яяА
СД
ьо
о
О5 i4
Од
Изобретение относится к управлению электрическими машинами и может быть использовано в следящем дискрет ном электроприводе инерционной нагрузки.
Цель изобретения - повьшение на- дежнос и путем компенсации шагов, отработка которых не вызвана управляющими импульсами.
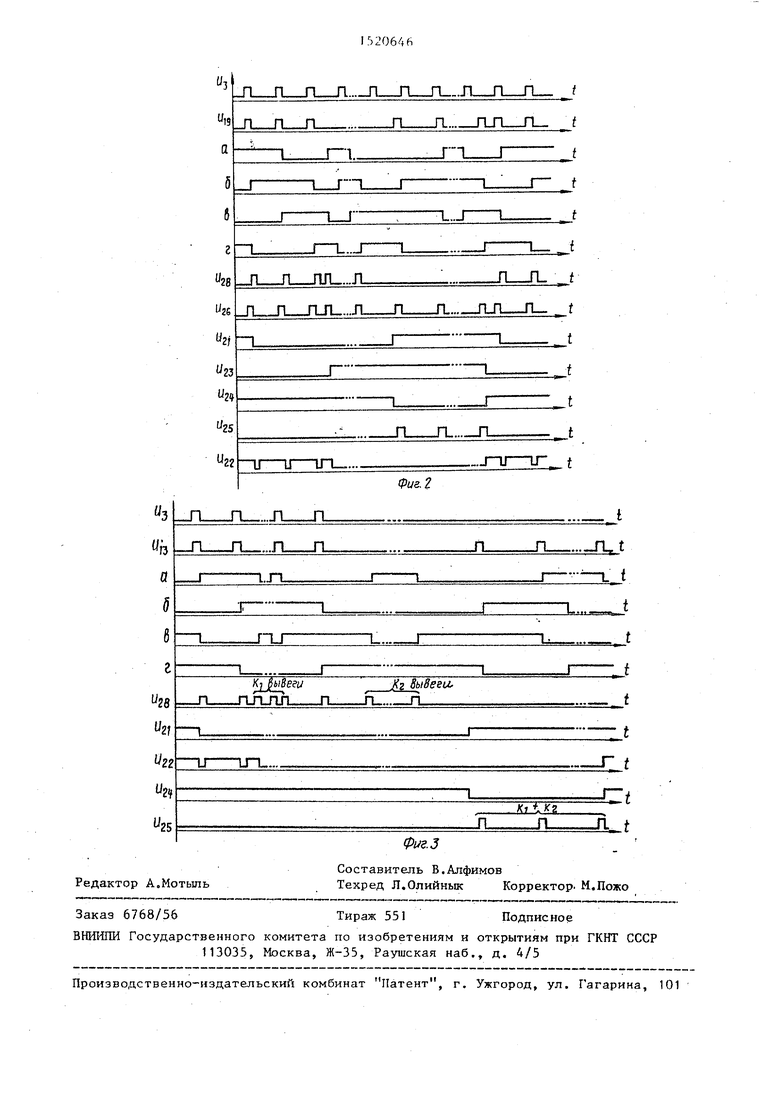
На фиг.1 приведена функциональная |Схема устройства; на фиг.2 - диаграммы напряжений, нояснягощие работу схемы в режиме компенсации ошибочных шагов непосредственно после выбегов ротора; на фиг.3 - диаграммы напряжений, поясняющие работу схемь в режиме компенсации всех ошибочных шагов по окончании цикла работы двигателя.
Устройство содержит первый 1 и второй 2 элементы НЕ, первый 3 и второй 4 элементы ШШ, концевой датчик 5j первьш 6, второй 7 и третий 8 вентили , первый 9 и второй 10 триггеры, одновибратор 11, элемент ЗИ-2ИЛИ-НЕ 12, первый 13 и второй 4 элементы И, распределитель 15 импульсов, мно- гоканальньй усилитель 16, соединенный с шаговым двигателем 7, четвертый вентиль 18, элемент 2И-2ИЛИ 19, реверсивный двоичный счетчик 20, одновибратор 21 с повторным запуском первый 22 и второй 23 дешифраторы нуля, пятый вентиль 2Д, генератор 25 импульсов,, элемент 2И-ЗИЛИ 26, датчик 27 шага, элемент 2И 28, шины синхронизируюш,их импульсов 29 и 30, Ре;ким работы 31, Сброс 32 и Режшч коррекции 33.
Устройство работает следующим образом.
В исходном состоянии по сигналу с шины Сброс 32 счетчик 20 сбрасывается в нуль, что приводит к появ
лению на выходах дешифраторов 22 и 23 соответственно состояний логической единицы: и логического нуля.
Если на шине Режим работы 31 установлен уровень логической единицы, то на выходе вентиля 6 также будет логическая единица (так как логическая единица .на выходе вентиля 24), которая открывает вентили 7 и 8 для прохождения импульсов синхронизации с выходов инверторов 1 и 2 на устгиювочные входы триггера 9. Кроме того, данные импульсы через элемент ИЛИ 3 (роль которого для логических нулей может вьшолнять
45
20646
схема ) поступает на перную группу входов элемента 2И-2ИЛИ 19. Поскольку на выходе вентиля 18 ло- гическая единица, то импульсы синхронизации проходят на выход элемента 2И-2ИЛИ 19 и следуют на суммирующий вход счетчика 20, а также через первую группу входов элемента 26 на
Q входы элементов И 13 и 14. До момента достижения шаговым двигателем предельного положения на выходе элемента ЗИ-2ИЛИ-НЕ 12 имеется высокий потенциал, импульсы синхронизации
J5 через соответствующий элемент И проходят в распределитель 15 импульсов, с выхода которого - на многоканальный усилитель 16.
Как только объект, перемещаемый
20 шаговым двигателем, достигает предела, датчик 5 предельного положения вырабатьшает сигнал, который через элемент ИЛИ 4 приходит на входы одно- вибратора 11 и элемента ЗИ-2ИЛИ НЕ
25 12. При этом на выходе одновибратора 11 появляется импульс, который переключает первьм триггер 9 и записывает во второй триггер 10 предыдущее состояние первого триггера 9. Это
2Q приводит к томз } что на выходе элемента ЗИ-2ИЛИ-НЕ 12 сохраняется высокий уровень, соответствующий элемент И закрывается и открывается другой элемент И, через который поступаJC к)Т импульсы синхронизации, запускающие двигатель в обратном направлении. Если последующие импульсы синхронизации продолжают поступать для отработки шагов двигателем.в том же направ40 лении., что и до момента достижения предела, то первый триггер 9 переключается в нредьщущее состояние. При этом оба триггера 9 и 10 оказываются в одинаковом состоянии, что приводит к появлению на выходе элемента ЗИ-2ИЛИ-НЕ 12 низкого уровня, блокирующего прохождение сигналов через элементы И 13 и 14 в распределитель
15 импульсов, и работа шагового двигателя прекращается.
Если сигнал от датчика 5 предельных положений через элемент ИЛИ 4 запускает одновибратор 1I в момент действия импульса синхронизации, то первьй триггер 9, управляемый данным импульсом по установочному входу, сохраняет свое состояние, которое по сигналу одновибратора I1 записывается во второй триггер 10. Если
в результ ате оба триггера 9 и 10 оказываются вновь и одинаковом состоянии, то на выходе элемента ЗИ- 2ИЛИ-НЕ 12 появляется низкий уровень, который запрещает прохождение импульсов синхронизации для отработки шагов двигателем в обратном направлении. Если триггеры 9 и 10 находятся в противоположных состояниях, то на выходе элемента ЗИ-2Ш1И-НЕ появляется высокий уровень, который разрешает прохождение импульсов через соответствующий элемент И.
синхр. макс
Если на шине Режим работы уста- 15 ный период следования импульсов синх10
06466
жимое на единицу. Но так как в счетчике 20 перед этим был суммирован лишь один импульс синхронизации, то на его информационных выходах вновь появляются логические нули. Одновременно на инверсном выходе одновибра- тора 21 при его запуске вырабатывается логический нуль, подтверждающий состояние логической единицы на выходе вентиля 24.
Постоянная времени одновибратора 21 определяется из условия в - смм/р./иакс
где Т
синхр. макс
- максимально возмож15 ный период следования импульсов синх
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1987 |
|
SU1456934A1 |
| Устройство для управления шаговым двигателем | 1980 |
|
SU951622A1 |
| Шаговый электропривод | 1976 |
|
SU935872A1 |
| Устройство для управления положением исполнительных элементов | 1983 |
|
SU1226413A2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОТКАЗОВ В ШАГОВОМ ЭЛЕКТРОПРИВОДЕ | 1992 |
|
RU2037264C1 |
| Привод | 1977 |
|
SU802917A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1983 |
|
SU1149367A2 |
| Цифровой измеритель центра тяжести видеосигналов | 1990 |
|
SU1723559A1 |
| Устройство для управления шаговым двигателем | 1988 |
|
SU1527703A1 |
| Устройство для предварительной обработки изображений | 1989 |
|
SU1654849A1 |
Изобретение относится к электротехнике и может быть использовано в дискретном следящем электроприводе инерционной нагрузки. Цель изобретения - повышение надежности путем компенсации шагов, отработка которых не вызвана управляющими импульсами. Эти шаги по сигналам датчика 27 шагов выделяются реверсивным счетчиком 20, дешифраторами 22, 23, через элемент 2И-3ИЛИ 26 поступают на входы распределителя импульсов 15 и отрабатываются шаговым двигателем 17. 3 ил.
новлен низкий уровень, то прохождение импульсов синхронизации на установочные входы первого триггера 9 блокируется. В этом случае направление отработки шагов двигателем изменяется на противоположное автоматически по .достижении предельных положений, поскольку изменяет свое состояние первый триггер 9 при поступлении на его вход импульсов от одно- вибратора 11. В результате появляется возможность зациклить в заданных пределах перемещение объекта, управляемого шаговым двигателем.
Если на шине Режим коррекции 33 установлена логическая единица, то обеспечивается компенсация ошибочно отработанных шагов непо.средствен- но после их появления во время работы двигателя. В этом случае устройство работает следующим образом. Первый из импульсов синхронизации с выхода элемента 2И-2Ш1И 19 суммируется счетчиком 20 и, пройдя через элемент 26 и соответствующий элемент И 13 или 14, поступает в распределитель 15, который формирует на своих выходах диаграмму напряжений в соответствии с правилом коммутации фаз двигателя. Данные сигналы проходят в многокальный усилитель 16, питающий обмотки 17 двигателя, и вызывают поворот его ротора на один шаг. При этом датчик 27 шага
ронизации с входных щин 31 или 32. На инверсном выходе одновибратора 21 с повторным запуском устанавливается логический нуль в течение всего цик-
20 ла работы двигателя в заданном диапазоне частот синхронизирующих импульсов. Если в этот период ротор двигателя не совершает ошибочных щагов за счет выбегов, то содержимое счет25 чика 20 от каждого импульса синхронизации изменяется с единицы на куль. Как только ротор двигателя сделает шаг, не обусловленный импульсом синхронизации с шин 29 или 30, на выхо30 де элемента 28 будет выработан импульс, вызванный отработкой этого шага. Данный импульс приходит на вычитающий вход уже обнуленного счетчика 20 и через вторую группу
35 входов элемента 26 (так как на выходе дешифратора 22 присутствует единица) - на входы элементов И 13 и 14. Это приводит к тому, что распределитель 15 формирует временную
40 диаграмму, соответствующую новому положению ротора (догонит его).
Кроме того, по окончании данного импульса, выработанного от ошибочного шага, все разряды счетчика 20
45 установлены в единичное состояние (так как перед этим счетчик 20 был в нуле), что изменит состояние дешифраторов 22 и 23 на противоположное, т.е. на выходе дешифраторов вырабатывает импульс., свидетельствую- 50 2 и 23 будут соответственно логичес- щий об отработке шага. Поскольку в кий нуль и единица. При этом на выхо- этот момент на выходе вентиля 24 при- де вентиля 18 появится логический
сутствует логическая единица,то это разрешает прохождение сигнала от датчика , 27 через элемент 2И 28 на запуск одно- вибратора 21, на первые входы второй и третьей групп входов элемента 26 и на вход обратного счета (-1) счетчика 20, где уменьшает его содерронизации с входных щин 31 или 32. На инверсном выходе одновибратора 21 с повторным запуском устанавливается логический нуль в течение всего цик-
ла работы двигателя в заданном диапазоне частот синхронизирующих импульсов. Если в этот период ротор двигателя не совершает ошибочных щагов за счет выбегов, то содержимое счетчика 20 от каждого импульса синхронизации изменяется с единицы на куль. Как только ротор двигателя сделает шаг, не обусловленный импульсом синхронизации с шин 29 или 30, на выходе элемента 28 будет выработан импульс, вызванный отработкой этого шага. Данный импульс приходит на вычитающий вход уже обнуленного счетчика 20 и через вторую группу
входов элемента 26 (так как на выходе дешифратора 22 присутствует единица) - на входы элементов И 13 и 14. Это приводит к тому, что распределитель 15 формирует временную
диаграмму, соответствующую новому положению ротора (догонит его).
Кроме того, по окончании данного импульса, выработанного от ошибочного шага, все разряды счетчика 20
установлены в единичное состояние (так как перед этим счетчик 20 был в нуле), что изменит состояние дешифраторов 22 и 23 на противоположноль, запрещающий дальнейшее выполнение программы отработки шагов по . синхронизирующим импульсам с шин 29 и 31. .
Если количество шагов выбега больше одного, то на инверсном выходе одновибратора 21 в течение всего
времени их совершения будет удерживаться логический нуль от импульсов с соответствующих обмоток двигателя Эти импульсы, проходя через третью группу входов элемента 26 (так как на выходе дешифратора 23 присутствует уров-ень логической единицы), каж дый раз заставляют распределитель 15 догонять положение ротора. Одновременно каждый из них уменьшает содержимое счетчика 20 на единицу. Таким образом содержимое счетчика 20 равно М + 1 -К, где М - максимальное содержимое счетчика; К - число шагов, не связанных с синхронизирующими импульсами. Процесс совершения выбегов ротором считается законченным после того, как в течение 1зремени Одц на выходе элемен та 28 не появляется
В этом случае (по
oJ
очередной импул истечении времени на инверсном выходе одновибра тора 21 появляется уровень логической едини1ды, устанавливающий на выходе вентиля 24 логический нуль (так как на выходе дешифратора 23 Присутствует логическая единица), который поступает через вентиль 6 на входы-вентилей 7 и 8, на вход элемента ИЛИ 4, на вторые входы элемента 28 и на вход запуска генератора 25 импульсов. В результате этого одновременно происходят следующие процессы: запреща.ется прохождение синхронизирующих импульсов на управляющие входы триггера 9, срабатывает одновибратор 11 (по перепа ДУ уровней с выхода элемента 4), чт вызывает изменение состояния триггера 9 и запись его предыдущего состояния в триггер 10, запрещается прхождение 1-1мпульсов с обмоток фаз двгателя через элемент 28, запускаетс генератор 25 импульсов. Импульсы с выхода генератора 25 через вторую группу входов элемента 19 поступают на суммирующий вход счетчика 20 и через первую группу входов элемента 26 - на входь элементов И 13 и 14, вызывая обратную отработку шагов двигателя (так как состояние триггера 9 направления изменяется на протвоположное) до тех пор, пока число импульсов коррекции от генератора 25 не становится равным числу К, за фиксированному в счетчике 20, Как только это случится, на информационных вь1ход4х счетчика 20 появляются
0
JQ
5
5
30
35
40
45
50
55
логические нули, что соответственно обусловливает состояние логического нуля на выходе дешифратора 23 и логической единицы на выходе вентиля 24, которая блокирует работу генератора 25.
Кроме того, на вторые входы вентилей 6 и 18 и вторые входы элемента 28 поступает разрешающий уровень логической единицы, т.е. схема приведена в исходное состояние и готова к выполнению программы отработки шагов по сигналам синхронизирующих импульсов с шин 29 и 31. Таким образом обеспечивается компенсация ошибочно отработанных шагов непосредственно после их появления.
Если на шину Режим коррекции 33 подается потенциал логического нуля, то обеспечивается компенсация всех ошибочно совершенных шагов по окончании цикла работы двигателя. В этом случае каждый импульс, свидетельствующий о совершении.выбега, уменьшает содержимое счётчика 20 на единицу, не вызывая срабатывания вентиля 18 (т.е. на его первом входе присутствует логический нуль) и останова работы двигателя. Одновременно при каждом выбеге, как и в предьщущем случае, распределитель.15 догоняет положение ротора, но логическая единица с выхода дешифратора 23 не изменяет состояние на выходе вентиля 24, так как оно обусловлено логическим нулем с инверсного выхода одновибратора 2, удерживаемого в этом состоянии импульсами с выхода элемента 28 в течение всего цикла работы двигателя. По окончании цикла работы (прекращение серии синхронизирующих импульсов на шинах 29 и 30) одновибратор 21 удерживается в нуле до тех пор, пока не будет выполнен счет импульсов выбега ротора (если они есть) после остановки двигателя. В результате в счетчике 20 окажет.ся записанным число М 1 - - К, - К2, где М - максимальное значение числа в счетчике 20; К, - число выбегов в процессе работы; К - число выбегов после останова двигателя.
После того, как в течение време- не придет очередной импульс с
ни
05
обмоток двигателя, свидетельствующий о вращении ротора, на инверсном выходе одновибратора 21 установится логическая едиии.1.а, которая поступит на второй вход вентиля 24 и обусловит выработку на его выходе логичес кого нуля (так как на первом входе вентиля 24 присутствует единица с выхода дешифратора 23), разрешающего выработку генератором 25 импульсов коррекции. Дальнейшая работа устройства аналогична описанному для режима коррекции после каждого ошибочного шага.
Таким образом, благодаря введенным связям и элементам в устройстве обеспечивается компенсация ошибочно совершенных шагов путем их обратной отработки, выполняемой либо непосредственно после совершения выбегов ротора, либо по окончании работы двигателя, что повышает надежность работы предлагаемого устройства.
Формула изобретения
Устройство для управления шаговым двигателем, содержащее распределитель импульсов, многоканальный выходной усилитель, датчики предельных положений объекта,.первьй и второй триггеры, одновибратор , элемент
.ЗИ-2ИЛИ-НЕ, два элемента ИЛИ, два элемента НЕ, два элемента И и два вентиля, причем инверсные выходы элементов И соединены с входами распределителя импульсов, входы элементов И соединены соответственно с прямым и инверсным выходами первого триггера и с выходом элемента ЗИ 2ИЛИ-НЕ первая и вторая группы входбв элемента ЗИ-2ИЛИ НЕ соединены соответствен
но с прямым и инверсным выходами первого и второго триггеров и выходом второго элемента ИЛИ, D-вход первого триггера соединен с его инверс ным выходом, D-вход второго триггера соединен с прямым выходом первого триггера, счетные входы первого и второго триггеров соединены с выходом одновибратора, вход которого соединен с выходом второго элемента ИЛИ входы которого соединены с выходами датчиков предельных положений объекта, установочные входы первого триггера соединены с выходами соответственно первого и второго вентилей, вторые входы которых соединены с выходами первого и второго элементов НЕ, входы которых соединены с соответствующими входами первого элемента Ш1И и входными шинами устройства, отличающееся тем, что, с целью повьпнения надежности работы устройства путем компенсации шагов, отработка которых не вызвана управ- ляюш;ими импульсами, в него введены шины Режим работы и Режим коррекции, датчик шагов двигателя, эле0 мент 2И, одновибратор с повторным запуском, третий, четвертьп и пятый вентили, реверсивный счетчик, первый и второй дешифраторы, элемент 2И-2ИЛИ, элемент 2И-ЗИЛИ, генератор
5 импульсов, причем выход многоканального усилителя подключен к соответствующим обмоткам шагового двигателя, соединенного с датчиком шага, выход которого связан с nepBL-nvt
0 входом элемента 2И, второй вход которого подключен к выходу пятого вентиля, входу запуска генератора импульсов, третьему входу второго элемента ИЛИ и к первому входу тре
5 тьего вентиля, второй вход которого связан с шиной Режим работы, а выход - с первыми входами первого и второго вентилей, выход элемента 2И соединен с вычитающим входом счет0 чика, входом одновибратора с повторным запуском и с первыми входами второй и третьей групп входов элемента 2И-ЗИЛИ, вторые входы которых подключены соответственно к выходам
5 первого и второго дешифраторов,
соединенных с первыми входами четвертого и пятого вентилей, вторые входы которых подключены соответственно к шине Режим коррекции и к инверсно-
0 му выходу одновибратора с повторным запуском, а выход четвертого вентиля соединен с первым входом первой группы входов элемента 2И-2ИЛИ, вторая группа входов которого связана с
5 выходом генератора импульсов, второй вход первой группы входов элемента 2И-2ИЛИ подключен к выходу первого элемента ИЛИ, а выход - к суммирующе- iy входу реверсивного счетчика и к
0 первой группе входов элемента 2И-ЗИЛИ, выход которого соединен с третьими входами первого и второго элементов И, входы первого дешифратора подключены ко всем информационньпу выходам
5 реверсивного счетчика, а входы второго дешифратора соединены с информа ционными выходами счетчика, за исключением младшего разряда.
J-L...
Лnju...a
j
игг
-in....
1
t
ПTL.П
| Устройство для управления шаговым двигателем | 1986 |
|
SU1399883A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления шаговым двигателем | 1980 |
|
SU951622A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
