Изобретение относится к сельскому хо- ;5яйству и может быть применено в много- опорных дождева тьных машинах, произ- ВОДЯН1ИХ орошение сельскохозяйственных культур в движении вдоль открытого канала.
Цель изобретения - повышение надежности и упрощение конструкции машины.
На фиг. 1 изображена расположенная в канале подвижная платформа, вид с торца; на фиг. 2 -- то же, вид сверху; на фиг. 3 - функциональная схема системы стабилизации движения машины; на фиг. 4 -- цент- ра.чьная тележка машины, вид спереди; на фиг. 5 - то же, вид сверху.
Система стабилизации движения машины вдоль канала содержит (фиг. 1 и 2) платформу 1, расположенную в канале и связанную 1 ибкой сцепкой с центральной тележкой машины.
Платформа 1 опирается на верхнюю кромку канала колесами 2, установ. 1енными в шарнирных осях 3. На платформе 1 в нацравляюших 4 установлены устройства 5 прижима платформы I к боковой стенке канала 6, содержащие штоки 7 и пружины 8. Устройства 5 прижима касаются боковой стен- ки канала 9 роликами 10. Нлатформа опирается на боковую стенку канала 6 роликами 11.
На платформе 1 и устройствах 5 прижима жестко установлены соответственно оси 12 и 13, в которых подвижно закреп- . leHbi тяги 14 и 15, соединенные другими концами попарно с возможностью взаимного разворота в осях 16 и 17. Оси 16 и 17 соединены между собой стержнем 18, выполненным с продольным пазом в месте установки оси 16. Стержень 18 взаимодействует с задатчиками курса, жестко связанными с центральной тележкой.
Устройство управления движением концевых тележек (фиг. 3) содержит датчик 19 курса, содержащий сигнализаторы 20 положения, взаимодействующие с направляющим стержнем 18, и устройство управления движением концевых тележек, содержащее схему 21 управления, состоящую из таймеров задающего 22 и коррекции 23 и двух логических схем 2И-ИЛИ 24, подключающих выходы С1 и С2 в зависимости от сигналов на входах В1...В4 к таймеру 22 или 23. Выходы А1 и А2 соединен1з1 с коммутационными аппаратами управления приводами концевых тележек (не показаны).
(1хема 21 соединена по входам В1...В4 с выходами А, А датчика 19 курса через схему 25 задержки, представляющую собой .юг ическо-временную схему с памятью и содержащую таймер 26, включающий в себя входную схему ИЛИ, и два элемента памяти 27, например триггеры, с входными ло1 ическими схемами И.
0
5
Q
5
5
0
5
0
5
5
0
Выходы А, А датчика 19 курса соединены с входами схемы ИЛИ таймера 26 и с входами И элементов 27 памяти, вторые входы которых соединены с выходом таймера 26.
При переключении сигнализаторов 20 датчика 19 курса команда на перек-тюче- ние выходов элементов памяти 27, и с тедо- вательно, изменение сигналов на входах В1...В4 схемы 21, задерживается на время срабатывания таймера 26, сбрасываемого при каждом изменении сигнала на его входах.
Центральная тележка машины 28 (фиг. 4 и 5) снабжена энергетической установкой 29 и водозаборным устройством 30. На тележке 28 закреплены горизонтальные балки 31 и 32, смешенные относительно центра тележки. Балки 31 гибкими тягами 33 соединены с платформой 1. На концах балок 32 жестко установлены сигнализаторы 20 датчика 19 курса, расположенные с двух сторон стержня 18. Сигнализаторы 20 взаимодействуют посредством штанг 34 со стержнем 18 платформы 1. Штанги 34 имеют возможность разворота в плоскости, перпендикулярной оси канала, а длина штанг обеспечивает их контакт со стержнем 18 при их отклонении от исходного (вертикального) положения. Цри боковом смещении или развороте тележки 28 относительно оси канала происходит смещение датчиков 19 относительно стержня 18. Следящая штанга 34 соответствующего сигнализатора (конечного выключателя), контактируя со стержнем 18, отклоняется от исходного положения, что вызывает срабатывание сигнализатора 20.
Последовательно включенные таймеры задающий 21 и коррекции 22 выполнены в виде электронного генератора импульсов. Таймер 21 выполнен в виде электронного генератора с регулируемым периодом, обеспечивающим постоянную задержку выходного сигнала на любом из его входов. Так как при каждом изменении сигналов на любом из входов таймер 26 начинает новый отсчет времени, то сигнал на его выходе, поступающий на разрещаюшие входы триггеров 27, появляется только при сохранении состояния сигнализаторов 19 в течение времени, большем уставки таймера 26, что исключает ложное переключение триггеров 27, т.е. ложное переключение выходов С1 или С2 при кратковременных изменениях состояния сигнализаторов 20.
Фронтальная многоопорная дождевальная машина работает следуюц1им обра- зо.м.
При движении вместе с центральной тележкой перемещается расположенная в канале и связанная с центральной тележкой гибкой сцепкой платформа 1.
Гибкая сцепка обеспечивает независимое от положения центральной тележки ориентирование оси платформы 1. Касающиеся боковой стенки канала 9 роликами 10 устройства 5 прижима, свободно перемещающиеся в направляющих 4, установленных по линиям, перпендикулярным оси платформы 1, в ее нижней, опущенной в канал части, обеспечивает постоянный прижим платформы I через ролики 1 к боковой стенке канала б, что исключает выход платформы 1 из канала и при параллельности боковых стенок 6 и 9 (по линиям касания роликов 10 и 11) постоянно ориентирует ось платформы 1 по оси канала. Стержень 18, связанный тягами 14 и 15 с осями 12 и 13 за счет равенства длин тяг 14 и 15, ориентирован параллельно оси платформы и сохраняет постоянное расстояние от боковых стенок канала.
Таким образом, конструкция платформы 1 позволяет уменьшить ощибку отслеживания мащиной оси канала, вызываемую изменением щирины канала по ходу движения (непараллельность боковых стенок канала 6 и 9 по линии касания роликов 10 и 11). Стержень 18 установлен в осях 16 и 17, являющихся вершинами равнобедренных треугольников, боковые стороны которых образуют имеющие равные длины тяги 14 и 15. При смещении жестко установленных на устройствах 5 прижима осей 13, вызванных изменением щирины канала на величину ЛВ, ось 16 и (или) 17 смещаются
на величину --
Стержень 18 платформы I, постоянно ориентированный параллельно оси канала и находящийся на неизменном расстоянии от этой оси, служит задатчиком курса машины, выполняя роль направляющего троса в системе стабилизации движения машины по курсу. Удержание машины на курсе осуществляется с помощью, датчиков курса, взаимодействующих со стержнем 18 платформы 1 и жестко связанных с центральной тележкой мащины.
Датчики курса при смещении или развороте этой тележки относительно оси стержня 18 выдают команду в устройство управления движением концевых тележек на изменение скорости одной из них и тем самым выравнивают положение центральной тележки и машины в целом относительно оси стержня 18 платформы 1.
Для исключения ложных срабатываний устройства управления движением концевых тележек, вызванных местными смещениями боковых стенок канала (выбоины, сдвиги боковых плит и т.д.), устройство управления движением концевых тележек дополнительно содержит схему 25 задержки, подключенную к выходам датчиков курса и обеспечивающую задержку формирования команд на изменение скорости концевых
тележек. При этом чем медленнее движется машина, тем больщее время требуется для прохождения поврежденного или неровного участка канала, поэтому время -уставки элемента времени задается обратно пропорционально заданной скорости движения мащины.
Применение предлагаемой конструкции позволяет упростить систему стабилизации по курсу, существенно снизить металлоемкость, повысить надежность стабилизации
движения машины по курсу.
Формула изобретения
Фронтальная многоопорная дождевальная мащина, включающая центральную тележку с водозаборным устройством из
канала, систему стабилизации движения водопроводящих крыльев машины с двумя датчиками курса и устройство управления движением концевых тележек, выполненное
в виде двух схем 2И - ИЛИ, первые входы которых подключены к таймерам задающему и коррекции, а вторые входы связаны с прямым и инверсным выходами двух датчиков курса, содержащими концевые выключатели, установленные с возможностью
взаимодействия с двумя стержнями, отличающаяся тем, что, с целью повыщения надежности и упрощения конструкции, машина снабжена подвижной платформой, установленной на четырех роликовых опорах на ториах стенок канала и связанной гибкой сцепкой с центральной тележкой, устройством прижима платформы к одной из боковых стенок канала, выполненным в виде передних и задних роликов опор платформы на одну из боковых стенок канала и подпружиненных относительно платформы роликов опор на другую стенку канала, продольным направляющим стержнем, установ- ленны.м подвижно с возможностью взаимодействия со стержнями в осях, кинематически связанных тягами с передними и
задними роликами опор на боковые стенки канала, а также схемой задержки, включенной между выходами датчиков курса и входами схем 2И -ИЛИ и выполненной в виде элемента ИЛИ, четыре входа которого подключены к выходам датчиков курса, таймера и двух триггерных эле.ментов памяти, снабженных схемами И на инверс- ных входах, причем первые входы триггерных элементов памяти подключены к выходам таймера, вторые - к выходам датчиков курса, а инверсные выходы триггерных элементов памяти подключены к вторым входам схем 2И-ИЛИ.
/8
xi/
У////

| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВИЖНОЕ ИРРИГАЦИОННОЕ УСТРОЙСТВО | 2007 |
|
RU2351119C1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ | 2011 |
|
RU2476067C2 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ ДЛЯ ТОЧНОГО ПОЛИВА | 2012 |
|
RU2522526C1 |
| Устройство управления многоопорной фронтальной дождевальной машиной | 1986 |
|
SU1319802A1 |
| МНОГООПОРНАЯ ДОЖДЕВАЛЬНАЯ МАШИНА ДЛЯ ПРЕЦИЗИОННОГО ОРОШЕНИЯ | 2016 |
|
RU2631896C2 |
| Система для транспортирования суспензии от выемочной машины | 1975 |
|
SU993830A3 |
| КОНВЕЙЕРНЫЙ МЕХАНИЗМ С ШАРНИРНЫМ СОЕДИНИТЕЛЕМ | 2008 |
|
RU2424937C2 |
| Устройство управления многоопорной фронтальной дождевальной машиной | 1987 |
|
SU1501986A1 |
| АГРОМОСТ | 1995 |
|
RU2084095C1 |
| Система управления концевыми тележками многоопорной дождевальной машины | 1982 |
|
SU1130274A1 |


Изобретение может быть применено в сельском хозяйстве при орошении культур многоопорными фронтальными дождевальными машинами (ДМ) с водозабором из канала. Цель изобретения - повышение надежности и упрощение конструкции ДМ. Платформа 1 благодаря гибкой сцепке с центральной тележкой и наличием устройств прижима 5 к боковым стенкам канала ориентирована по оси канала, независимо от положения центральной тележки, имеющей датчики курса, взаимодействующие со стержнем 18. Стабилизация движения машины по курсу осуществляется изменением скорости концевым тележек по командам от датчиков курса. Установка стержня 18 в общих осях 16 и 17 тяг 14 и 15 платформы 1 уменьшает ошибку отслеживания стержнем 18 оси канала из-за непараллельности боковых стенок канала, а наличие дополнительной схемы задержки, соединенной с выходами датчиков курса, исключает ложную коррекцию машины при местных неровностях стенок канала. 5 ил.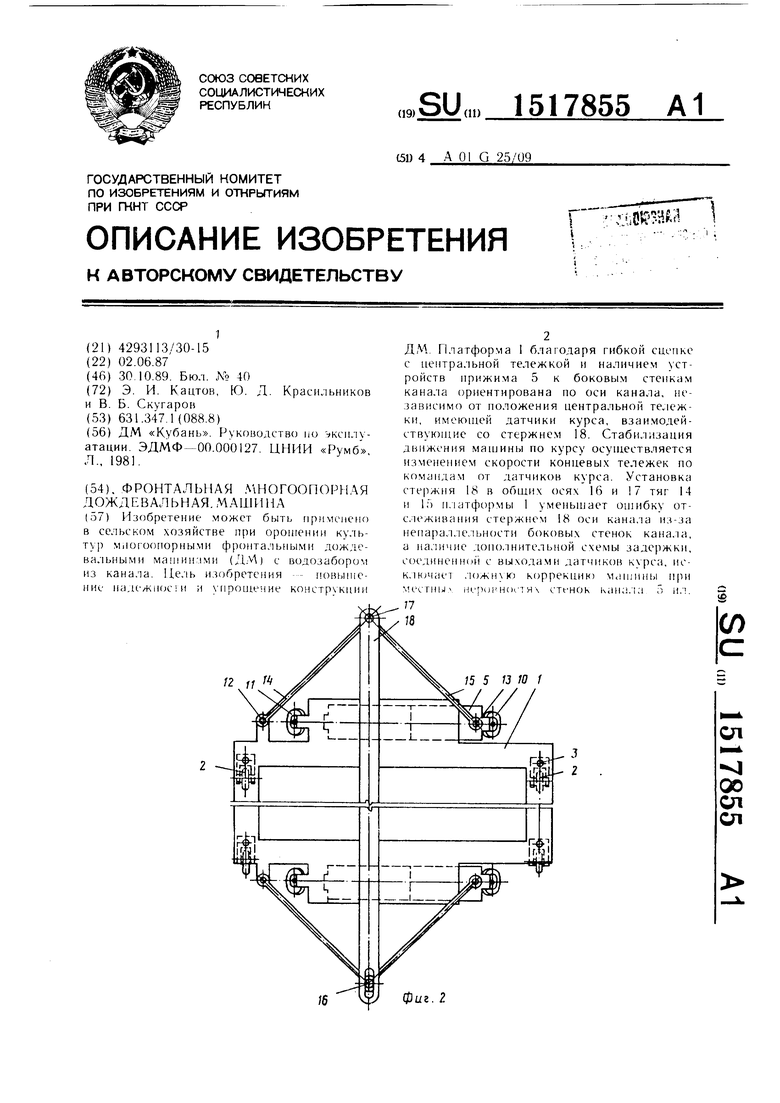
Фиг.Ч
Фиг.з
9 30
33
33
/// /// /// /// /// ///
ФигЛ
31
| ДМ «Кубань | |||
| Руководство но (ксплу- атации | |||
| ЭДМФ-00.000127 | |||
| ЦНИИ «Румб Л., 1981. |
