1
(21)4357138/24-09
(22)04.01.88
(46) 30.10.89. Бюп. № 40
(72) Д.Ю. Пакачимас, В.Л. Чюплинскас
и В.В. Галванаускас
(53) 621.397.3(088.8)
(56) Авторское свидетельство СССР
№ 1275789, кл. ,Н 04 N 17/00, 1986.
(Ь4) УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ ()МАГНИТНЫХ отклоняющих СИСТЕМ
(Ь7) зобретение относится к радиотехнике. Цель изоСфетення - расширение функциональных возможностей. Уст- poiicTBo сонтроля параметров электромагнитных о клоняюпд1х систем содержит
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического контроля электронно-оптических параметров магнитных отклоняющих систем | 1985 |
|
SU1275789A1 |
| Устройство контроля чувствительности магнитных отклоняющих систем | 1985 |
|
SU1269276A1 |
| Устройство передачи и приема сигнала изображения | 1988 |
|
SU1596488A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ | 1994 |
|
RU2096927C1 |
| Устройство для определения координат объекта | 1986 |
|
SU1354226A1 |
| Устройство кадровой развертки | 1985 |
|
SU1261139A1 |
| Устройство для бинарного квантования телевизионного видеосигнала | 1983 |
|
SU1129745A1 |
| Телевизионный цветосинтезатор | 1977 |
|
SU690654A1 |
| Электронный синтезатор светомузыкальных изображений на цветной электронно-лучевой трубке | 1987 |
|
SU1540844A1 |
| Устройство автоматической коррекции координатных искажений телевизионного изображения | 1981 |
|
SU1012456A1 |
Изобретение относится к радиотехнике. Цель изобретения - расширение функциональных возможностей. Устройство контроля параметров электромагнитных отклоняющих систем содержит задающий г-р 1, усилитель 2 мощности, коммутаторы 3 и 4, конденсаторы 5 и 6, строчные и кадровые катушки 7 и 8 отклоняющей системы 9, помещенной на измерительной коловке 10 с двухкомпонентными датчиками 11-19, регулятор 20 тока, блок управления 21, блок запуска 22, блок юстировки 23, сумматоры 24-31, аналоговые преобразователи 32-39, вычитатели 40-45, блоки задержки 46-48, блоки перемещения 49-51 начала координат, блоки выделения 52-58 модуля сигнала, многовходовый компаратор 59 и индикатор 60. Цель достигается путем обеспечения измерения асимметрии магнитного поля и максимальных величин параметров остаточного несведения лучей. 4 ил.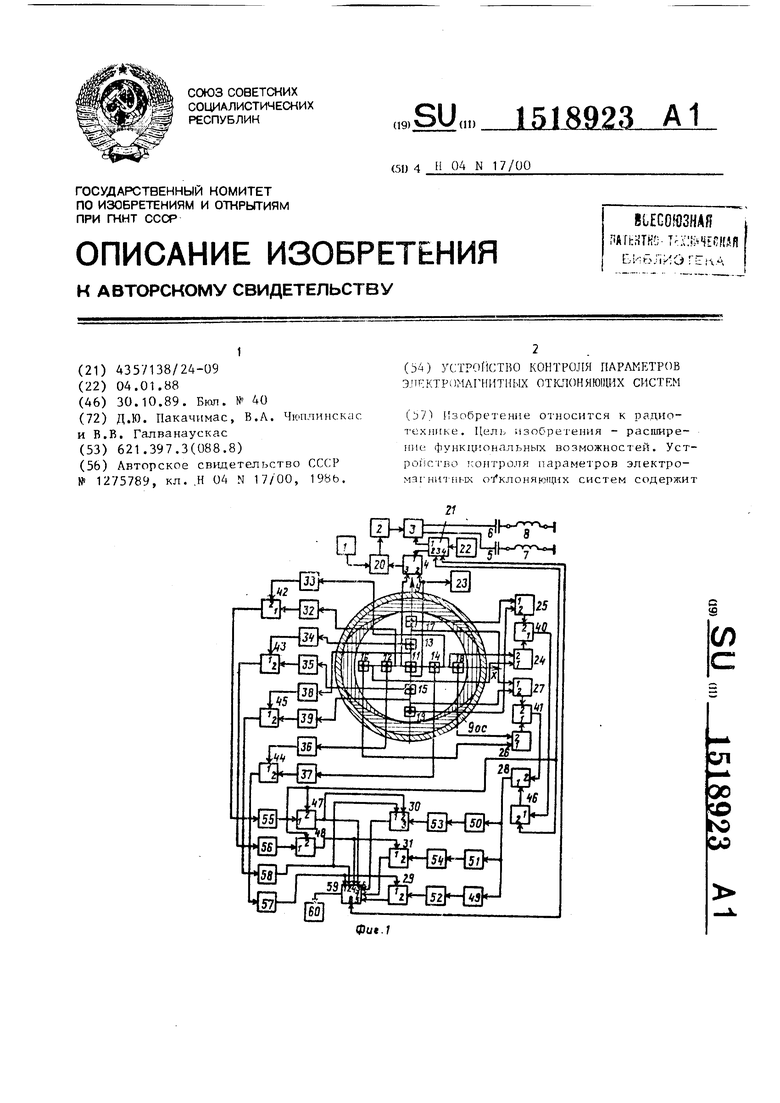
С/)
31 )18У2
усилит€ 1Ь 2 мощности,
i.i.naiorurn г-р чомму i ,ч (ijih; ) и . конденсаторы Ь и 1, (-;почные и кадропь(е катушки У и 8 ртклс,ишетчей системы 9, помещенной на (. головке 10 с двухком- ионентными датчиками 11-19, регулятор 2U ток;, блок управлении 21, блок запуска 22, блок юстировки 23, сумматоры 24- i1, аналоговые преобразователи
10
Изобретение относится к радиотехнике и может быть использовано в измерительной технике при разработке, производстве и контроле качества электромагнитных отклоняющих систем (ОС) черно-белых и цветных кинескопов.
Цель изобретения - расширение функциональных возможностей путем обеспе- че}1ия измерения асимметрии магнитного поля и максимальных величин параметров остаточного несведения лучей.
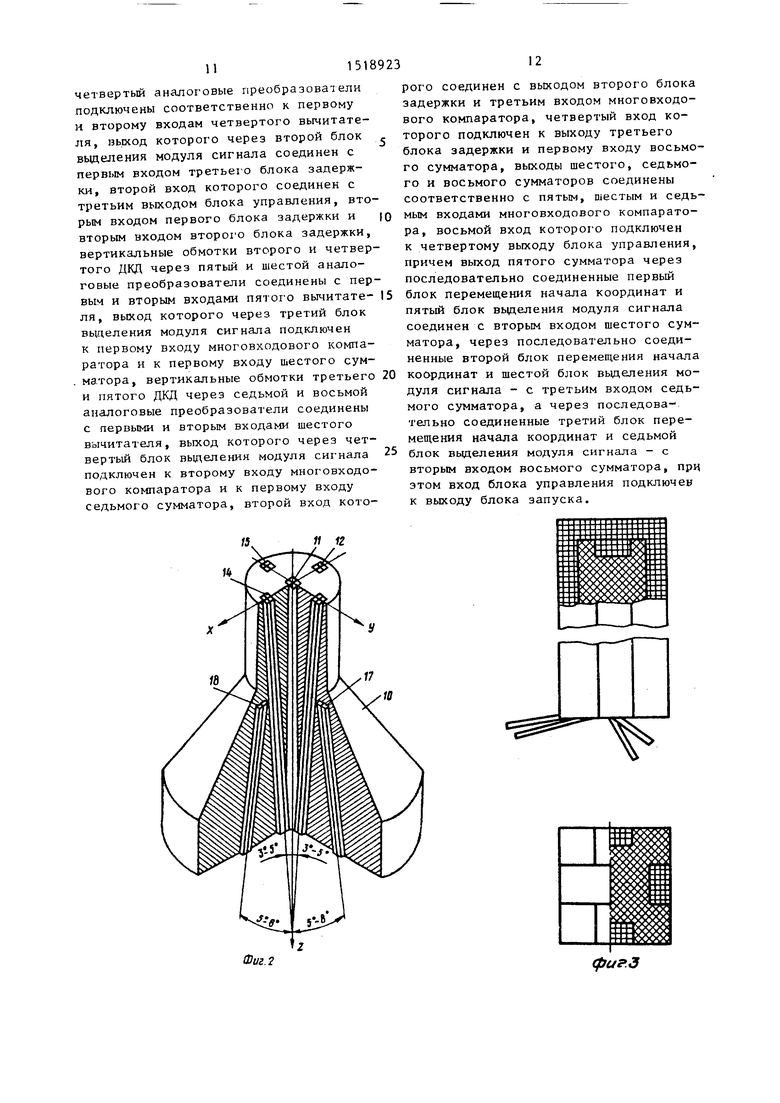
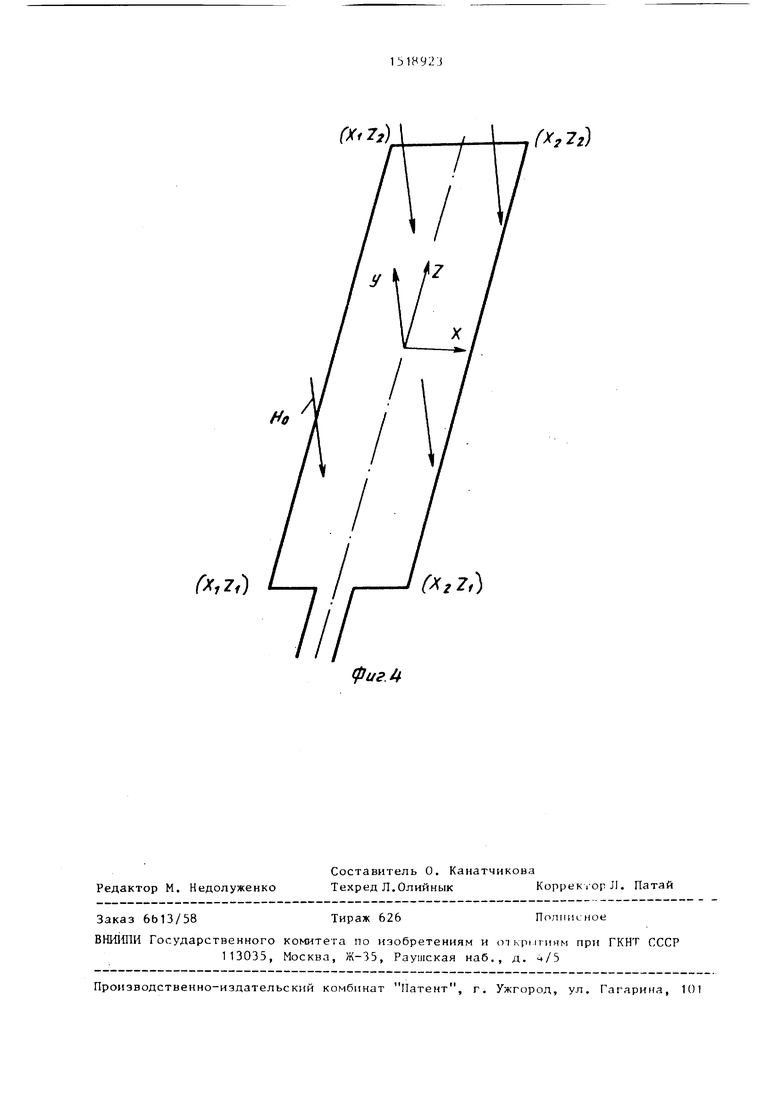
На фиг. 1 приведена структурная электрическая схема устройства контроля параметров электромагнитных от- клонякщих систем; на фиг. 2 - измерительная г оловка и расположение в ней двухкомпонентых датчиков, общий вид; на фиг. 3 - конструк1Д1Я двухкомпонент- ииго датчика; на фиг. 4 - схема рас- шшожения одной обмотки двухкомпо- нентного датчика в магнитном поле ОС.
Устройство контроля (фиг. 1) со- держ1-гг зaдaюIЩ й генератор 1 , усилитель 2 мощности, первый и второй коммутаторы 3 и 4, первый и второй конденсаторы 5 и 6, строчные и кадровые катушки / и 8 ОС 9, помещенной на измерительной головке 10 с девятью двух компоне Нтными датчиками 11-19, регулятор 20 тока, блок 21 управления, блок 22 запуска, блок 23 юстировки,восемь сумматоров 24-31, восемь аналоговых преобразователей 32-39, шесть вы- читателей 40-45, три блока 46-48 задержки, три блока 49-51 перемещения начала координат, семь блоков 52-58 выделения модуля сигнала, многовхо- довый компаратор 59 и индикатор 60.
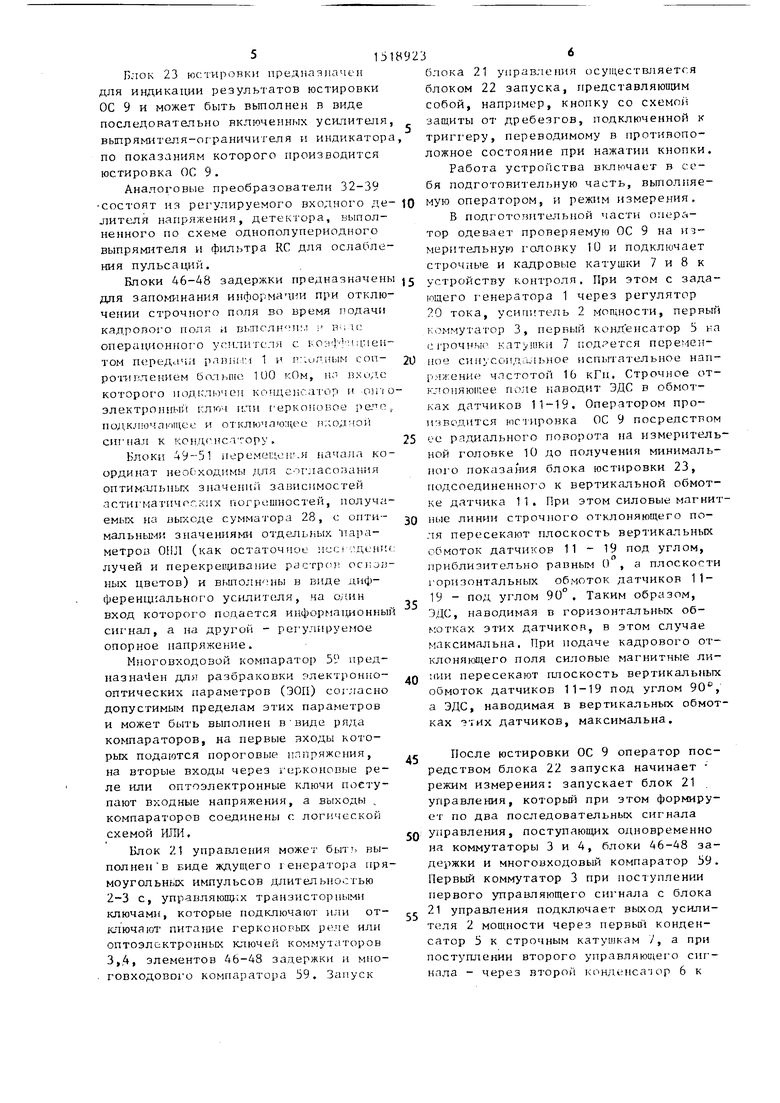
Измерительная головка 10 (фиг. 2) выполнена из немагнитного изоляционного материала. В центре ее на продольной оси помещен двухкомпонентный датчик 11. Четьфе двухкомпонентных
J2-.4), вычитатели (J-AS, блоки задержки 46-48, блоки перемещения 49- 51 начала координат, блоки выделения 52-58 модуля сигнала, многовходовый компаратор 59 и индикатор 60. Цель достигается путем обеспечения измерения асимметрии магнитного поля и максимальных величин параметров остаточного несведения лучей. 4 ил.
0
5
0
5
0
5
0
5
датчика 12-15 размещены у внутренней поверхности цилиндрической части измерительной головки 10 под углом 3-5 к продольной ее оси с вершиной угла в в конусной части измерительной головки попарно во взаимно перпендикулярных плоскостях.
Четыре двухкомпонентных датчика 16-19 расположены в конусной части измерительной головки 10 у ее внутренней поверхности под углом 5-8° к продольной оси измерительной головки с вершиной угла в цилиндрической ее части попарно во взаимно перпендикулярных плоскостях.
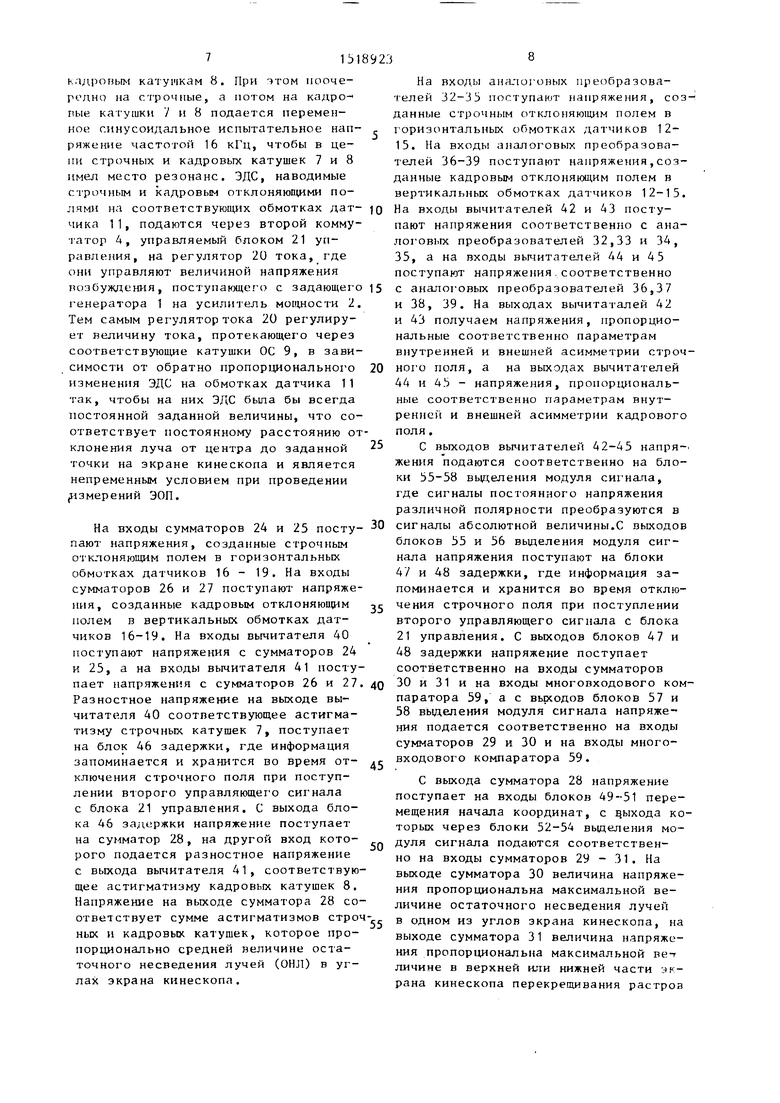
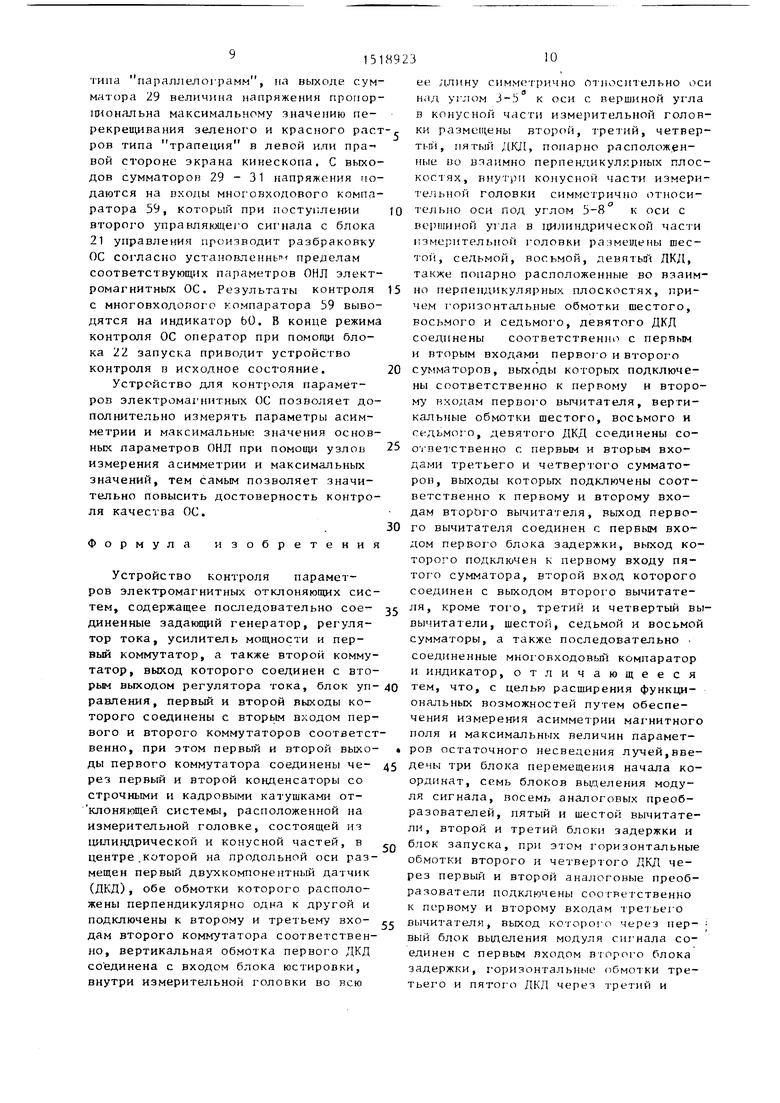
Конструктивно обмотки двухкомпонентных датчиков 11-19 (фиг. 3) выполнены в виде длинных прямоугольных рамок, плоскости которых расположены взаимно перпендикулярно одна к другой и расположены одна в горизонтальной, а другая в вертикальной плоскостях отклонения электронного луча. Каждая из обмоток датчиков интегрирует измеряемую составляющую магнитного поля, например Н (фиг. 4), силовые линии которой перпендикулярны этой плоскости, в пределах интегрирования, соответствующих длине и ширине Х обмотки датчика.
Длина датчиков 11-15 должна быть не меньше длины участка существования магнитного поля ОС на ее прод ольной оси и практически составляет 150 - 200 мм, а длина датчике 16-19 соответствует длине конусной части ОС и практически составляет 60-100 мм, число витков в одной обмотке каждог о датчика 60-100.
Коммутаторы 3 и 4 могут быть выполнены в виде герконовых реле или оптоэлектронных ключей аналогового сигнала.
Блок 23 rocTVipOBKH предназначен для индикации результатов юстировки ОС 9 и может быть выполнен в виде последовательно иключеиных усилителя, выпрямителя-ог раничителя и индикатора, по показаниям которого производится юстировка ОС 9.
Аналоговые преобразователи 32-39
состоят иа регулируемого входного де- tO ую оператором, и режим измерения,
лителя напряжения, детектора, выполненного по схеме однополупериодного выпрямителя и фильтра RC для ослабления пульсаций.
Блоки 46-48 задержки предназначены jj устройству контроля
для запоминания информации при отключении строчного поля во время подачи кадрового поля и вьтслн 11;л ; в;IK; операционног о усилителя с itoii l hiitneii- том передачи равпгк 1 и irujrnbiM соп- ро ивлепием больп е 1UO кОм, иг. в.чоде которого подкличеи конденсатор и oino- электрО1П ЬВ ключ или геркоиовое подключающее и отключаю:цее н;;одиой си1 пал к (М1сатору ,
Блоки 49-51 перемещен .я tia4ana координат необходимы для сог ласопания оптимШ1ьпьк значений зависимостей астигматических погрешностей, получаемых на выходе сумматора 28, с опти- мальньв-1и значениями отдель}1ых Параметров ОНЛ (как остаточное ;icci .щение лучей и nepeKpeuj -iBaiine растрС Г oci;ai3- ных цветов) и вьитолнены в виде дифференциального усилителя, на один вход которого подается информациюниый сиг нал, а на другой - регулируемое опорное напряжение.
Многовходовой компаратор 59 пред- назпа4ен для разбраковки электронно- оптических параметров (ЗОИ) согласно допустимым пределам этих параметров и может быть выполнен в виде ряда компараторов, на первые входы которых подаются пороговые нлпряжения, на вторые входы через 1 ерконовые реле или оптоэлектронные ключи поступают Входные напряжения, а выходы компараторов соединены с логической схемой ИЛИ.
Блок 21 управления может бытт выполнен в виде ждущего генератора пря- моугольньгх импульсов длительностью 2-3 с, управляющих транзисторными
2L)
25
30
35
40
45
50
Б подготовительн тор одевает проверя мерит{ельную головку строчные и кадровые
ющего генератора 1 20 тока, усипитель коммутатор 3, первы сгрочныг катушки 7 ное синусо11дги1ьное ряжение частотой 16 клоняющее поле навод ках датчиков 11-19. изводится юстировка ое радиального пово ной головке 10 до по ного показания блок подсоединеннот о к в ке датчика 11. При ные линии строчного ля пересекают плоско обмоток датчиков 11 приблизительно равны горизонтальных обмо 19 - под углом 90°. ЭДС, наводимая в гор мотках этих датчиков максимальна. При под клоняющего поля сило ;(ии пересекают плоск обмоток датчиков 11а ЭДС, наводимая в в ках этих датчиков, м
После юстировки О редством блока 22 за режим измерения: зап управления, который ет по два последоват управления, поступаю на коммутаторы 3 и 4 держки и многовходов Первый коммутатор 3 первого управляющего 21 управления подклю теля 2 мощности чере сатор 5 к строчным к поступлении второго нала - через второй
ключами, которые подключают или отключают питагше герконовых реле или оптоэлектроиных ключей коммутаторов 3,.4, злементов 46-48 задержки и мио- говходового компаратора 59. Запуск
блока 21 управления осуществляется блоком 22 запуска, представляюишм собой, например, кнопку со схемой защиты от дребезгов, подключенной к трип-еру, переводимому в противоположное состояние при нажатии кнопки.
Работа устройства включает в себя подготовительную часть, вьгполияеjj устройству контроля
2L)
25
30
35
0
5
0
5
Б подготовительной части оператор одевает проверяемую ОС 9 на мерит{ельную головку 10 и подключает строчные и кадровые катушки 7 и 8 к
При этом с задающего генератора 1 через регулятор 20 тока, усипитель 2 мощности, nepBbrfi коммутатор 3, первый конденсатор 5 на сгрочныг катушки 7 под.- ется переменное синусо11дги1ьное испытательное напряжение частотой 16 кГп. Строчное отклоняющее поле наводит ЭДС в обмотках датчиков 11-19. Оператором производится юстировка ОС 9 посредством ое радиального поворота на измеритель- ной головке 10 до получения минимального показания блока юстировки 23, подсоединеннот о к вертикальной обмотке датчика 11. При этом силовые магнитные линии строчного отклоняющего поля пересекают плоскость вертикальных обмоток датчиков 11-19 под углом, приблизительно равным О , а плоскости горизонтальных обмоток датчиков 11- 19 - под углом 90°. Таким образом, ЭДС, наводимая в горизонтальных обмотках этих датчиков, в этом случае максимальна. При подаче кадрового отклоняющего поля силовые магнитные ли- ;(ии пересекают плоскость вертикальных обмоток датчиков 1119 под углом 90, а ЭДС, наводимая в вертикальных обмотках этих датчиков, максимальна.
После юстировки ОС 9 оператор посредством блока 22 запуска начинает режим измерения: запускает блок 21 управления, который при этом формирует по два последовательньк сигнала управления, поступающих одновременно на коммутаторы 3 и 4, блоки 46-48 задержки и многовходовый компаратор 59. Первый коммутатор 3 при пос1уплении первого управляющего сигнала с блока 21 управления подключает выход усилителя 2 мощности через первьв конденсатор 5 к строчным катушкам У, а при поступлении второго управляющего сигнала - через второй конденса-iop 6 к
7li.1
кадроным катушкам 8. При этом поочередно на строчные, а потом на кадро- лые катушки V и 8 подается переменное синусоидальное испытательное нап- ряжение частотой 16 кГц, чтобы в цепи строчных и кадровых катушек 7 и 8 имел место резонанс. ЭДС, наводимые строчным и кадровым отклоняющими полями на соответствующих обмотках дат- чика 11, подаются через второй коммутатор А, управляемый блоком 21 управления, на регулятор 20 тока, где они управляют величиной напряжения возбуждения, поступающего с задающего генератора 1 на усилитель моиуюсти 2. Тем самым регулятор тока 20 регулирует величину тока, протекающего через соответствующ ие катушки ОС 9, в зависимости от обратно пропорционального изменения ЭДС на обмотках датчика 11 так, чтобы на них ЭДС быпа бы всегда постоянной заданной величины, что соответствует постоянному расстоянию отклонения луча от центра до заданной точки на экране кинескопа и является непременным условием при проведении 1змерений ЭОП.
На входы сумматоров 24 и 25 посту- пают напряжения, созданные строчным о 1 клоняющим полем в горизонтальных обмотках датчиков 16 - 19. На входы сумматоров 26 и 27 поступают напряжения, созданные кадровым отклоняющим полем в вертикальных обмотках датчиков 16-19. На входы вьмитателя 40 поступают напряжения с сумматоров 24 и 25, а на входы вычитателя 41 поступает напряжения с сумматоров 26 и 27 Разностное напряжение на выходе вычитателя 40 соответствующее астигматизму строчных катушек 7, поступает на блок 46 задержки, где информация запоминается и хранится во время от- ключения строчного поля при поступлении второго управляющего сигнала с блока 21 управления, С выхода блока 46 задержки напряжение поступает на сумматор 28, на другой вход которого подается разностное напряжение с выхода вычитателя 41, соответствующее астигматизму кадровых катушек 8. Напряжение на выходе сумматора 28 соответствует сумме астигматизмов строчньк и кадровых катушек, которое пропорционально средней величине остаточного несведения лучей (ОНЛ) в углах экрана кинескопа.
5 0 5
0
5
На входы ана101-овых преобразователей 32-33 поступают напряжения, созданные строчным ОТКЛОНЯЮ1ЦИМ полем в горизонтальных обмотках датчиков 12- 15. На входы аналоговых преобразователей 36-39 поступают напряжения,созданные кадровым отклоняющим полем в вертикальных обмотках датчиков 12-15. На входы вычитателей 42 и 43 поступают напряжения соответственно с аналоговых преобразователей 32,33 и 34, 35, а на входы вычитателей 44 и 45 поступают напряжения,соответственно с аналоговых преобразователей 36,37 и 38, 39. На выходах вычитаталей 42 и 43 получаем напряжения, пропорциональные соответственно параметрам внутренней и внешней асимметрии строчного поля, а на выходах вычитателей 44 и 45 - напряжения, пропорциональные соответственно параметрам внутренней и внешней асимметрии кадрового поля,
С выходов вычитателей 42-45 напря- жения подаются соответственно на блоки 55-58 вьделения модуля сигнапа, где сигналы постоянного напряжения различной полярности преобразуются в сигналы абсолютной величины.С выходов блоков 55 и 56 выделения модуля сигнала напряжения поступают на блоки
47и 48 задержки, где информация запоминается и хранится во время отключения строчного поля при поступлении второго управляющего сигнала с блока 21 управления. С выходов блоков 47 и
48задержки напряжение поступает соответственно на входы сумматоров
30 и 31 и на входы многовходового компаратора 59, а с вькодов блоков 57 и 58 вьщеления модуля сигнапа напряже ния подается соответственно на входы сумматоров 29 и 30 и на входы многовходового компаратора 59.
С выхода сумматора 28 напряжение поступает на входы блоков 49-51 перемещения начала координат, с цыхода которых через блоки 52-54 вьщеления модуля сигнала подаются соответственно на входы сумматоров 29 - 31. На выходе сумматора 30 величина напряжения пропорциональна максимальной величине остаточного несведения лучей в одном из углов экрана кинескопа, на выходе сумматора 31 величина напряжения пропорциональна максимальной ве-г личине в верхней или нижней части экрана кинескопа перекрещивания растров
типа параллелограмм , на выходе сумматора 29 величина напряжения пропорциональна максимальному значению перекрещивания зеленот о и красного растров типа трапе1Ц1я в левой или npa-i вой стороне экрана кинескопа, С выходов сумматоров 29-31 напряжения гю- даются на входы многовходового компаратора 59, который при поступлении второго управляющего сигнала с блока 21 управления производит разбраковху ОС со1 ласно ycTanoaneHHbi пределам соответствующих параметров ОНЛ электромагнитных ОС. Результаты контроля с многовходопого компаратора 59 выводятся на индикатор ЬО. В конце режима контроля ОС оператор при помощи блока 22 запуска приводит устройство контроля п исходное состояние.
Устройство для контроля параметров электромагнитных ОС позволяет дополнительно измерять параметры асимметрии и максимальные значения основных параметров ОНЛ при помощи узлов измерения асимметрии и максимальных значений, тем самым позволяет значительно повысить достоверность контроля качества ОС.
Формула изобретения
Устройство контроля параметров электромагнитных отклоняющих систем, содержащее последовательно сое- диненные задающий генератор, регулятор тока, усилитель мощности и первый коммутатор, а также второй коммутатор, выход которого соединен с вто
ым выходом регулятора тока, блок уп- 40 тем, что
, 41U ональных чения из поля и ма ров оста три ординат, ля сигнал разовател ли, второ блок запу обмотки в рез первы разоватап к первому вычитател вый блок единен с задержки тьего и п
равления, первый и второй выходы которого соединены с вторььм входом первого и второго коммутаторов соответственно, при этом первьм и второй выхо- ды первого коммутатора соединены че- рез первый и второй конденсаторы со строчными и кадровыми катушками от- клоняющей системы, расположенной на измерительной головке, состоящей из цилиндрической и конусной частей, в центре.которой на продольной оси размещен первый двухкомпонентный датчик (ДКД), обе обмотки которого расположены перпендикулярно одна к другой и подключены к второму и третьему вхо- дам второго коммутатора соответственно, вертикальная обмотка первого ДКД со единена с входом блока юстировки, внутри измерительной головки во всю
0
5 0
0
5
5
ее длину симметрично относительно оси над 3-Ь к оси с вершиной угла в конусной части измерительной головки размещены второй, третий, четвер- тьй, пятый ДКЛ, попарно расположенные во взаимно перпендикулярных плоскостях, внутри конусной части измери- те.пьной головки симметрично относительно оси под углом 5-8 к оси с вершиной угла в цилиндрической части измерительной головки размещены шестой, седьмой, восьмой, девлтьп1 ЛКД, также попарно расположенные во взаимно перпендикулярных плоскостях, причем 1 оризонтальные обмотки шестого, восьмого и седьмого, девятого ДКД соединены соответственш с первым и вторым входами первого и второго сумматоров, выходы которых подключены соответственно к первому и второму входам первого вычитателя, вертикальные обмотки шестого, восьмого и седьмог о, девятого ДКД соединены со- о гветственно с первым и вторым входами третьего и четвертого сумматоров, выходы которых подключены соответственно к первому и второму входам второго вычитателя, выход первого вычитателя соединен с первым входом первог о блока задержки, выход которого подключен к первому входу пятого сумматора, второй вход которого соединен с выходом второго вычитателя, кроме того, третий и четвертый вы- вычита1ели, шестой, седьмой и восьмой сумматоры, а также последовательно . соединенные мног овходовый компаратор и И1адикатор, отличающееся
40 тем, что
5
0
, 41U, с целью расширения функциональных возможностей путем обеспечения измерения асимметрии магнитного поля и максимальных величин параметров остаточного несведения лучей,вве- три блока перемещения начала координат, семь блоков вьщеления модуля сигнала, восемь аналоговых преобразователей, пятый и шестой вычитате- ли, второй и третий блоки задержки и блок запуска, при этом горизонтальные обмотки второго и четвертого ДКД через первый и второй аналоговые преоб- разоватапи подключены соответственно к первому и второму входам третьего вычитатели, выход которог о через пер- j вый блок выделения модуля сигнала соединен с первым входом второго блока задержки, г оризонтальные обмотки третьего и пятого ДКД через третий и
етвертый аналоговые преобразователи одключены соответственно к первому второму входам четвертого вычитате- я, нькод которого через второй блок вьщеления модуля сигнала соединен с первым входом третьего блока задержки, второй вход которого соединен с третьим выходом блока управления, вторым входом первого блока задержки и ю вторым входом второго блока задержки, вертикальные обмотки второго и четвертого ДКД через пятый и шестой аналоговые преобразователи соединены с первым и вторым входами пятого вычитате- 15 ля, выход которого через третий блок вьщеления модуля сигнала подключен к первому входу многовходового компаратора и к первому входу шестого сум- матора, вертикальные обмотки третьего и пятого ДКД через седьмой и восьмой аналоговые преобразователи соединены с первыми и вторьм входами шестого вычитателя, выход которого через четвертый блок выделения модуля сигнала подключен к второму входу многовходового компаратора и к первому входу седьмого сумматора, второй вход кото20
25
« 12
14
Фиг. 2
0
5
роге соединен с вькодом второго блока задержки и третьим входом многовходового компаратора, четвертый вход которого подключен к выходу третьего блока задержки и первому входу восьмого сумматора, выходы шестого, седьмого и восьмого сумматоров соединены соответственно с пятым, шестым и седьмым входами многовходового компаратора, восьмой вход которого подключен к четвертому выходу блока управления, причем выход пятого сумматора через последовательно соединенные первый блок перемещения начала координат и пятый блок вьщеления модуля сигнала соединен с вторьм входом шестого сумматора, через последовательно соединенные второй блок перемещения начала координат и шестой блок вьщеления модуля сигнала - с третьим входом седьмого сумматора, а через последовательно соединенные третий блок перемещения начала координат и седьмой блок выделения модуля сигнала - с вторым входом восьмого сумматора, при этом вход блока управления подключен к выходу блока запуска.
(риР.З
Mr
7r)
Редактор М. Недолуженко
Составитель О. Канатчикова
Техред Л.ОлийныкКоррекгорЛ. Патай
Заказ 6ЫЗ/58
Тираж 626
ВНЮШИ Государственного комитета по изобретениям и открптиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. ч/5
- ..« |.«.. «..« |.
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарир{а, 101
(x, 72)
A/ л)
фигЛ
Полиисное
