I
Изобретение относится к автоматике и может использоваться в системах управления с применением шаговых-двигателей .
Целью изобретения является повышение надежности и быстродействия устройства в режимах реверсирования при изменениях частоты следования импульсов синхронизации от минимального значения до номинального значения максимальной частоты отработки шагов двигателем.
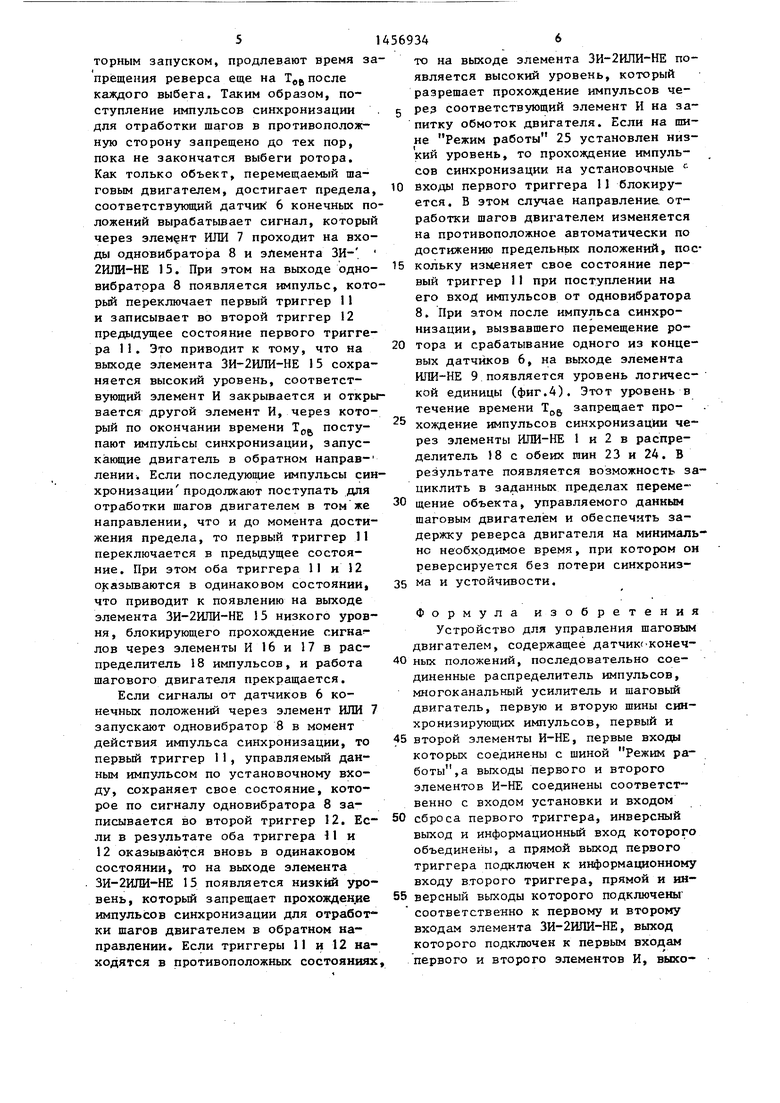
На фиг.1 приведены графики, иллюстрирующие соотношения частоты.- реверса и частоты отработки шагов для известного (а) и предлагаемого (б) устройств, зависимость предельной частоты реверса для шагового
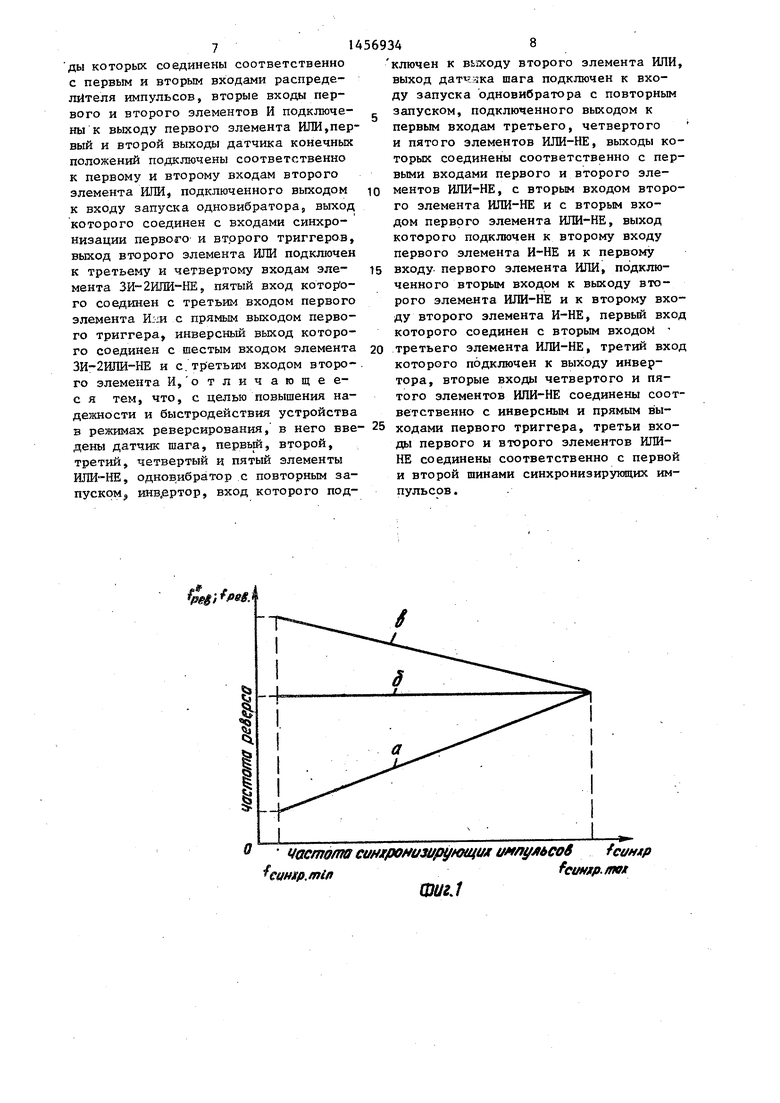
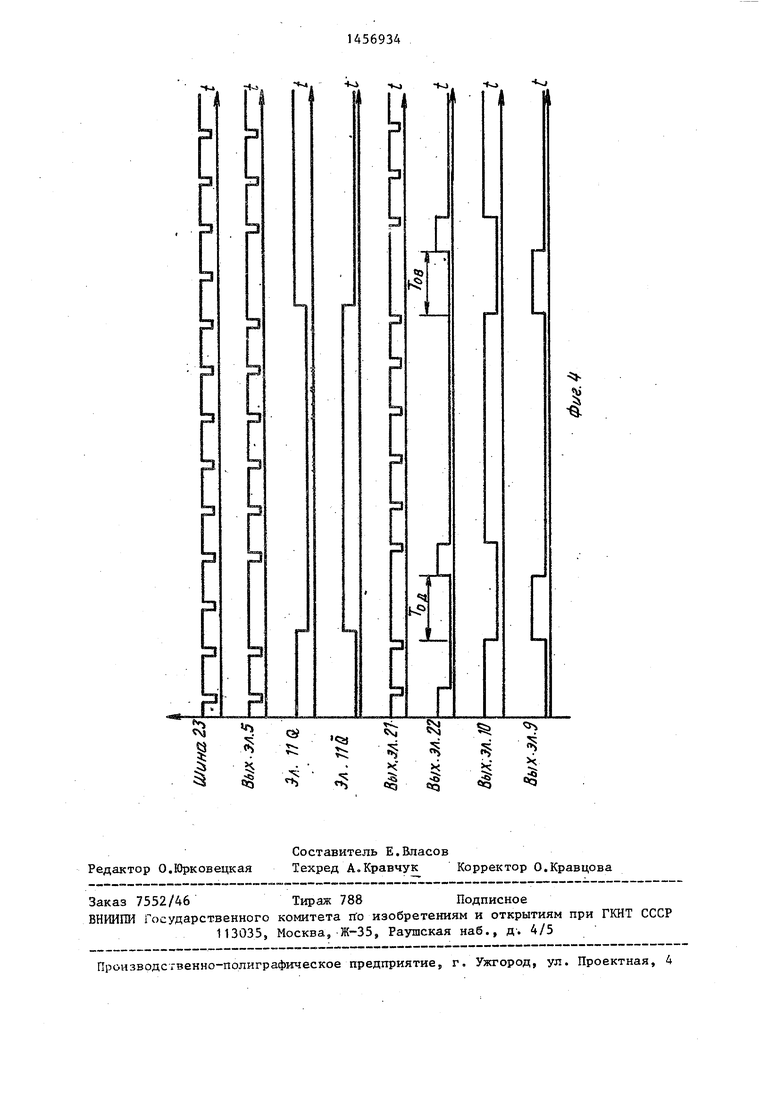
двигателя с нагрузкой (в); на фиг.2- функциональная схема устройства;на фиг.З и 4 - соответственно диаграммы работы устройства при реверсировании в следящем (программном) режиме Цикл.
Сущность изобретения (фиг.1) заключается в том, что частота реверсирования двигателя задается независимо от частоты синхронизирукяцих импульсов, исходя из максимально возможного быстродействия данного привода при реверсе и с учетом окончания выбегов (если они есть) при торможении ротора двигателя. В этом случае после совершения двигателем ша- га в одном из направлений автоматически запрещается поступление им-
4 СП
Ф D
Од
пульсов управления с шины другого направления. Запрет длитбя в течение Т - минимального периода между импульсами синхронизации в течение которого двигатель после изменения направления вращения на обратное реверсируется с сохранением устойчивости и без потери синхронизма. Причем Тоц выбирается из условия, что до этого частота синхроимпульсов совпадала с номинальным значением максимальной частоты управления шаговым двигателем. Необходимое время паузы для устойчивого реверсирования при работе двигателя на более низких частотах значительно меньше, и устойчивость работы обеспечивается с запасом. В случае появления выбегов во время торможения время запрета реверса автоматически продлевается после каждого выбега на время Т.
Устройство для управления шаговым двигателем содержит первый 1 и второй 2 элементы ИЛИ-НЕ, первый 3 и второй 4 элементы И-Щ, первый элемент ИЛИ 55 датчики 6 конечньж положений (объекта), второй элемент ИЛИ 7, одновибратор 8, третий элемент ИЛИ-НЕ 9, инвертор 10, первый 11 и второй 12 триггеры, четвертый 13 и пятый 14 элементы ИЛИ-НЕ, элемент ЗИ-2ИЛИ-НЕ 15, первый 16 и второй 17 элементы И, распределитель 18 импульсов, многоканальньй усилитель 19, шаговый двигатель 20, датчик 21 шага, одновибратор 22 с повторным запуском шины 23 и 24 синхронизирующих импульсов и шину Режим работы 25.
Устройство работает следующим образом .
В исходном состоянии, когда двигатель 20 не отрабатывает шаги, на инверсном выходе одновибратора 22 находится высокий потенциал, что дает на выходах элементов ИЛИ-НЕ 13, 14 и 9 потенциалы логических нyлeйf независимо от состояния триггера 11. Эти потенциалы разрешают прохождение синхронизирующих, импульсов с шин 23 и 24 через элементы ИЛИ-НЕ 1 и 2.
Если на шине Режим работы установлен высокий потенциал, то логический ноль на выходе элемента ШШ- НЕ 9 остается на протяжении всего процесса работы устройства. При этом импульсы синхронизации с шины 23 или 24 через элементы 1 или 2 и 3 или 4
приходят на один из установочных входов первого триггера 11 и управляют его состоянием. Кроме того, импульсы через элемент ИЛИ 5 посту- пают на входы элементов И 16 и 17. До момента достижения предельного положения на выходе элемента ЗИ-2ШШ- НЕ . 15 имеется высокий потенциал и
импульсы синхронизации через соответствующий элемент И 16 или 17 проходят в распределитель 18 импульсов, ча выходе которого формируется временная последовательность сигналов
5 соответственно правилу коммутации фаз двигателя. Эти импульсы через многоканальный усилитель 19 поступа- .ют на запитку обмоток шагового двигателя 20. Как только двигатель 20
0 отработает первый шаг по сигналу с одной ий шин 23 или 24, датчик 21 шага вырабатьшает импульс, который, поступив на вход одновибратора 22 с повторным запуском, вызьшает появле5 ние логического нуля на его инвер с- ном выходе. Логический ноль на выходе однсвибратора 22 в сочетании с логическим нулем с одного из выходов триггера 11 приводит к появлению ло0 гической единицы на выходе элемента ИЛИ-НЕ 13 или 14,что запрещает прохождение импульса синхронизации через соответствующий элемент ИЛИ-НЕ 1 ,или 2. В результате этого в течение
5 времени Т,ц заблокировано прохождение импульсов синхронизации с шин 23 и 24 на отработку шагов в противоположном направлении (т.е. если выполнялась отработка шага условно 0 влево по сигналам с шины 24, то заблокировано поступление сигналов на отработку вправо по сигналам с шины 23,::и наоборот). Постоянная вре- мени одновибратора выбрана из усло ВИЯ TOB f-- , где fpee - максималь - р«в
ная частота реверсирования для данного двигателя. Таким образом,учи- тьшая особенность работы одновибра50 торов с повторным запуском, если в течении времени , после отработки двигателем шага в одном из направлений приходит сигнал на реверс, то двигатель 20 на него не реагирует
55 (фиг.З). Кроме того, в случае появления выбегов в режиме торможения ротора двигателя 20 датчик 21 шага вырабатывает импульсы, которыеt поступив на вход одновибратора 22 с повторным запуском, продлевают время запрещения реверса еще на Тв после каждого выбега. Таким образом, поступление импульсов синхронизации для отработки шагов в противополозк- ную сторону запрещено до тех пор, пока не закончатся выбеги ротора. Как только объект, перемещаемый шаговым двигателем, достигает предела, соответствующий датчик 6 конечных положений вырабатьшает сигнал, который через элемент ИЛИ 7 проходит на входы одновибратора 8 и элемента ЗИ- 2ИЛИ-НЕ 15. При этом на выходе одно- вибратора 8 появляется импульс, кото рьй переключает первый триггер 1 и записывает во второй триггер 12 предыдущее состояние первого триггера П. Это приводит к тому, что на выходе элемента ЗИ-2ШШ-НЕ 15 сохраняется высокий уровень, соответствующий элемент И закрывается и открывается другой элемент И, через который по окончании времени Т поступают импульсы синхронизации, запускающие двигатель в обратном направ- лении. Если последующие импульсы синхронизации продолжают поступать .для отработки шагов двигателем в том же направлении, что и до момента достижения предела, то первый триггер 11 переключается в предыдущее состояние. При этом оба триггера II и 12 оказьтаются в одинаковом состоянии, что приводит к появлению на выходе элемента ЗИ-2Ш1И-НЕ 15 низкого уровня , блокирующего прохождение сигналов через элементы И 16 и 17 в распределитель 18 импульсов, и работа шагового двигателя прекращается.
Если сигналы от датчиков 6 конечных положений через элемент ИЛИ 7 запускают одновибратор 8 в момент действия импульса синхронизации, то первый триггер 11, управляемый данным импульсом по установочному входу, сохраняет свое состояние, которое по сигналу одновибратора 8 записывается во второй триггер 12. Если в результате оба триггера I и 12 оказываются вновь в одинаковом состоянии, то на выходе элемента ЗИ-2ИЛИ-НЕ 15 появляется низкий уровень, который запрещает прохождение импульсов синхронизации для отработки шагов двигателем в обратном направлении. Если триггеры 11 и 12 находятся в противоположных состояниях
то на выходе элемента ЗИ-2ИЛИ-НЕ появляется высокий уровень, который разрешает прохождение импульсов через соответствующий элемент И на за- питку обмоток двигателя. Если на шине Режим работы 25 установлен низкий уровень, то прохождение импульсов синхронизации на установочные
входы первого триггера 11 блокируется. В этом случае направление отработки шагов двигателем изменяется на противоположное автоматически по достижению предельньк положений, поскольку изменяет свое состояние первый триггер 11 при поступлении на его вход импульсов от одновибратора 8. При этом после импульса синхронизации, вызвавшего перемещение ротора и срабатывание одного из концевых датчиков 6, на выходе элемента ИПИ-НЕ 9 появляется уровень логической единицы (фиг.4). Этот уровень в течение времени Т запрещает прохождение импульсов синхронизации че рез элементы ИЛИ-НЕ 1 и 2 в распределитель 18 с обеих гаин 23 и 24. В результате появляется возможность зациклить в заданных пределах перемещение объекта, управляемого данным шаговым двигател1ем и обеспечить задержку реверса двигателя на минимально необходимое время, при котором он реверсируется без потери синхронизма и устойчивости.
Формула изобретения
Устройство для управления шаговым
двигателем, содержащее датчик конечных положений, последовательно соединенные распределитель импульсов, многоканальный усилитель и шаговый двигатель, первую и вторую шины синхронизирующих импульсов, первый и
второй элементы И-НЕ, первые входы которых соединены с шиной Режим работы, а выходы первого и второго элементов И-НЕ соединены соответст венно с входом установки и входом
сброса первого триггера, инверсный выход и информационный вход которого объединены, а прямой выход первого триггера подключен к информационному входу в.торого триггера, прямой и инверсный выходы которого подключены соответственно к первому и второму входам элемента ЗИ-2ШШ-НЕ, выход которого подключен к первым входам первого и второго элементов И, выхоы которых соединены соответственно первым и вторым входами распредеителя импульсов, вторые входы первого и второго элементов И подключены к вькоду первого элемента ИЛИ,первый и второй выходы датчика конечных положений подключены соответственно к первому и второму входам второго элемента ИЛИ., подключенного выходом к входу запуска одновибратора, выход которого соединен с входами синхронизации первого и второго триггеров, выход второго элемента ИЛИ подключен к третьему и четвертому входам элемента ЗИ-2ИЛИ-НЕ, пятый вход которого соединен с третьим входом первого элемента И:;;и с прямым выходом первого триггера, инверсный выход которого соединен с шестым входом элемента ЗИ-2ИЛИ-НЕ и с. тр етьим входом второго элемента И, отличающее- с я тем, что, с целью повышения надежности и быстродействия устройства в режимах реверсирования, в него вве день датчик шага, первьШ, второй, третий, четвертый и пятый элементы ИЛИ-IiE, однов.ибратор с повторным запуском HHBjSpTOp, вход которого под.10
15
20
25
ключен к выходу второго элемента ИЛИ, выход шага подключен к входу запуска одновибратора с повторньпу запуском, подключенного выходом к первым входам третьего, четвертого и пятого элементов ИЛИ-НЕ, выходы которых соединены соответственно с первыми входами первого и второго элементов ИЛИ-НЕ, с вторым входом второго элемента ИЛИ-НЕ и с вторым входом первого элемента ИЛИ-НЕ, выход которого подключен к второму входу первого элемента И-НЕ и к первому входу первого элемента ШШ, подключенного вторым входом к выходу второго элемента ИЛИ-НЕ и к второму входу второго элемента И-НЕ, первый вход которого соединен с вторым входом третьего элемента ИЛИ-НЕ, третий вход которого подключен к выходу инвертора, вторые входы четвертого и пятого элементов ИЛИ-НЕ соединены соответственно с инверсным и прямым выходами первого триггера, третьи входы первого и второго элементов ИЛИ- НЕ соединены соответственно с первой и второй шинами синхронизирующих импульсов .

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1987 |
|
SU1520646A1 |
| Устройство для управления шаговым двигателем | 1980 |
|
SU951622A1 |
| Устройство для управления положением исполнительных элементов | 1983 |
|
SU1226413A2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОТКАЗОВ В ШАГОВОМ ЭЛЕКТРОПРИВОДЕ | 1992 |
|
RU2037264C1 |
| Шаговый электропривод | 1976 |
|
SU935872A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОТКАЗОВ В ШАГОВОМ ЭЛЕКТРОПРИВОДЕ | 1991 |
|
RU2032265C1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1394390A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1983 |
|
SU1149367A2 |
| Устройство для управления шаговым двигателем | 1988 |
|
SU1527702A1 |
| Привод | 1977 |
|
SU802917A1 |
Изобретение относится . автоматике и предназначено для , .лользо- вания в системах управления с применением шаговых двигателей. Целью изобретения является повышение надежности и быстродействия устройства в режимах реверсирования при из- менениях частоты следования импульсов синхронизации от минимального значения до номинального значения максимальной частоты отработки шагов двигателем. Это осуществляется за счет задания частоты реверсирования двигателя независимо от частоты следования синхронизирукнцих импульсов, исходя из максимально возможного быстродействия данного привода при реверсе и с учетом окончания возможных выбегов при торможении ротора двигателя. 4 ил. (Л
f/eg}ffl8iJ
цаствта синхронизи/ нщил цмлумсов fcunxp ewap.miflfcuNfp.moM
тиг.1
Фиг. г
| Устройство для управления шаговым двигателем | 1977 |
|
SU641396A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления шаговым двигателем | 1980 |
|
SU951622A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
