется согласно выражению
5 хГ хх.
m(rri+i)
mt ( ) ;
где Мхк момент холостого после т-го опускания инструмента в начале бурения; хх( i конце (m-t-l)-ro интерва- ла бурения; Lml„.,)-конечное приращение глубины скважины за (т+1)-й интервал бурения; ul(a- теку1цее приращение глубины скважины. 1 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления процессом бурения | 1980 |
|
SU898048A1 |
| Устройство для моделирования автоматизированной буровой установки | 1989 |
|
SU1666684A1 |
| Устройство регулирования оптимальной осевой нагрузки на долото | 1981 |
|
SU972065A1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ЗАБОЙНОГО ГИДРАВЛИЧЕСКОГО ДВИГАТЕЛЯ ПРИ БУРЕНИИ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2029859C1 |
| Устройство для определения верхней границы прихвата колонны труб | 1985 |
|
SU1283369A1 |
| Устройство для определения отработки долота | 1980 |
|
SU876971A1 |
| Устройство для моделирования автоматизированной буровой установки | 1975 |
|
SU615499A1 |
| Устройство для контроля и управления процессом турбинного бурения | 1987 |
|
SU1461881A1 |
| АКТИВНЫЙ РЕГУЛЯТОР ПОДАЧИ ДОЛОТА | 2018 |
|
RU2681160C1 |
| Устройство для измерения глубиныСКВАжиНы | 1979 |
|
SU832080A1 |
Изобретение относится к силоизмерительной технике, а именно к устройствам измерения крутящего момента на роторе буровой установки с асинхронным электропроводом. Цель изобретения - повышение точности. В процессе бурения глубоких скважин долото периодически меняется. После M -й смены долота и опускания инструмента в скважину на ротор установки действует момент холостого хода Мхх, который определяется с помощью блока 6 моделирования механических потерь. На выходе блока 5 умножения образуется сигнал, пропорциональный моменту вращения колонны с долотом. В сумматоре 8 происходит вычитание из этого момента величины момента холостого хода Мхх, вычисляемого в блоке 6 моделирования механических потерь по величинам момента вращения колонны с долотом и глубины бурения, которая определяется с помощью датчика 9. При этом момент холостого хода вычисляется согласно выражению Mхх=MххM+(MххM-Mхх(M+1))/ΔLM(M+1) ΔL(M+1), где МххM-момент холостого после M-го опускания инструмента в начале бурения
Мхх(M+1) - то же, в конце (M+1) интервала бурения
98ДLM(M+1)- конечное приращение глубины скважины за (M+1) интервал бурения
ΔL(M+1)- текущее приращение глубины скважины. 1 ил.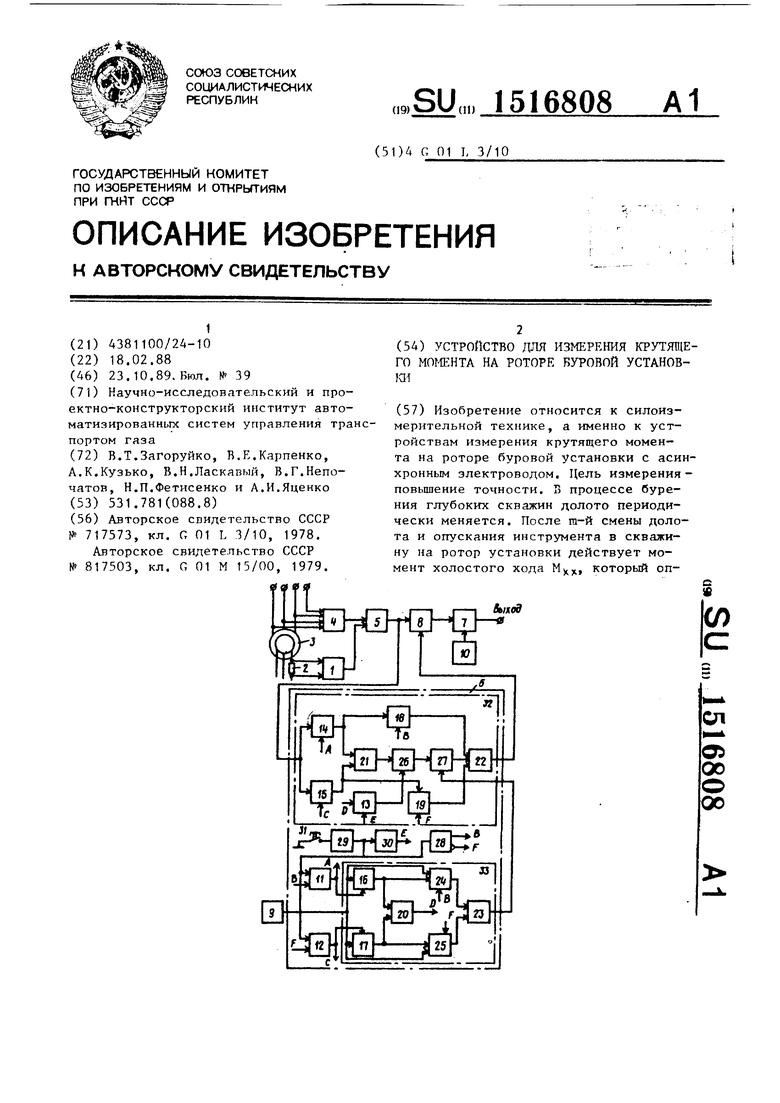
Изобретение относится к силоизме- рительной технике, а именно к устройствам измерения крутящего момента на роторе буровой- установки с асинхронным электроприводом.
Цель изо.бретения - повьпиение точности.
На чертеже представлена функцио- нальная схема устройства для измерения крутящего момента на роторе буровой установки.
Устройство содержит преобразователь 1 тока ротора, подсоединенный к датчику 2 тока ротора приводного асинхронного электродвигателя 3, преобразователь 4 разности прямой и обратной симметричных составляющих fta- п1 яжения питающей сети, блок 5 умно- жения, подключенный входами к выходам преобразователей 1 и 4. Выход блока 5 умножения подключен к первому входу блока 6 моделирования механических потерь, выход которого такж как и выход блока 5 умножения подключен к второму блоку 7 умножения через сумматор 8. К второму входу блка 6 моделирования механических потерь подключен датчик 9 глубины буре кия. Второй вход второго блока 7 умножения соединен с датчиком 10 передаточного отношения коробки передачи установки.
Блок 6 моделирования механичес
ких потерь содержит два элемента И 11 и 12, пять запоминающих элементов 13-17., два ключа 18 и 19, шесть сумматоров 20-25, блок 26 деления, блок 27 умножения,триггер 28, два формирователя 29 и 30 импульсов и кнопку 31, подключенную через формирователь 29 импульсов к входу триггера 28, первым входам элементов
0
5
о г Q
0
5
И 11 и 12 и входу формирователя 30 импульсов, выход которого подключен к управляющему входу запоминающего элемента 13, информационный вход которого подключен к выходу сумматора 20, а выход - к одному входу блока 26 деления, второй вход которого подключен к входу сумматора 21, входы которого подключены к выходам запоминающих элементов 14 и 15 соответственно и, соответственно через ключи 18 и 19 подсоединены соответственно к первому и второму входам сумматора 22, третий вход которого подключен к выходу блока 27 умножения, один вход которого подключен к выходу блока 26 деления, а второй - к выходу сумматора 23, выходы которого подключены соответственно к выходам запоминающих элементов 16 и 17 и входам сумматора 20, а вторые входы сумматоров 24 и 25 соединены между собой и подключены к информационным входам запоминающих элементов 16 и 17, управляющие входы которых подключены к управляющим входам соответственно запоминающих элементов 14 и 15 и выходам элементов И 11 и 12 соответственно, вторые входы которых подключены соответственно к первому и второму выходам триггера 28, к управляющим входам сумматоров 24 и 25 и ключей 18 и 19 соответственно.
При этом выход сумматора 22 блока 6 моделирования механических потерь является его выходом, информационные входы запоминающих элементов 14 и 15 являются первым входом блока 6 моделирования механических потерь, а информационные входы запоминающих элементов 16 и 17 являются вторым входом блока 6 моделирования механических потерь.
Запоминающие элементы 13-15, ключи 18 и 19, сумматоры 21 и 22, блок 2 деления и блок 27 умножения образуют узел 32 расчета момента холостого хо ла.
Элементы И 11 и 12, запоминаю1гр1е элементы 16 и 17 и сумматоры 20,23, 24 и Z5 образуют узел 33 расчета текущего приращения глубины скважины.
Устройство работает следующим образом.
Мощность, затрачивая на вращение бурильной колонны, можно выразить следую1чим образом:
Ьр
р. + р
где Р - мощность, расходуемая на трение колонны со стенками скважины и с буровым раствором;
мощность, затрачиваемая на работу долота.
Следовательно, баланс моментов вращения имеет вид
РП
Мвр М, -- М,
Mgp- М Мвр- Мух
м
И| представляет собой момент вращения до контакта долота с забоем (Мя 0), т.е. на холостом ходу долота, ив дальнейшем принят равным моменту холостого хода (М,,).
В процессе бурения глубоких скважин долото периодически меняется.После га-й смены долота и опускания инструмента в скважину момент хрлостого хода обозначен начала бурения (га-|-1)-го интервала скважина углубляется, увеличиваются длина колонны труб в скважине и момент холостого хода, который в конце работы долота в этом интервале становится равным xx(mti) Значение текущего момента Ицх можно выразить следующим образом:
iLuZ- ILUHi J
MXX Муу+
m
UL
Tfi( in+l)
Д1
(mn)
t
где &L/n,i - конечное приращение глубины скважины за (т+1)-й интервалJ U 1(,1 - текущее приращение глубины скважины.
На выходе блока 5 умножения образуется сигнал, пропорциональный моменту вращения колонны с долотом, «
26-
е
аеб
В сумматоре 8 происходит вычитание из этого момента величины момента холостого хода, вычисляемого блоком в моделирование механических потерь.Вы- ходной сигнал в блоке 7 умножается на постоянньш коэффициент Т, опреде- ляем1,1Й передаточным отношением коробки передач, кинематически расположенQ ной между валом двигателя и ротором буровой установки.
Перед началом очередного (т+1)-го интервала бурения бурильщик осуществляет прокручивание колонны с при1 поднятым долотом в течение нескольких секунд, пока не установится режим холостого хода (т.е. вращение колонны без Нагрузки на долото).На информационные входы запоминающих элеменЮ тов 14 и 15 с блока 5 поступает сигнал момента холостого хода в начале (т+1)-го интервала Mm. На выходе элемента 11 11 и 12 и формирователей 29 и 30 дежурит логический ноль.Триг- 5 гер 28 находится в состоянии логической единицы на прямом выходе.Бурильщик нажимает и отпускает кнопку 31. По опусканию кнопки 31 на ко- ротное время появляется импульс лоiO гической единицы на выходе формирователя 29, по спаду этого импульса возникает такой же импульс на выходе формирователя 30. Положительный фронт импульса с формирователя 29 перебрасывает триггер 28. На его прямом выходе устанавливается логический ноль, а на инверсном - логическая единица. На управляющие входы запоминающих элементов 15 и 17 поступают с выхода элемента И 12 запускающие сигналы, и глубина скважины L, записывается и запоминается в элементе 17. В запоминающем элементе 16 хранится записанное в предыдущем интервале значе- де ние L/ ,, На выходе сумматора 20 образуется сигнал разности L - L(,j uLrn(pi., который подается на запоминающий элемент 13. После сраба- тьгоания по спаду импульса на выходе 50 формирователя 30 этот сигнал запоминается в элементе 13.
Ключ 19 и сумматор 25 открыты в течение (т+1)-го интервала. Запускающим сигналом с элемента И 12 записывается значение момента холостого хода в элемент 15, В запоминающем элементе 14 хранится записанное в предыдущем интервале значение
35
40
55
М
VX(т-О
Значение II
xxlnl P з открытын ключ 19 поступает на третий вход сумматора 22. На первый вход его сигнал не поступает, так как ключ 18 закрыт. Сигналы Иуу;,., по- даются на входы сумматора 21. Сигна абсолютной разности с его выхода подается на численньпЧ вход блока 26 делителя на знаменательном входе которого существует сигнал uL и.На вы ходе блока 26 деления образуется сигнал отношения Лп(. (т-0 , который пддается на блок 27 умножения.На второй вход блока 27 умножения подаеся сигнал, пропорциональньш текуще- му приращению глубины скважины дР с выхода сумматора 23. На один вход этого сумматора поступает сигнал Д1гп4., Im-n - открытого сумматора 25. На второй вход сумматора 23 сигнал с суматора 24 не поступает, так как он по управлению закрыт в (т+О-м интервале сигналом триггера 28. Таким образом, на выходе сумматора 23 образуется сигнал,пропор- циональный TeKyiueNry приращению глубины скважины Л1 в данном интервале, поступающий на входы этого сумматора с одного из одинаковых вычитающих сумматоров 24 или 25, откры- тых поочередно в четные и нечетные интервалы бурения. Управляются эти сумматоры сигналом триггера 28. На входы открытого из этих сумматоров подаются сигналы общей текущей глубины скважины от датчика 9 глубины скважины 1 и конечной глубины Ь„, в предыдутцем интервале. На входе закрытого сумматора соответственно сигналы конечной глубины скважины в предпоследнем интервале . Сигналы конечных глубин в последнем и предпоследнем интервалах хранятся поочередно в запоминающих элементах 16 и 17, записываемых по управляющим сигналам элементов И 11 и 12.
На один вход блока 27 умножения подается с выхода блока 26 деления сигнал приращения момента холостого хода на единицу глубины скважины
A jtIicj. i
L гл (п-,)
а на второй вход - текущее приращени глубины скважины U п,,.
На выходе блока 27 умножения образуется сигнал
ЬМтГт-,) ,
ЛТ 7 M( ubm(rn-i)
g Q с
5
5
пропорциональный прогнозируемому абсолютному приращению момента холостого хода и теку1г;ем (т+1)-м интервале. Этот сигнал поступает на один из входов сумматора 22. На одном из остальных входов его имеется сигнал момента холостого хода вращения всей колонны в начале данного интервала. На выходе сумматора 22 образуется гтрогнозируемый сигнал момента холостого хода вращения колонны в данный момент. Этот сигнал поступает на один из входов сумматора 8, где вычитается из общего сигнала момента. На выходе блока 7 умножения образуется сигнал, пропорциональный моменту на долоте.
В начале каждого интервала, когда бурильщик отпускает кнопку 31, на входах сумматора 8 имеются два одинаковых (с точностью до погрешности блока 6) сигнала. Сигнал на выходе блока 7 уменьшается и в этот момент близок к нулю. После этого бурильщик создает нагрузку на долото, скважина углубляется, и на вькоде блока 7 умножения появляется сигнал,пропорциональный моменту на долоте.
Формула изобретения
Устройство для измерения крутящего момента на роторе буровой установки, содержащее датчик тока ротора приводного асинхронного электродвигателя и преобразователь разности прямой и симметричных составляющих напряжения питающей сети, подключенные к входам первого блока умножения, выход которого подключен к первому входу сумматора, к второму входу которого подключен выход блока моделирования механических Потерь, отличающееся тем, что, с целью повышение точности, в него введены второй блок умножения, датчик глубины бурения и датчик передаточного отношения коробки передач установки, подключенный к одному входу второго блока умножения, другой вход которого подключен к выходу сумматора, а блок моделирования механических потерь содержит два элемента И, четыре запоминающих элемента, два ключа, шесть сумматоров, блок деления,блок умножения, триггер, два формирователя импульсов и кнопку, подключенную через первый формирователь импульсов к входу триггера, первым входам эле91
ментов И и к входу второго формирователя импульсов, вьгход которого подключен к управляюи1ему входу первого запоминающего элемента, информа1щон- ный вход которого подключен к выходу первого сумматора, а выход - к одном входу блока деления, второй вход которого подключен к выходу второго сумматора, входы которого подключены к выходам второго и третьего запоминающих элементов соответственно и через первый и второй ключи подсоединены соответственно к первому и второьгу входам третьего сумматора, третий вход которого подключен к выходу блока умножения, один вход которого подключен к выходу блока деления, а второй - к выходу четвертого сумматора, входы которого подключены соответственно к выходам пятого и шестого сумматоров, лервые входы которых подключены соответственно к выходам четвертого и пятого запоминающих элементов и входам первого
810
сумматора, а вторые входы пятого и шестого сумматоров соединены между собой и подключены к информационным входам четвертого и пятого запоминающих элементов, управляющие входы которых подключены соответственно к управляющим входам второго и третьего запоминающих элементов и к
выходам соответственно первого и второго элементов И, вторые входы которых подключены соответственно к первому и второму выходам триггера, к управляющим входам пятого и шестого сумматоров и первого и второго
ключей соответственно, при этом выход третьего сумматора блока моделирования, механических потерь подключен к второму входу сумматора, к первому
входу которого подключены входы второго и третьего запоминающих элементов блока моделирования механических потерь, к первым входам четвертого и пятого запоминающих элементов кото-
рого подключен датчик глубины бурения.
| Устройство для измерения крутящего момента на роторе буровой установки | 1978 |
|
SU717573A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стенд для испытания двигателяВНуТРЕННЕгО СгОРАНия | 1979 |
|
SU817503A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
