Изобретение относится к сельско- fy хозяйству и может быть использовано в устройствах автоматического управления движением широкозахватных дождевальных машин фронтального действия с гидравлическим,приводом опорных тележек.
Целью изобретения является повышение надежности работы машины и равномерности полива сельскохозяйственных культур.
На фиг. 1 представлена схема устройства управления многоопорной фронтальной дождевальной машиной (дм)i на фиг. 2 - схема блока формирования команд.
Устройство содержит прибор 1 стабилизации курса, которьй служит для управления скоростями движения крайних тележек 2 (левой и правой) при отклонении штанг 3 датчиков отклонения от направляющего троса А. Прибор стабилизации курса 1 соединен с блоком 5 формирования команд, пред назначенным для формирования команды на включение и отключение электрогидравлического клапана 6. Электрогидравлический клапан 6 служит для открытия и закрытия трубопровода 7 питания цилиндра 8 крайней тележки 2 (правого и левого) крыла, соединенного с основным напорным
трубопроводом 9 ДМ.
1
На гидроцилиндрах 8 крайних тележек 2 установлены датчики 10 циклов (показано детально npaiaoe крыло ДМ), представляющие собой концевые выключатели и служащие для определения количества циклов, совершаемых гидроцилиндрами 8 крайних тележек 2 Датчики 10 циклов соединены с блоком 5 формирования команд. Устройство включает также задатчик 11 скорости движения, предназначенный для задания скорости движения крайних тележек 2, зависящий от нормы полива и соединенный с блоком 5 формирования команд, зад атчик 12 скорости движения при коррекции, предназначенный для задания пониженной скорости движения крайней тележки 2 в режиме коррекции и подсоединенный к блоку 5 формирования команд, и таймер 13, представляющий собой одновибратор, предназначенньй для формирования импульсов времени и подключенный к блоку 5 формирования команд.
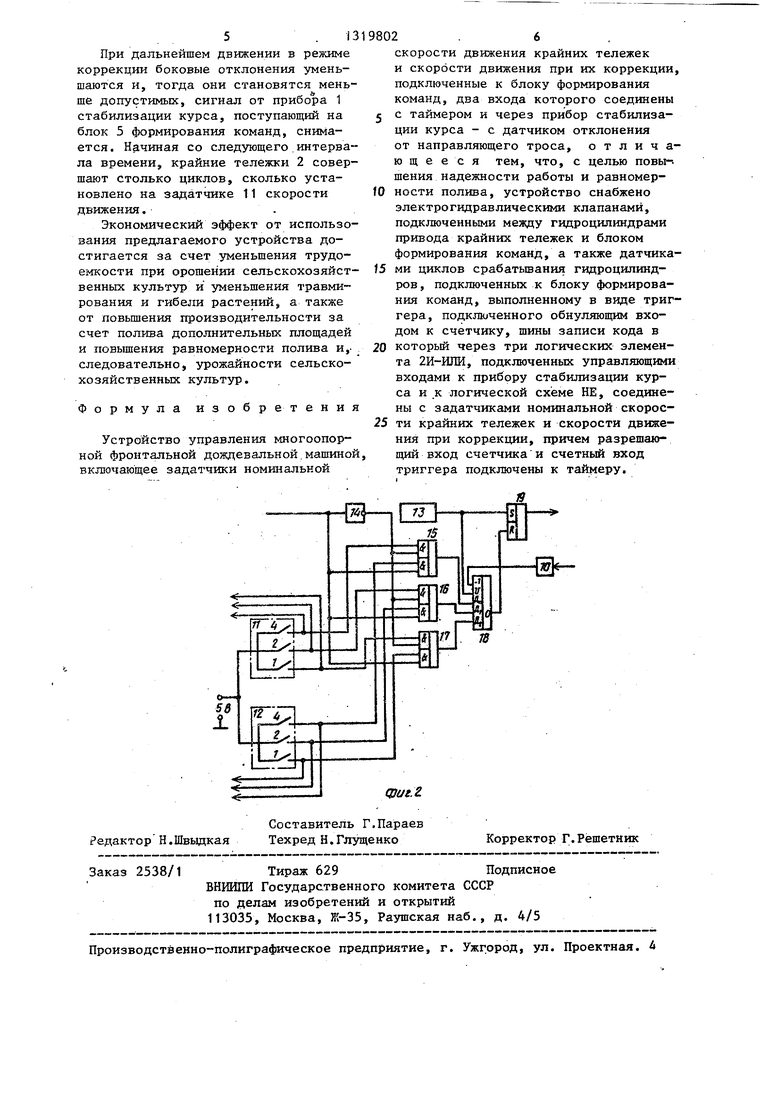
Блок 5 формирования команд (фиг. 2) состоит из инвертора 14, который служит для инвертирования сигнала коррекции, вырабатываемого прибором 1 стабилизации курса.
Выход инвертора 14 соединен с первыми входами первой половины логических элементов 2И-ИЛИ 15, 16 и 17. . На первые входы второй половины логических элементов 2И-ИЛИ 15, 16 и 17 поступает сигнал коррекции, вырабатываемый прибором 1 стабилизации курса. Выходы задатчика 11 скорости движения соединены с вторыми входами первой половины логических элементов 2И-Ш1И 15, 16 и 17. Вторые выходы задатчика 12 скорости движения при коррекции соединены с вторыми входами второй половины логических элементов 2И-ИЛИ 15, 16 и 17.
Выходы элементов 2И-ИПИ 15, 16 и 17 соединены соответственно с входами параллельной записи Д, Д, и Д, счетчика 18.
От таймера 13 сигнал поступает на разрешающий вход V счетчика 18, управляющий записью в него кода 1, и на счетный вход S триггера 19. Датчик 10 циклов, установленный на гидроцилиндре 8 крайней тележки 2, подает сигнал на вычитанщий вход 1 счетчика 18. Выход счетчика 18 соединен с обнуляющим входом R триггера 19, а вход последнего соединен с электрогидравлическим клапаном 6
крайней тележки 2.
Устройство управления фронтальной многоопорной ДМ работает следующим
40 образом.
После включения машины таймер 13 ш 1рабатывает импульс, который поступает на блок 5 формирования команд. При отсутствии отклонения от курса
5 (штанги 3 датчиков отклонения находятся в нейтральном положении) прибор стабилизации курса дает команду на блок 5 формирования команд, который вырабататает команду на вклюifQ чение электрогидравлического клапана 6. Вода из основного трубопровода 9 через трубопровод 7 питания и электрогидравлический клапан 6 поступает на гидррцилиндр 8 крайней
тележки 2. Гидроцилиндр 8 совершает циклическое возвратно-поступательное движение, приводящее к перемещению крайней тележки 2. Таймер 13 выдает импульсы с интервалами 1 мин
31
(и более), При помощи задатчика 11 скорости движения устанавливается код (двоичный, например трехразрядный фиг, 2), соответствующий скорости движения крайней тележки (например, 4 цикла), который записывается в счетчик 18 блока 5 формирования команд.
Блок 5 формирования команд работает следующим образом.
При отсутствии сигнала коррекции от прибора 1 стабилизации курса на выходе инвертора 14 присутствует логический сигнал 1, поступающий .на входы первых элементов 2И-ИЛИ 15,. 16, 17 (на входы вторых элементов 2И-ИЛИ 15, 16, 17 поступает логический О). На входы первых элементов 2И-ИЛИ 15, 16, 17 от задатчика 11 скорости движения поступает двоичный код, определяющий скорость движения крайней тележки 2, определяющий число срабатываний гидроцилиндра 8 в течение заданного интервала времени. Выходные сигналы от элементов 2И-ИЛИ 15, 16, 17, представляющие собой двоичный код скорости, поступают на входы Д, Д, Д счетчика 18 при поступлении на его разрешакндий вход V импульса от таймера 13. Этим же импульсом триггер 19 устанавливается в 1 и, таким образом, разрешает работу гидроцилиндра 8.
При выполнении каждого цикла гидроцилиндра 8 импульс от датчика 10 циклов поступает на вычитакяций вход счетчика 18, уменьщая на единицу содержимое счетчика 18. При обнулении счетчика 18 импульс с его выхода поступает на вход R триггера 19 и сбрасьюает данный триггер , запрещая работу гидроцилиндра 8 (крайняя тележка 2 останавливается) При поступлении следующего импульса от таймера -13 указанная последовательность действий повторяется.
В интервале времени 1 мин гидро- цнлиндр 8 может совершать различное число циклов, например шесть. Количество циклов, совершенных гидроцилиндром 8 крайней тележки 2, фиксируется датчиком 10 диклов , и посту - пает на блок 5 формирования команд на вычитающий вход заданного числа циклов, например шесть.
При совершении гидроцилиндром 8 крайней тележки 2 циклов блок 5 фоо24
мирования команд снимает команду включения с электрогидравлического клапана 6 и последний закрывается, тем самым прекращая подачу воды из
основного трубопровода 9 по трубопроводу 7 питания. При поступлении следующего импульса таймера 13 цикл работы повторяется.
Если под действием внешних возмущающих воздействий (неровность поля, ветер, проскальзывание тележек и др.) машина отклоняется от заданного направления движения, то при превышении боковым отклонением
машины предельно допустимого значения датчики отклонения от направляющего троса 4 вьщают сигнал на прибор 1 стабилизации курса, который в свою очередь вырабатьтает сигнал на
блок 5 формирования команд.
При поступлении импульса времени от таймера 13 на блок 5 формирования команд последний с учетом сигнала прибора 1 стабилизации курса формирует команду на включение электрогидравлического клапана 6.
После включения электрогидравлического клапана 6 через него поступает вода на гидроцилиндр 8 из основного трубопровода 9 через трубопровод 7 питания. Гидроцилиндр 8 начинает совершать возвратно-поступательное движение. В то же время датчик 10 циклов фиксирует количество
циклов, совершенных гидрбцилиндром 8. При достижении количества циклов, совершенных гидроцилиндром 8, числа в двоичном коде, установленного на задатчике 12 скорости при коррекции
и записанного в счетчике 18, последний обнуляется, сбрасывает в О триггер 19 и команда на включение электрогидравлического клапана 6 снимается.
I
Последний перекрьшает поступление воды в гидроцилиндр 8, например при коррекции скорость крайней тележки замедляется в 2 раза (т.е. при
срабатывании гидроцилиндра), при трех срабатываниях гидроцилиндров в режиме коррекции крайняя тележка совершает три цикла в минуту. Таким образом, при коррекции гидроцилиндр
8 крайней тележки 2 совершает столько циклов, сколько установлено за- датчиком 12 скорости движения при коррекции.
5 .13 При дальнейшем движении в режиме коррекции боковые отклонения уменьшаются и, тогда они становятся меньше допустимых, сигнал от прибора 1 стабилизации курса, поступающий на блок 5 формирования команд, снимается . Начиная со следующего интервала времени, крайние тележки 2 совершают столько циклов, сколько установлено на задатчике 11 скорости движения..
Экономический эффект от использования предлагаемого устройства достигается за счет уменьшения трудоемкости при орошении сельскохозяйственных культур и уменьшения травмирования и гибели растений, а также от повьш1ения производительности за счет полива дополнительных площадей и повышения равномерности полива и,- следовательно, урожайности сельскохозяйственных культур.
Формула изобретения
Устройство управления многоопорной фронтальной дождевальной.машиной включающее задатчики номинальной
. 6
скорости движения крайних тележек и скорости движения при их коррекции, подключенные к блоку формирования команд, два входа которого соединены
с таймером и через прибор стабилизации курса - с датчиком отклонения от направляющего троса, отличающееся тем, что, с целью повы-. шения надежности работы и равномерности полива, устройство снабжено электрогидравлическими клапанами, подключенными между гидроцилиндрами привода крайних тележек и блоком формирования команд, а также датчиками циклов срабатьшания гидроцилиндров, подключенных к блоку формирования команд, выполненному в виде триггера, подключенного обнуляюш;им входом к счетчику, шины записи кода в
который через три логических элемента 2И-ИЛИ, подключенных управляющими входами к прибору стабилизации курса и .к логической схеме НЕ, соединены с задатчиками номинальной скорости крайних тележек и скорости движения при коррекции, причем разрешающий вход счетчика и счетный вход триггера подключены к таймеру.
рЗагъ /7
2,
4
JS
5в ±
Я.
li:
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления многоопорной фронтальной дождевальной машиной | 1987 |
|
SU1410917A1 |
| Устройство управления многоопорной фронтальной дождевальной машиной | 1987 |
|
SU1501986A1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ | 2011 |
|
RU2476067C2 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ ДЛЯ ТОЧНОГО ПОЛИВА | 2012 |
|
RU2522526C1 |
| Фронтальная многоопорная дождевальная машина | 1987 |
|
SU1517855A1 |
| Устройство для управления электрической дождевальной машиной | 1987 |
|
SU1554831A1 |
| Устройство автоматизированного управления многоопорной фронтальной дождевальной машиной | 1986 |
|
SU1391544A1 |
| МНОГООПОРНАЯ ДОЖДЕВАЛЬНАЯ МАШИНА ДЛЯ ПРЕЦИЗИОННОГО ОРОШЕНИЯ | 2016 |
|
RU2631896C2 |
| Устройство для управления многоопорной фронтальной дождевальной машиной | 1987 |
|
SU1496717A1 |
| Устройство управления электрофицированной дождевальной машиной | 1988 |
|
SU1547783A1 |
Изобретение относится к сельскому хозяйству и может быть .применено для управления многоопорными фронтальными дождевальными машинами (ДМ) стабилизации курса. Целью изобретения является повьшение надежности работы машины и равномерности полива. Устройство включает задатчик 11 номинальной скорости и задатчик 12 скорости при коррекции движения ДМ, подключенные к ним блок 5 формирования команд с таймером 13, прибор стабилизации курса 1 с датчиками отклонения от направляющего троса 4. Управление скоростью по сигналам блока формирования команд движения с номинальной или с замедленной в режиме коррекции скоростью осуществляется посредством электрогидравлических клапанов 6, подающих напорную воду к гидроцилиндрам 8 крайних тележек 2. Использование датчика 10 циклов совместно с предложенной конструкцией блока 5 формирования команд позволяет заменить остановку тележек во время режима коррекции скорости движением с меньшей, чем в основном (номинальт ном) режиме, скоростью, что приводит к исключению площадей переполива под остановившимися тележками, повьшиению равномерности движения и полива и повьш1ению урожайности культур Использование электронных и гидравлических элементов повьшхает надежность работы устройства. 1 ил. (Л с z Фа.1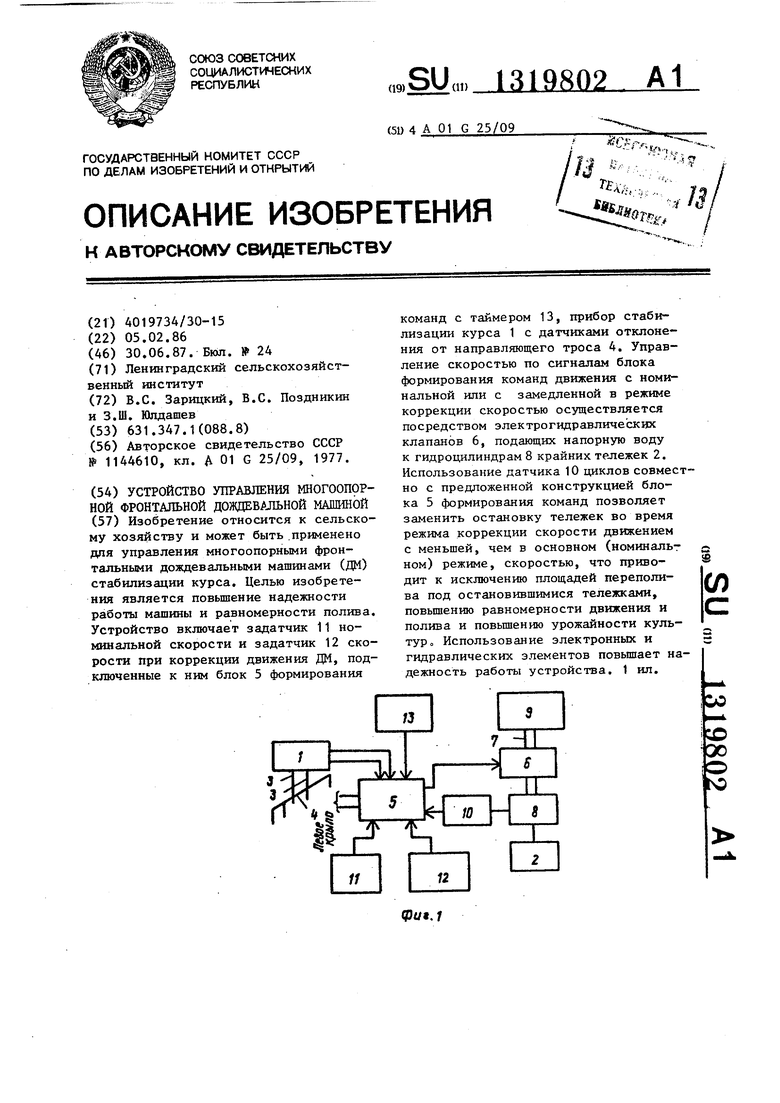
Редактор Н.Швьщкая
Составитель Г.Параев Техред Н.Глущенко
Заказ 2538/1 Тираж 629Подписное
ВНИИ1Ш Государственного комитета СССР по делам изобретений и открытий 113035, Москва, К-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная. Л
Корректор Г.Решетник
| Дождевальная система | 1978 |
|
SU1144610A3 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
