/,
Х г
а т
С
«д
ISD
(pi/Z.f г4льном определении параметров трех- фазньгх синхронных машин. Целью изобретения является расширение области .применения за счет обеспечения допол- нительного определения активного и индуктивного сопротивлений рассеяния демпферной обмотки. Для чего воздействуют на обмотку 13 статора однофазным переменным напр чженивм номиналь- ной частоты и устанавливают ротор в положение наибольшей магнитной связи с обмоткой статораJ измеряют напряже- ние, ток и активную мощность, потребляемую обмоткой статора, с помощью
иэмерителей 9,8 и 11, воздействуют на обмотку 15 возбуя ения током изменяющейся амплитуды и фазы при измерении магнитного потока по продольной оси с помощью датчика 7 магнитного потока до его компенсации, в момент которой осуществляют измерение зиаченяй напряже1шя, тока и активной мощности обмоток возбуждения и статора с помощью иэмерителей 10,12,9,8 и 11 и по полученным определяют индуктивные сопротивления рассеяния обмоток статора, воэбулсцения и демпферной обмотки. 3 ил.

Изобретекие относится к области электротехш1ки, преимутцественно к промьшшенной электроэнергетике, и может использовано при эксперимен
Изобретение относится к области электротехники, преимущественно к промышленной электроэнергетике, и может быть использовано при эксперимен- тальном определении параметров трехфазных синхронных машин.
Цеяью изобретения является расширение области применения за счет обеспечения дополнительного определения активного и индуктивного сопро тивлений рассеяния демпферной обмот- ки.
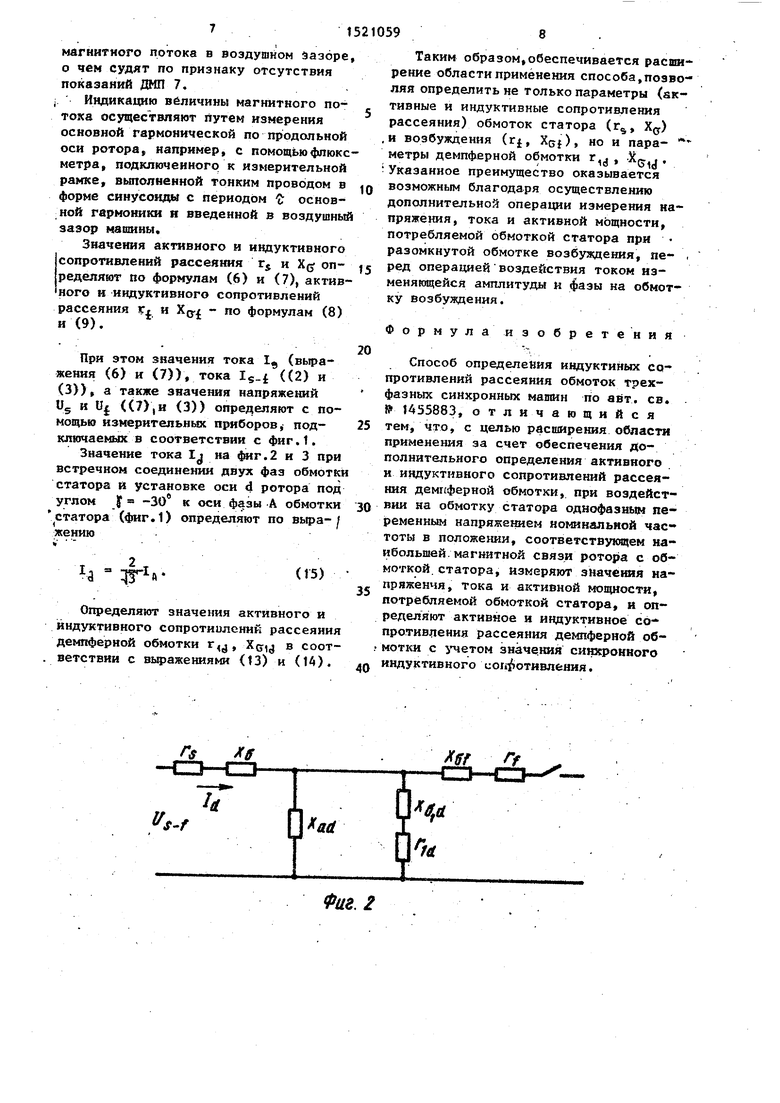
На фиг.i щ)едставлен пример устройства для реализации данного способа; на фиг,2 приведена схема замещения синхронной машины по продольной оси ротора при воздействии на обмотку статора однофазным переменным напряжением номинальной частоты при разомкнутой обмотке возбужденияj на 4н1г,3 - схема замещения синхроиной машины по продс пьной оси роторе при компенсации потока взаимоиндукции а воздушном зазоре.
На фиг,1 йозиадями обозначены: первый 1 и второй 2 noTeHicMan-perynH- торы, фазорегулятор 3, первый 4 и второй 5 йтунты, блок б измерения фазы, датчик 7 магнитного потока, измерители 8.1, 8.2 тока, первый 9, второй 10 измерители напряжения, пер вый 11 и второй 12 измерители активной мощности, обмотки исследуемой синхронной машины: статора 13, демпферная 14 и возбуждения 15.
Сущность изобретения заключается в следунацем.
Измерения напряжения Од. тока Ij. и активной мощности со стороны обмотки статора Pg.j при разомкнутой
обмотке возбуждения (в системе единиц СИ) позволяют определить полное сопротивление (в системе относительных единиц)
2,.i -ReZg-t JJ..z,. (r,j
%М (
где ReZg.,
действительная и мнимаИ части комплексного сопротивления ;
KeZ
...
«S
21
9-i
(2)
5 л
5
i . Z ,Pe.i v«
v-i-Z;F f 2frr
(3)
где ,Ху ,X(y,j - активные индуктивные сопротивления рассеяния обмотки статора и демпферной обмотки}
Хд - cotipoTHBnemte взаимоиадукции мехяу обмоткамя синхронной машины по продольной оси ротора ,
Zgj - базисное сопротивление обмотки статора
- 2,8 .й-; Ом.
1«в«
Измерения напряжений токов 1,1 и активных мощностей об5 -1521059 статора и аозбутадения (в систё- Arf,+AX
d
г- O
ме единиц СИ) в момент компелсации основной гармонической индукций магнитного потока в воздушном зазоре позволяют определить комплексные сопро,- тивления (в системе относительных единиц)
Z-ReZ5+jl i,Z5 r3+jX5 ,;
%
где .ReZ,
, 2I|
%-4 -..
(7)
r, ReZ,::- т|
Zij
i Z
IS
tfi
. .,.l..J(Hif-(|i)-(9) fS N i| If
гд€ Z,ft - базисное сопротивление обмотки возбуждения, Ом. Измеренные комплексные сопротивления Z,. iis,Z| позволяют определить активные и индуктивные сопротивления обкоток статора, возбуждения и демп- ферной при известном значении син- хрокнвго индуктивного сопротивления
. /-
. Величина Хд ненасыщенное значение), входящая в вьфажение (1), опре- деляётся выражением
; б
. Сяакрониое индуктивное сопротив- ленйе-может быть определено, напри-. ыер, по методу холостого хода и ко- роткого замыкания.
/Активные и индуктивные сопротивления рассеяния демпферной обмотки оп- ,;ределяк тся иутем решения системы из двух уравкеИйй, определяемьк действительной И МйИмой частями вьфажения
(О,
... : - .: : : .
-. if После преобразований (11) и (12) получим
f,+AX
d
г- ,,+2AX ,X.. OiJ d adad о о ов .
(13)
,-
15
20
)
25
- 35
40
45
50
,
10
5 fd «-XaP 4 d(,,r
-..
где Г }
.25.i-XtfРешение системы нелинейных уравнений (13), (14) для определения и Х(у возможно одним из численных методов прикладной математики, напри- мер, принадлежащих к группе итерационных алгоритмов, использующих направление градиента, - методом (про- ,цедурой) Гаусса-Ньнп-она.
При осуществлении данного способа обмотку 13 статора подключают к однофазному источнику переменного напряжения номинальной частоты (не показан), увеличивают с помощью первого потенциал-регулятора 1 значение тока в обмотке 13 статора в пределах 0,5 номинальной величины, устанавливают с помощью мостового крана или валоповсротного устройства ротор в положение наибольшей магнитной связи с обмоткой статора, о чем судят по максимальному значению ЭДС трансформации, наводимой на выводах разомкнутой обмотки 15 возбуждения, измеряют напряжение Ug , ток 1. и активную мощность Р , пoтpeбляe гyю обмоткой статора при разомкнутой обмотке возбуждения, с помощью измерителей 9i 8 и 11 соответственно, устанавливают датчик 7 магнитного потока (ДМП) в воздушном зазоре для измерения основной гармонической индукции по продольной оси магнитного поля, подключают к источнику питания переменного напряжения номинальной частоты (не показан) обмотку 15 возбуждения, увеличивают с помощью второго потенциал- регулятора 2 ток в цепи-обмотки воз- бузкдения, поддерживая путем воздействия на фазорегулятор 3 фазовый сдвиг в обмотках 13,15 статора и возбуждения, равный 180 , измеряют значения напряжений из,и, токов 1,1 и активных мощностей обмоток статора и возбуждения Р,Р с помощью соответственно Измерителей 9, 10,8.1, 8.2, 11, 12 при достижении компенсации
магнитного потока в воздушном эазоре, о чем судят по признаку отсутствия показаний ДМП 7.
Индикацию величины магнитного потока осуществляют путем измерения основной гармонической по продольной оси ротора, например, с помощьюфлюкс- метра, подключенного к измерительной рамке, выполненной тонким проводом в форме синусоиды с периодом t основной гармоники я введенной в воздушный зазор машины.
Значения активного и индуктивного сопротивлений рассеяния г и X(j определяют по формулам (6) и (7), активного и индуктивного сопротивлений рассеяния иг г и Х(у/ - по формулам (8) и (9).
При этом значения тока 1 (выражения (6) и (7)), тока le-i ((2) и (3)), а также значения напряжений Ug и и ((7),и (3)) определяют с помощью измерительных приборов, подключаемых в соответствии с фигЛ.
Значение тока Ij на г.2 и 3 при
встречном соединении двух фаз обмотки
статора и установке оси d ротора под
углом У 30 к оси А обмотки
статора (фиг.1) определяют по выра-/
жению
Ч
W
(15)
Определяют значения активного и индуктивного сопротиилсник рассеяния демпферной обмотки r,j, в соответствии с вщ)ажениями (13) и (14). Q
rs XS
V,.
f f
Фае. 2
Таким образом,обеспечивается расши- рение области применения способа,позволяя определить не только параметры (активные и индуктивные сопротивления рассеяния) обмоток статора (г, Х(у)
,и возбуждения (г, Хр), но и пара- метры демпферной обмотки r,j , ,
Указанное преимущество оказывается возможным благодаря осуществлению дополнительной операции измерения напряжения, тока и активной мощности, потребляемой обмоткой статора при разомкнутой обмотке возбуадения, пе- , ред операадей воздействия током изменяющейся амплитуды и фазы на обмотку возбуждения.
Формула изобретения
Способ определевия индуктиных сопротивлений рассеяния обмоток трехфазных синхронных машин по авт. св. № 1455883, отличающийся тем, что, с целью расширения области применения за счет обеспечения дополнительного определения активного и индуктивного сопротивлений рассеяния демпферной обмотки, при воздействии на обмотку статора однофазным переменным напряжением номинальной частоты в положении, соответствующем наибольшей, магнитной связи ротора с обмоткой, статора, измеряют значения напряжения, тока и активной мощности, потребляемой обмоткой статора, и определяют активное и индуктивное с6- против ения рассеяния демпферной об- . мотки с i-MeTOM значе.ния синхронного ИНДУКТИВНОГО ч:оп)отивления.
Sf
4rf
Хв,Л
М If
rf
liZ,y
| Устройство для соединения труб | 1987 |
|
SU1435883A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
