Изобретение относится к неразру- шшощему контролю и может быть нс- ггальзопано для определения иестопо- ложепия де.фкктоп во вращающихся объектах по снгналам акустимеской (Л, ), в частности для днаг- ностики дефектов деталей ротороп.
Целью изоб1)цтения является рас- niipeinie тг хнологических возможносте за счет определения местоположении
дефектов 1Ю вращающихся объектах. II
На чертеже представлено УСТРОЙСТВО для реализации спЬсоба определения коопди 1ач источников сигналов ЛЭ,
Устройство содержит двухопорный консольный ротор, состоящий из вал
1и диска 2, электродвигатель 3, соединенный с валом 1 через муфту 4 сцепления. Преобразователи 5 и 6
.сигналов ЛЭ акустически связаны с диском 2 в его периферийной и центрально частях через жидкостные звутчоводы 7 и 8. Преобразователи 5 и 6 сигналов ЛЭ последовательно соединены соответственно с предварительными усилителями,9-И 10, осноными усилителями П и 12, блоками 13 и 1А обработки сигналов и ключевыми схемами 15 и 16 Выходы ключевых схем 15 и 16 соединены с пер- и вторым входами блока 17 ВЫЧИСЛЕНИЯ, его первый выход соединен с блоком 18 регистрации. На некотором фиксированном расстоянии от диска
2установлен электромагнитный преобразователь 19, соединенный после- дователь}1О с формирователем 20 и блоком 21 обработки, а на диск(г 2 закреплен постоянный магнит 22. Выход блока 21 обработки соединен с тпетьим входом блока 17 вы- числеп.ия . Второй и третий врлходы блока 17 вычисления соединены соответ- CTBeiTvio с вторыз и входами ключевых сгсем 15 и 16.
Способ осуществляют след пощим образом.
При врап1ении диска 2 непрерывно измеряют уровень сигналов АЗ, регис рипуем лх преобразователем 5 ЛЭ. Сигналы ЛЭ от преобразователя 6 ЛЭ в это лремя не регистрируют, так как схема 16 закрыта. С помощью магнитного преобразователя 19, формирователя 20, блока 21 обработки и блока 17 вычислеиия выделяют опорный радиус ОЛ и регисг0
5
0
5
0
5
0
0
5
рируют его угловое положение относительно прйобрйзователя 5 ЛЭ. Сигна.ш.1 ЛЗ о т дефекта (не показан), расположеи.ного в диске 2, принимают преобразователем 5 ЛЭ. При этом уровень сигналов ЛЭ возрастает по мере прт1бл1тже1Н1я дефекта к преобразователю 5 ЛЭ и достигает пикового зна- че1П1я при прохожден1Н1 дефекта через линию, соединяющую преобразователи 5 и 6 ЛЭ, а затем вновь уменьщается. В блоке 17 в.1числения определяют угловое положение дефекта (угол о/) па диске относительно опорного радиуса ОЛ. Далее, отслеживая угловое положение опорного радиуса ОЛ относительно преобразователя 5 ЛЭ, с помощью блока 17 вычисления дают разрешение на од1 овременную регистрацию сигналов ЛЭ от обоих прц- обратователей 5 и 6 ЛЭ в момент достижения угла d. При этом в блоке 7 ны гисления на основании данных о временных интервалах прохождения сигналов ЛЭ от дефекта к преобразователям 5 и 6 ЛЭ определяют линейную (радиальную) координату дефекта. Угловую и радиальную координаты ре- гистрир пот блоком 18 регистрации.
Таким образом, предлагаемый способ позволяет определить местоположение дефекта во вращающихся объектах за счет последовательного определения угловой и линейной координат с номощью двух ненодвижных преобразователей ЛЭ, акустически связанных с объектом контроля.
Формула изобретения
Способ определения координат источников сигналов акустической эмиссии, заключающийся в том, что . пpини aют сигналы акустической эмиссии на поверхности объекта в двух точках, пзГ еряют разность времен при.хода сигналов и с ее учетом определяют коордшгаты дефе1 та, . о т л и - ч а ю щ и 11 с я тем, что, с целью расщирения технологических возможностей за счет определения местоположения дефектов во вращающихся объектах, выбирают первз/ю неподвижную точку в периферийной части объекта, непрерывнб {1змеряют уровень сигналов акустической эмиссии в первой неподвижной точке выделяют на объекте опорный.радиус с помощью магнитной метки, определяют угловое
15169646
положение дефекта на объекте относи- части объекта, а разность времен
тельно опорного радиуса по макси- прихода определяют в моменты, соотмальному, уровню сигналов акустичес- ветствующие совпадению углово1-о покой эмиссии, измеренному в первой ложения дефекта и прямой, соединяюнеподвижной точке, вторую неподвиж- щей первую и вторую неподвижные точную точку выбирают и центральной ки.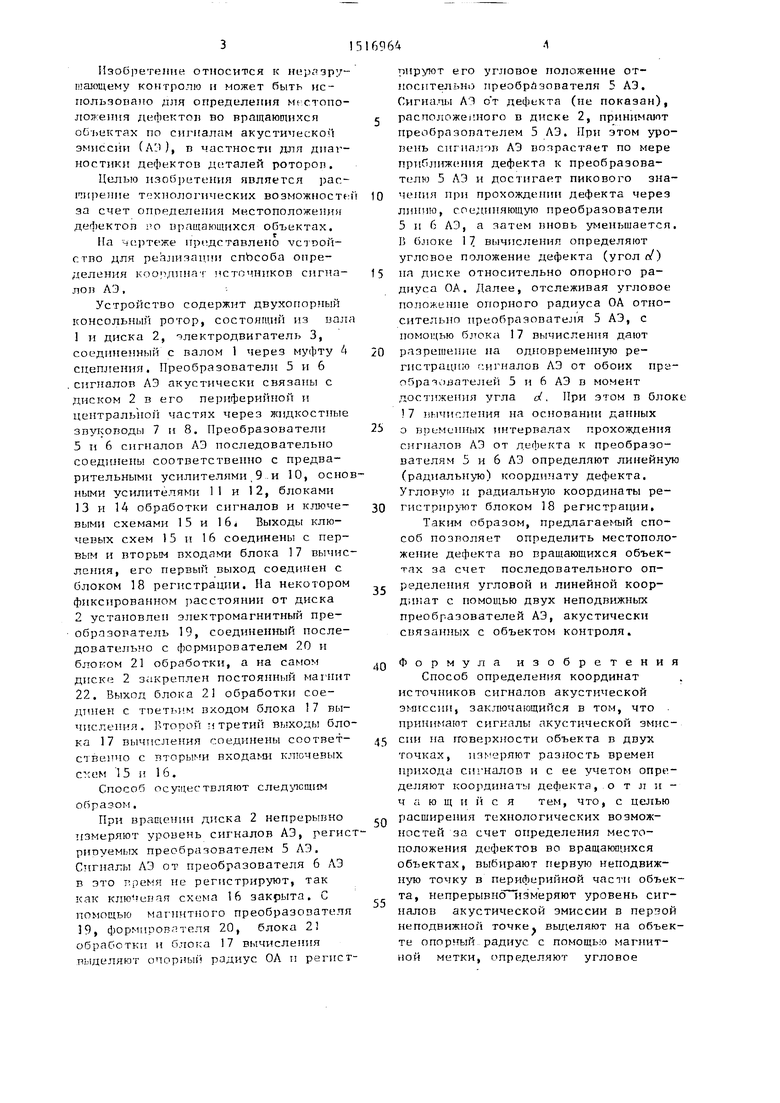
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальная система для акустико-эмиссионного контроля | 1983 |
|
SU1116385A1 |
| Способ определения местоположения усталостных трещин по сигналам акустической эмиссии | 1986 |
|
SU1516954A1 |
| СПОСОБ ЛОКАЦИИ ДЕФЕКТОВ | 2013 |
|
RU2523077C1 |
| Устройство для определения местоположения дефектов | 1979 |
|
SU789740A1 |
| СПОСОБ АКУСТИКО-ЭМИССИОННОГО КОНТРОЛЯ | 2011 |
|
RU2480742C1 |
| Способ определения координат дефектов в сварных соединениях по сигналам акустической эмиссии | 1987 |
|
SU1446554A1 |
| Способ акустико-эмиссионного контроля металлических объектов и устройство для его осуществления | 2020 |
|
RU2736175C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТЫ ИСТОЧНИКА СИГНАЛОВ АКУСТИЧЕСКОЙ ЭМИССИИ | 1990 |
|
RU1730917C |
| Устройство для определения координат источников акустической эмиссии | 1981 |
|
SU1019316A1 |
| Способ определения местоположения развивающегося дефекта в линейном объекте | 1986 |
|
SU1402923A1 |
Изобретение относится к неразрушающему контролю и может быть использовано для определения местонахождения дефектов во вращающихся объектах по сигналам акустической эмиссии (АЭ), в частности для диагностики дефектов деталей роторов. Цель изобретения - расширение технологических возможностей за счет определения местоположения дефектов во вращающихся объектах. При этом вначале определяют угловое положение дефекта по максимальному уровню сигналов АЭ, затем определяют радиальную координату триангуляционным методом. Выделяют на объекте опорный радиус с помощью магнитной метки. Преобразователи 5, 6 АЭ устанавливают неподвижно в переферийной и центральной частях объекта, осуществляют акустическую связь преобразователей 5, 6 АЭ с объектом контроля с помощью жидкостных волноводов 7, 8. О координатах дефекта судят по угловой координате, отсчитанной от опорного радиуса, и радиальной координате. 1 ил.

| Акустическая эмиссия материалов и конструкций | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ростов-на-Дону: РВВКИУ, 1984, с.122- 123 | |||
| Вакар К.Б | |||
| Акустическая эмиссия и ее применение для неразрушающего контроля в ядерной энергетике | |||
| - М.: Атомиздат, 1980, с | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
